Make your motor-controlled projects reliable with DRV8830 and PIC18F47K42TQFP
Achieve optimal motor responsiveness

Published Feb 13, 2024
Click board™
DC Motor 11 Click
Dev. board
Curiosity Nano with PIC18F47K42
Compiler
NECTO Studio
MCU
PIC18F47K42TQFP
Embrace brushed motor control. Control motor current limiting and current sensing using this DC motor control solution!
A
A
Hardware Overview
How does it work?
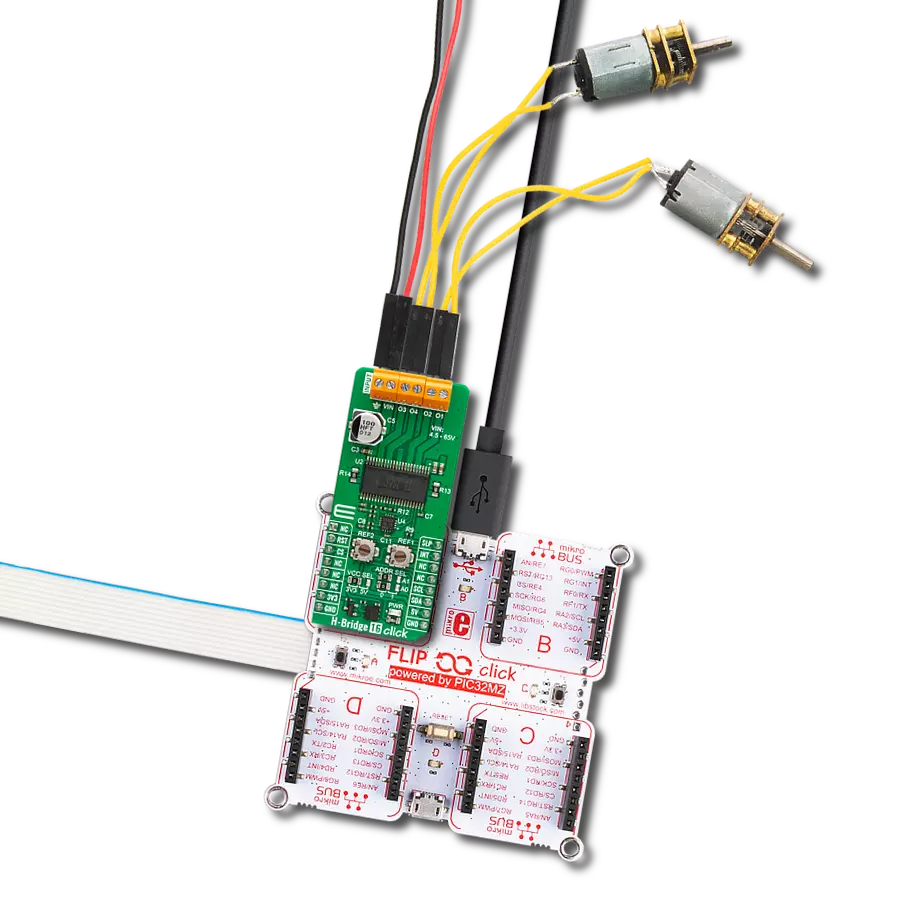
DC Motor 11 Click is based on the DRV8830, a low-voltage motor driver with a serial interface from Texas Instruments. This IC is an integrated H-Bridge driver with a current regulation circuit limiting the current through the connected load with a single resistor. A low ON resistance through the H-Bridge reduces the overall power dissipation, while an advanced control circuit injects dead-time intervals whenever the outputs change their state, preventing current shoot-throughs. The DRV8830 also integrates protection features, including undervoltage, overcurrent, and overtemperature protection. Each of these events will cause the H-Bridge MOSFETs to be disabled. After removing a fault condition, the device will continue its operation. The DRV8830 includes an internal reference voltage that is connected to a DAC. This DAC generates
a voltage that is used to set the PWM-regulated output voltage and, therefore, the speed and direction of the motor rotation. The DAC is controlled by the VSET bits from the I2C interface. For detailed commands for desired output voltages, refer to the DRV8830 datasheet. DC Motor 11 click uses the I2C interface to communicate with the main MCU and the fault pin (FLT), which is routed to the INT pin of the mikroBUS™ socket. The I2C address can be selected using additional SMD jumpers (JP1 and JP2) labeled ADDR SEL, determining the least significant bits of the DRV8830 slave I2C address. Although the DRV8830 supports up to 1A Maximum DC/RMS or Peak Drive Current Current through the connected load, it is limited to a maximum of 0.6A. A higher current will cause the overcurrent protection to be activated.
The peak current through the motor is limited to about 1A, ensuring reliable spin-up while preventing the overcurrent protection from being activated, even if a large load torque is applied. Although there is a low resistance across the H-Bridge, the current should be monitored to prevent excessive heating in situations where the load is reasonably high. This Click board™ can only be operated with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
PIC18F47K42 Curiosity Nano evaluation kit is a cutting-edge hardware platform designed to evaluate the PIC18F47K42 microcontroller (MCU). Central to its design is the inclusion of the powerful PIC18F47K42 microcontroller (MCU), offering advanced functionalities and robust performance. Key features of this evaluation kit include a yellow user LED and a responsive mechanical user switch
providing seamless interaction and testing. The provision for a 32.768kHz crystal footprint ensures precision timing capabilities. With an onboard debugger boasting a green power and status LED, programming and debugging become intuitive and efficient. Further enhancing its utility is the Virtual serial port (CDC) and a debug GPIO channel (DGI GPIO), offering extensive connectivity options.
Powered via USB, this kit boasts an adjustable target voltage feature facilitated by the MIC5353 LDO regulator, ensuring stable operation with an output voltage ranging from 2.3V to 5.1V (limited by USB input voltage), with a maximum output current of 500mA, subject to ambient temperature and voltage constraints.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
40
RAM (Bytes)
8192
You complete me!
Accessories
Curiosity Nano Base for Click boards is a versatile hardware extension platform created to streamline the integration between Curiosity Nano kits and extension boards, tailored explicitly for the mikroBUS™-standardized Click boards and Xplained Pro extension boards. This innovative base board (shield) offers seamless connectivity and expansion possibilities, simplifying experimentation and development. Key features include USB power compatibility from the Curiosity Nano kit, alongside an alternative external power input option for enhanced flexibility. The onboard Li-Ion/LiPo charger and management circuit ensure smooth operation for battery-powered applications, simplifying usage and management. Moreover, the base incorporates a fixed 3.3V PSU dedicated to target and mikroBUS™ power rails, alongside a fixed 5.0V boost converter catering to 5V power rails of mikroBUS™ sockets, providing stable power delivery for various connected devices.

DC Gear Motor - 430RPM (3-6V) represents an all-in-one combination of a motor and gearbox, where the addition of gear leads to a reduction of motor speed while increasing the torque output. This gear motor has a spur gearbox, making it a highly reliable solution for applications with lower torque and speed requirements. The most critical parameters for gear motors are speed, torque, and efficiency, which are, in this case, 520RPM with no load and 430RPM at maximum efficiency, alongside a current of 60mA and a torque of 50g.cm. Rated for a 3-6V operational voltage range and clockwise/counterclockwise rotation direction, this motor represents an excellent solution for many functions initially performed by brushed DC motors in robotics, medical equipment, electric door locks, and much more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
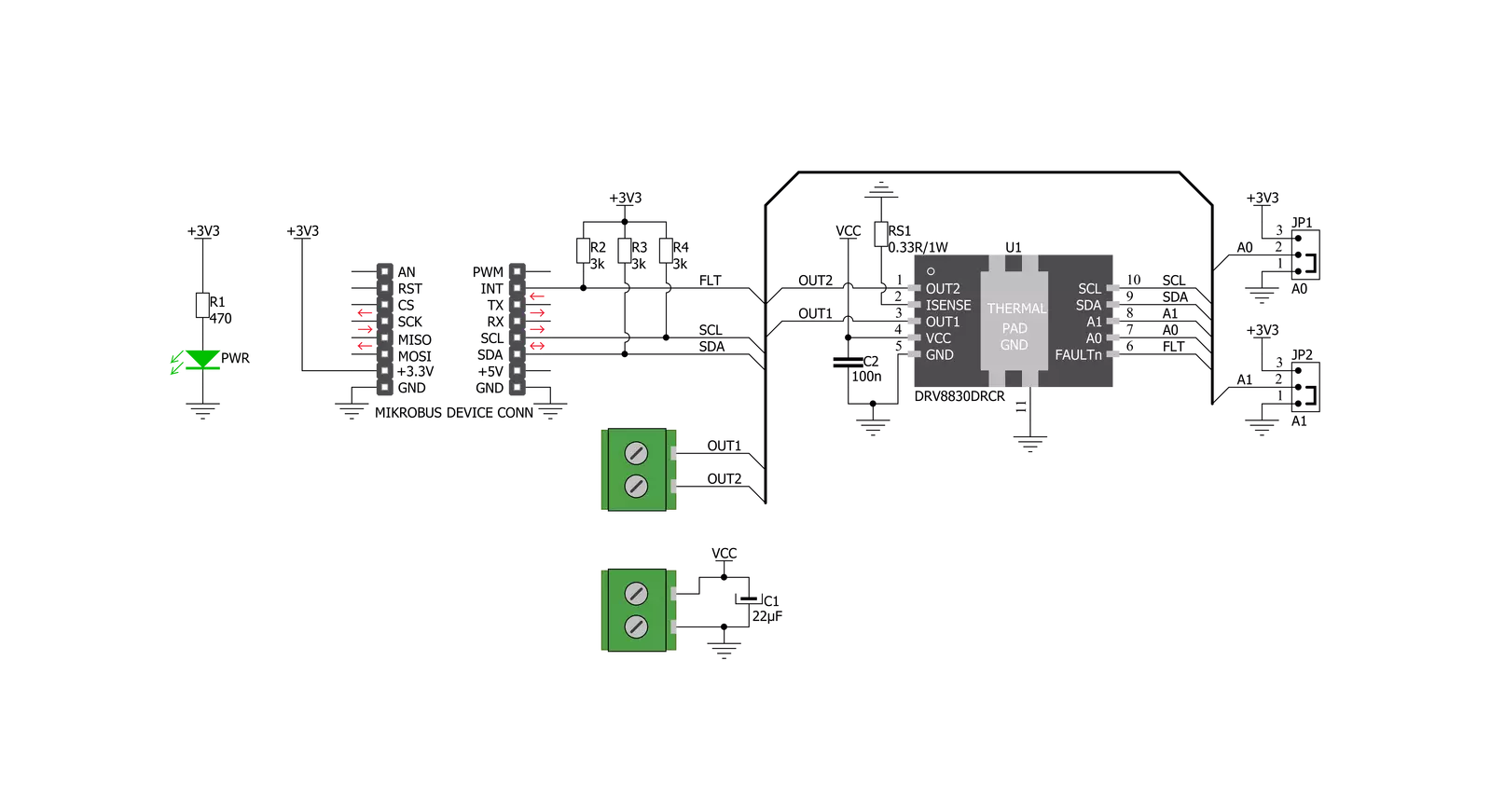
Click board™ Schematic
Step by step
Project assembly
Start by selecting your development board and Click board™. Begin with the Curiosity Nano with PIC18F47K42 as your development board.















Software Support
Library Description
This library contains API for DC Motor 11 Click driver.
Key functions:
dcmotor11_control- Motor Controldcmotor11_get_fault- Get Faultdcmotor11_get_interrupt_state- Interrupt state on the INT pin
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief DcMotor11 Click example
*
* # Description
* This application is motor driver with the current limiting and current sensing.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver init and sets first motor settings.
*
* ## Application Task
* Waits for valid user input and executes functions based on set of valid commands.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "dcmotor11.h"
// ------------------------------------------------------------------ VARIABLES
static dcmotor11_t dcmotor11;
static log_t logger;
uint8_t motor_speed;
uint8_t motor_dir;
uint8_t f_motor_state = 1;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
dcmotor11_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
dcmotor11_cfg_setup( &cfg );
DCMOTOR11_MAP_MIKROBUS( cfg, MIKROBUS_1 );
dcmotor11_init( &dcmotor11, &cfg );
dcmotor11_get_fault( &dcmotor11 );
// Start settings
motor_dir = DCMOTOR11_DIRECTION_FORWARD;
motor_speed = DCMOTOR11_VSET_480mV;
dcmotor11_control( &dcmotor11, DCMOTOR11_DIRECTION_FORWARD, motor_speed );
}
void application_task ( void )
{
// Speed increase
motor_speed += 4;
if ( motor_speed >= DCMOTOR11_VSET_4820mV )
{
log_printf( &logger, "---- MAX SPEED ---- \r\n" );
motor_speed = DCMOTOR11_VSET_4820mV;
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
else
{
log_printf( &logger, "---- Speed increase ---- \r\n" );
log_printf( &logger, " MOTOR SPEED: %d \r\n", motor_speed );
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
// Speed decrease
motor_speed -= 4;
if ( motor_speed < DCMOTOR11_VSET_480mV )
{
log_printf( &logger, "---- MIN SPEED ---- \r\n" );
motor_speed = DCMOTOR11_VSET_480mV;
}
else
{
log_printf( &logger, "---- Speed decrease ---- \r\n");
log_printf( &logger, " MOTOR SPEED: %d \r\n", motor_speed );
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
// Stop / Start
if( f_motor_state == 1 )
{
log_printf( &logger,"---- Stop Motor!!! ---- \r\n" );
f_motor_state = 0;
dcmotor11_stop( &dcmotor11 );
}
else
{
log_printf( &logger,"---- Start Motor ---- \r\n" );
f_motor_state = 1;
motor_speed = DCMOTOR11_VSET_480mV;
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
// Direction - Forward / Backword
if ( motor_dir == 2 )
{
log_printf( &logger,"---- Direction - [FORWARD] ---- \r\n" );
motor_dir = 1;
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
else
{
log_printf( &logger,"---- Direction - [BACKWARD] ---- \r\n" );
motor_dir = 2;
dcmotor11_control( &dcmotor11, motor_dir, motor_speed );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushed