Achieve real-time monitoring and control in automotive and industrial settings with ATA663211 and ATmega328
The future of low-speed data communication with LIN transceivers

Published Feb 14, 2024
Click board™
ATA663211 Click
Dev. board
Arduino UNO Rev3
Compiler
NECTO Studio
MCU
ATmega328
Our LIN transceiver empowers vehicles and industrial systems to efficiently exchange critical data at low speeds, ensuring seamless communication
A
A
Hardware Overview
How does it work?
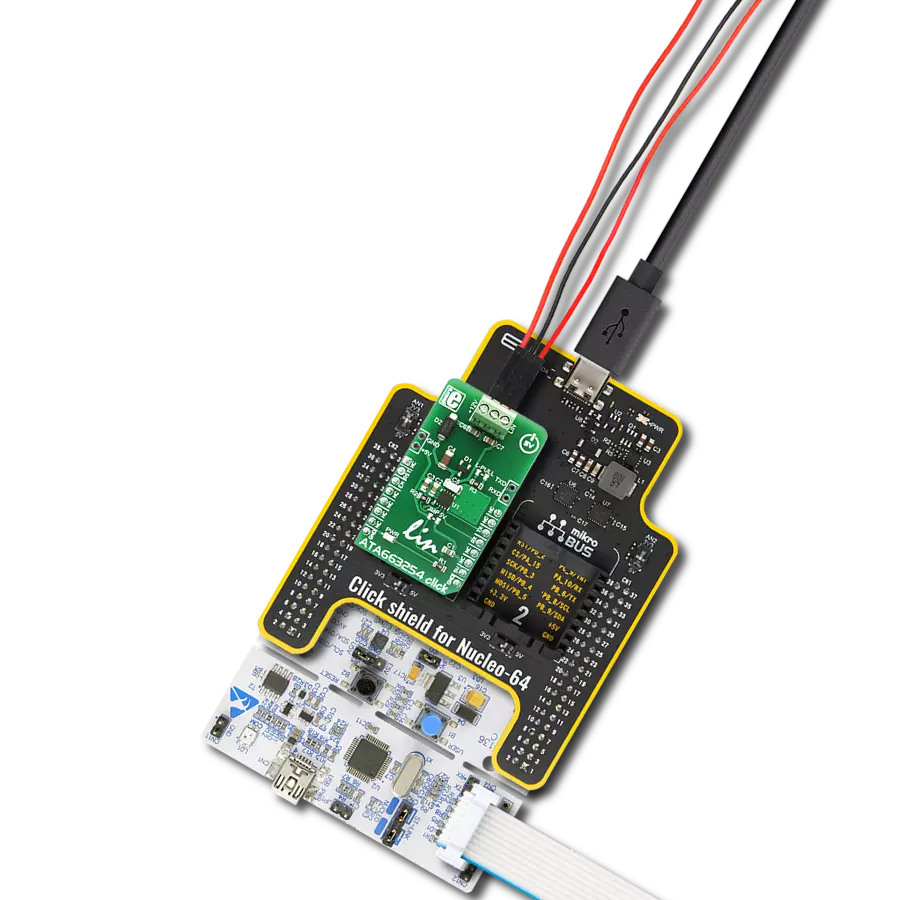
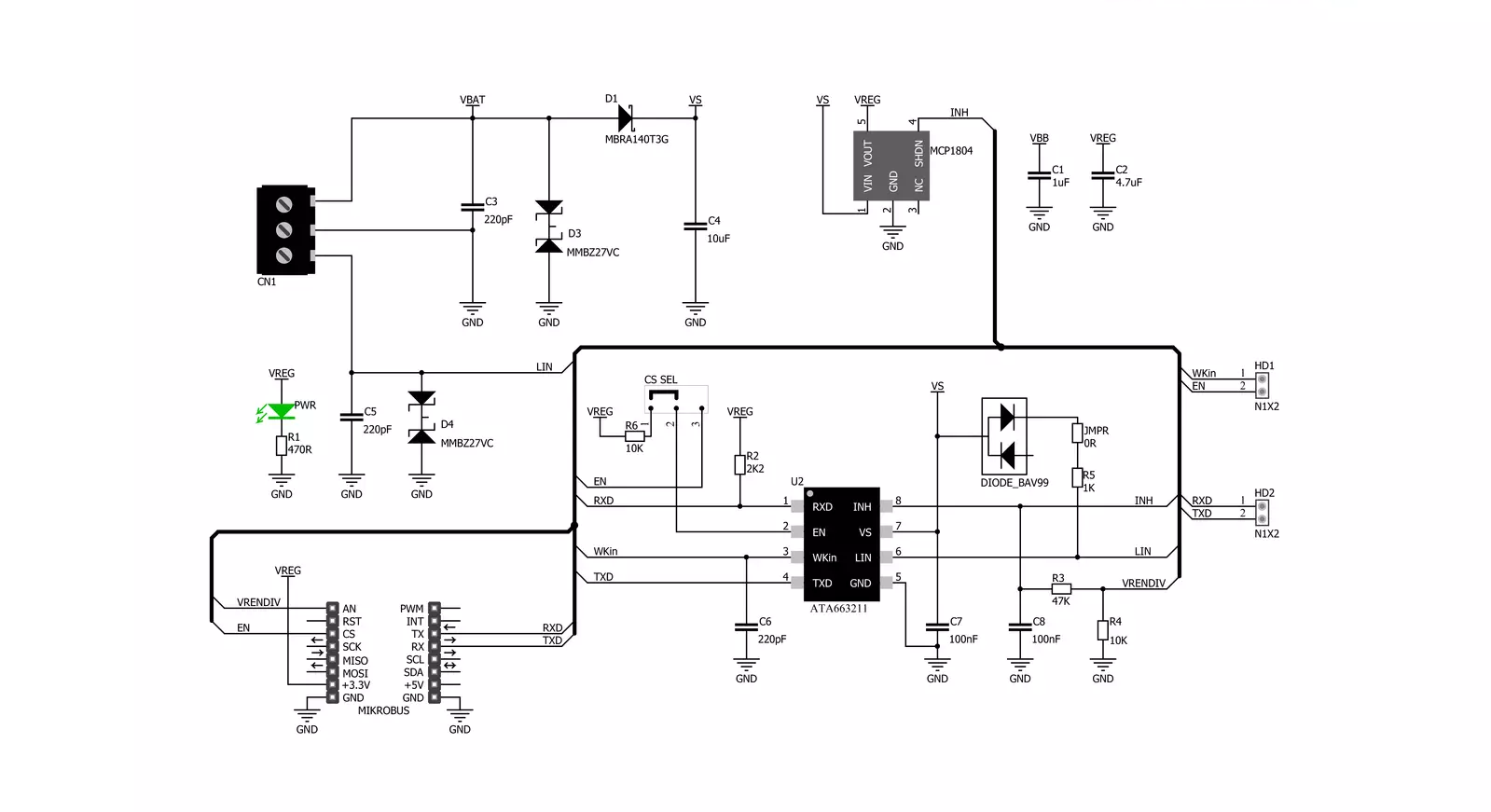
ATA663211 Click is based on the ATA663211, a LIN transceiver from Microchip. It features several protection functionalities, such as over-temperature, short-circuit protection vs. GND and battery, advanced EMC and ESD, and more. The integrated 3.3V onboard LDO voltage regulator is the MCP1804, an LDO regulator with shutdown from Microchip. The combination of a voltage regulator and a bus transceiver makes it possible to develop simple but powerful slave nodes in LIN bus systems. This way, ATA663211 Click can be used as a standalone LIN transceiver without being connected to a mikroBUS™ socket. An onboard LDO (low-dropout regulator) lets it supply power through the VS line screw terminal. This regulated voltage is also available on the +3.3V rail of the mikroBUS™ socket to power up the 3.3V attached host MCU. There are several operating modes for the ATA663211 Click. In Normal mode, the LIN interface is transmitting and receiving. In Sleep mode, the transmission path is disabled, and the LIN transceiver is in low-power mode. The Failsafe mode is automatically switched at system power-up or after a wake-up event. The LIN transceiver
is switched off in this mode, and the inhibit output pin is switched on. For the typical application as a Master node, the ATA663211 requires the LBUS line of the chip to be connected to the VBB of the LIN BUS, achievable via a populated L-PULL jumper. This jumper can be removed in other scenarios, such as the LIN Slave node. The ATA663211 communicates with the MCU using the UART RX and TX signals. Besides communication, these pins also serve to signal the failsafe condition. The undervoltage on the LIN connector can cause the failsafe condition: less than 3.9V will cause the undervoltage condition, signaled by the LOW logic state on the RX pin and the HIGH logic state on the TX pin. A LIN wake-up event from either silent or sleep mode is signaled by the LOW logic state on both the RX and TX pins. This event is received via the LIN bus and is used to switch the ATA663211 click to an active state. On the other hand, Low on TX and HIGH on RX will signal the local wake-up. RX and TX signals are also routed to the header on the edge of the Click board™ so they can be used independently of the mikroBUS™ socket. The inhibit output pin of the LIN transceiver is used
to control the Shutdown input of the MCP1804 LDO; thus, the supply pin of the LIN transceiver itself, as the LDO, supplies the LIN transceiver supply pin with LIN operating voltage. The voltages on this line can be monitored over the INH pin of the mikroBUS™ socket via the resistor divider. To enable the LIN transceiver, there is an EN SEL jumper set to the HI position by default, thus enabling the transceiver. Setting it to the LOW position allows you to control the enable function over the EN pin of the mikroBUS™ socket. In addition, this same pin is routed to the second pair of headers to enable the LIN transceiver externally. The other pin on this header is WKin, a high-voltage input for waking up the device. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Arduino UNO is a versatile microcontroller board built around the ATmega328P chip. It offers extensive connectivity options for various projects, featuring 14 digital input/output pins, six of which are PWM-capable, along with six analog inputs. Its core components include a 16MHz ceramic resonator, a USB connection, a power jack, an
ICSP header, and a reset button, providing everything necessary to power and program the board. The Uno is ready to go, whether connected to a computer via USB or powered by an AC-to-DC adapter or battery. As the first USB Arduino board, it serves as the benchmark for the Arduino platform, with "Uno" symbolizing its status as the
first in a series. This name choice, meaning "one" in Italian, commemorates the launch of Arduino Software (IDE) 1.0. Initially introduced alongside version 1.0 of the Arduino Software (IDE), the Uno has since become the foundational model for subsequent Arduino releases, embodying the platform's evolution.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
32
RAM (Bytes)
2048
You complete me!
Accessories
Click Shield for Arduino UNO has two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the Arduino UNO board without effort. The Arduino Uno, a microcontroller board based on the ATmega328P, provides an affordable and flexible way for users to try out new concepts and build prototypes with the ATmega328P microcontroller from various combinations of performance, power consumption, and features. The Arduino Uno has 14 digital input/output pins (of which six can be used as PWM outputs), six analog inputs, a 16 MHz ceramic resonator (CSTCE16M0V53-R0), a USB connection, a power jack, an ICSP header, and reset button. Most of the ATmega328P microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the Arduino UNO board with our Click Shield for Arduino UNO, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Arduino UNO Rev3 as your development board.















Software Support
Library Description
This library contains API for ATA663211 Click driver.
Key functions:
ata663211_generic_write- Generic write functionata663211_generic_read- Generic read function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Ata663211 Click example
*
* # Description
* This example demonstrates the use of an ATA663211 Click board by showing
* the communication between the two Click boards.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initalizes device and makes an initial log.
*
* ## Application Task
* Depending on the selected application mode, it reads all the received data or
* sends the desired text message with the message counter once per second.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "ata663211.h"
// ------------------------------------------------------------------ VARIABLES
// Comment out the line below in order to switch the application mode to receiver
#define DEMO_APP_TRANSMITTER
// Text message to send in the transmitter application mode
#define DEMO_TEXT_MESSAGE "MIKROE - ATA663211 Click board\r\n\0"
static ata663211_t ata663211;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
ata663211_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
ata663211_cfg_setup( &cfg );
ATA663211_MAP_MIKROBUS( cfg, MIKROBUS_1 );
ata663211_init( &ata663211, &cfg );
#ifdef DEMO_APP_TRANSMITTER
log_printf( &logger, " Application Mode: Transmitter\r\n" );
#else
log_printf( &logger, " Application Mode: Receiver\r\n" );
#endif
}
void application_task ( void )
{
#ifdef DEMO_APP_TRANSMITTER
ata663211_generic_write( &ata663211, DEMO_TEXT_MESSAGE, strlen( DEMO_TEXT_MESSAGE ) );
log_printf( &logger, "%s", ( char * ) DEMO_TEXT_MESSAGE );
Delay_ms ( 1000 );
#else
uint8_t rx_byte = 0;
if ( 1 == ata663211_generic_read( &ata663211, &rx_byte, 1 ) )
{
log_printf( &logger, "%c", rx_byte );
}
#endif
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:LIN