Empower your system with a high-speed CAN transceiver thanks to the TLE9255W and ATmega328P
Connect, Control, Create with CAN
Published Feb 14, 2024
Click board™
CAN FD 2 Click
Dev. board
Arduino UNO Rev3
Compiler
NECTO Studio
MCU
ATmega328P
Accelerate your automotive diagnostics with our state-of-the-art high-speed CAN FD transceiver
A
A
Hardware Overview
How does it work?
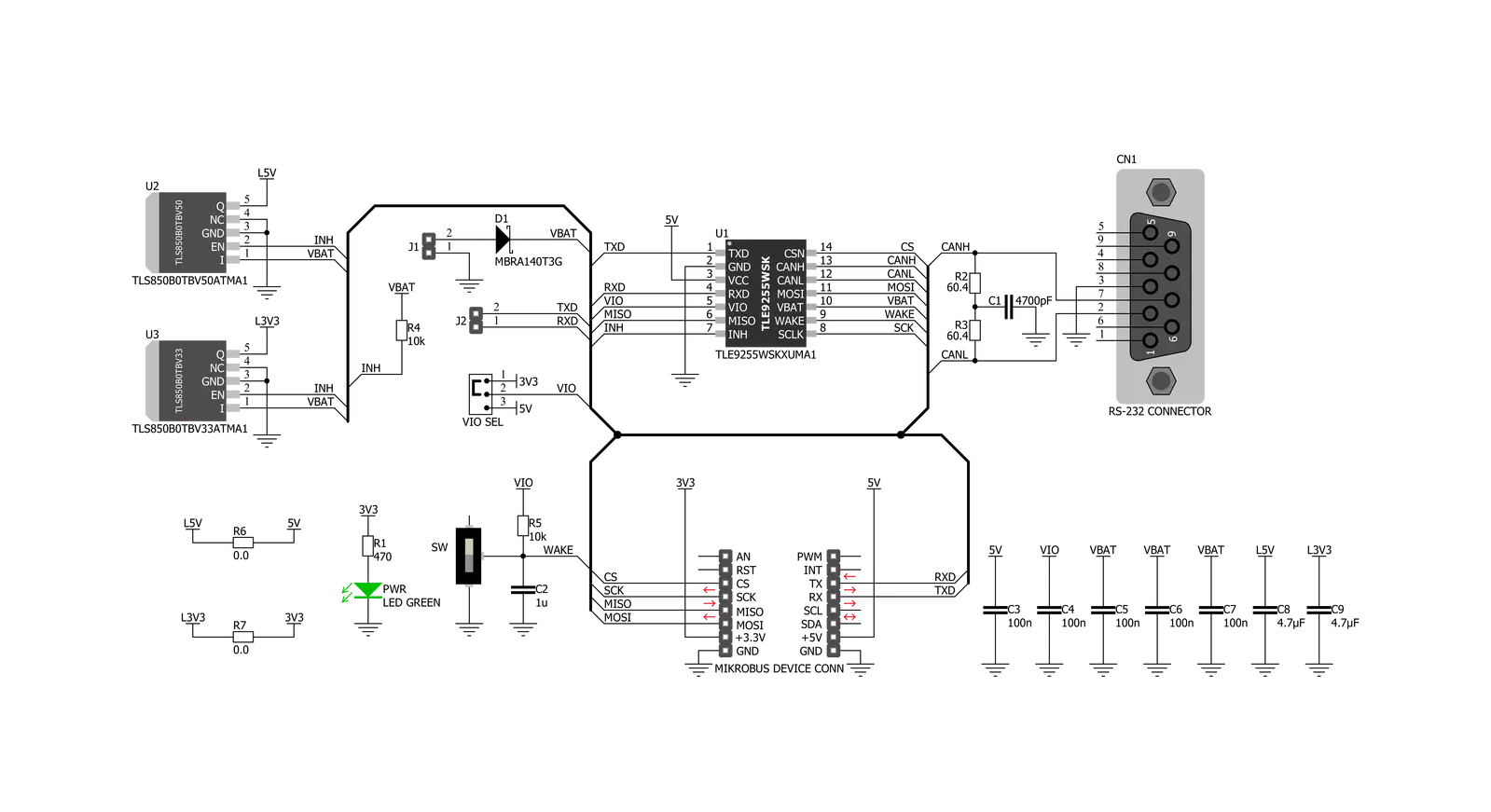
CAN FD 2 Click is based on the TLE9255W, a standard HS CAN transceiver from Infineon that provides CAN partial networking functions also a CAN FD capability of up to 5 MBit/s in HS CAN networks. Configured as a partial networking HS CAN transceiver, the TLE9255W can drive and receive CAN FD messages. It can also be used to block the payload of CAN FD messages. This CAN FD tolerant feature allows the usage of microcontrollers in CAN FD networks that are not CAN FD capable. The two non-low power modes (Normal-operating Mode and Receive-only Mode) and the two low power modes (Sleep Mode and Stand-by Mode) provide minimum current consumption based on the required functionality. The SPI of TLE9255W controls the setup of the wake-up messages and the status message generated by the internal state machine. Most functions, including wake-up functions, INH
output control, mode control, and Undervoltage control, are configurable by the SPI. This allows a very flexible usage of the TLE9255W in different applications. High-speed CAN (HS CAN) is a serial bus system that connects microcontrollers, sensors, and actuators for real-time control applications. ISO 11898-2 (2016) describes using the Controller Area Network (CAN) within road vehicles. According to the 7-layer OSI reference model, the physical layer of an HS CAN bus system specifies the data transmission from one CAN node to all other available CAN nodes within the network. The CAN transceiver is part of the physical layer. The HS CAN transceiver TLE9255W includes a receiver and a transmitter unit, allowing the transceiver to send data to the bus medium and monitor the data from the bus medium simultaneously. It converts the serial data stream, available on the transmit data input TxD, to a
differential output signal on the CAN bus provided by the CANH and CANL pins. The receiver stage of the TLE9255W monitors the data on the CAN bus and converts it to a serial, single-ended signal on the RxD output pin. Given all the features its components offer, the CAN FD 2 Click is best used for HS CAN networks in automotive applications and HS CAN networks in industrial applications. The onboard SMD jumper labeled the VIO SEL selects which voltage rail will be used as the logic voltage level. It offers voltage selection between 3.3V and 5V so that the click board™ can be interfaced with both the 3.3V and 5V capable MCUs. The two UART wires (RX and TX) can also be connected directly through two pins to UART External Pads on the board's left edge. With R6 and R7 jumpers populated allows you to use this board with a standard 12V battery connected to the Battery Pads at the right side of the board.

Features overview
Development board
Arduino UNO is a versatile microcontroller board built around the ATmega328P chip. It offers extensive connectivity options for various projects, featuring 14 digital input/output pins, six of which are PWM-capable, along with six analog inputs. Its core components include a 16MHz ceramic resonator, a USB connection, a power jack, an
ICSP header, and a reset button, providing everything necessary to power and program the board. The Uno is ready to go, whether connected to a computer via USB or powered by an AC-to-DC adapter or battery. As the first USB Arduino board, it serves as the benchmark for the Arduino platform, with "Uno" symbolizing its status as the
first in a series. This name choice, meaning "one" in Italian, commemorates the launch of Arduino Software (IDE) 1.0. Initially introduced alongside version 1.0 of the Arduino Software (IDE), the Uno has since become the foundational model for subsequent Arduino releases, embodying the platform's evolution.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
2048
You complete me!
Accessories
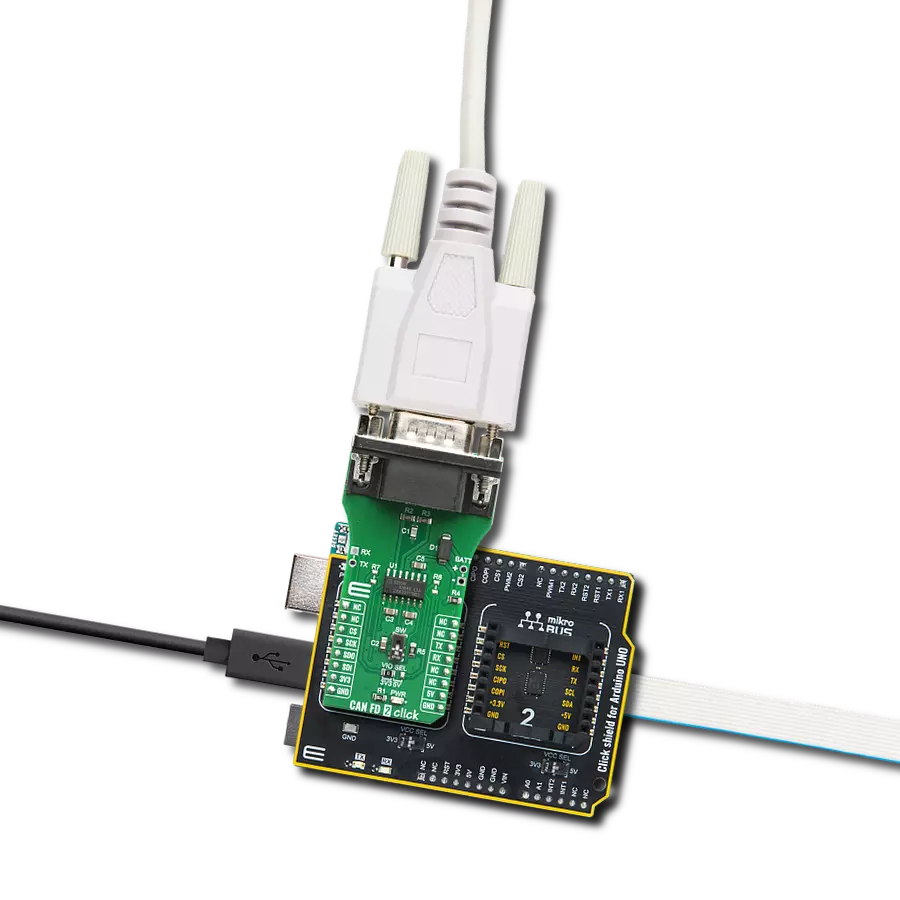
Click Shield for Arduino UNO has two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the Arduino UNO board without effort. The Arduino Uno, a microcontroller board based on the ATmega328P, provides an affordable and flexible way for users to try out new concepts and build prototypes with the ATmega328P microcontroller from various combinations of performance, power consumption, and features. The Arduino Uno has 14 digital input/output pins (of which six can be used as PWM outputs), six analog inputs, a 16 MHz ceramic resonator (CSTCE16M0V53-R0), a USB connection, a power jack, an ICSP header, and reset button. Most of the ATmega328P microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the Arduino UNO board with our Click Shield for Arduino UNO, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

DB9 Cable Female-to-Female (2m) cable is essential for establishing dependable serial data connections between devices. With its DB9 female connectors on both ends, this cable enables a seamless link between various equipment, such as computers, routers, switches, and other serial devices. Measuring 2 meters in length, it offers flexibility in arranging your setup without compromising data transmission quality. Crafted with precision, this cable ensures consistent and reliable data exchange, making it suitable for industrial applications, office environments, and home setups. Whether configuring networking equipment, accessing console ports, or utilizing serial peripherals, this cable's durable construction and robust connectors guarantee a stable connection. Simplify your data communication needs with the 2m DB9 female-to-female cable, an efficient solution designed to meet your serial connectivity requirements easily and efficiently.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Arduino UNO Rev3 as your development board.















Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for CAN FD 2 Click driver.
Key functions:
canfd2_generic_read- Generic read functioncanfd2_write_data- Generic write the byte of data functioncanfd2_get_mode- Get operating mode function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief CanFd2 Click example
*
* # Description
* This example reads and processes data from CAN FD 2 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and configures the Click board for the selected mode.
*
* ## Application Task
* Depending on the selected mode, it reads all the received data or sends the desired message
* every 2 seconds.
*
* ## Additional Function
* - static void canfd2_clear_app_buf ( void )
* - static err_t canfd2_process ( canfd2_t *ctx )
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "canfd2.h"
#include "string.h"
// Comment out the line below in order to switch the application mode to receiver
#define DEMO_APP_TRANSMITTER
// Text message to send in the transmitter application mode
#define DEMO_TEXT_MESSAGE "MIKROE - CAN FD 2 Click board\r\n\0"
#define PROCESS_BUFFER_SIZE 200
static canfd2_t canfd2;
static log_t logger;
static uint8_t app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
/**
* @brief CAN FD 2 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @note None.
*/
static void canfd2_clear_app_buf ( void );
/**
* @brief CAN FD 2 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #canfd2_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t canfd2_process ( canfd2_t *ctx );
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
canfd2_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
canfd2_cfg_setup( &cfg );
CANFD2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
canfd2_init( &canfd2, &cfg );
CANFD2_SET_DATA_SAMPLE_EDGE;
Delay_ms ( 100 );
#ifdef DEMO_APP_TRANSMITTER
canfd2_set_mode( &canfd2, CANFD2_OP_MODE_NORMAL );
if ( CANFD2_OP_MODE_NORMAL == canfd2_get_mode ( &canfd2 ) )
{
log_info( &logger, "--- TRANSMITTER MODE ---" );
}
else
{
log_info( &logger, "--- ERROR ---" );
log_printf( &logger, "Please restart your system.\r\n" );
for ( ; ; );
}
#else
canfd2_set_mode( &canfd2, CANFD2_OP_MODE_RECEIVE_ONLY );
if ( CANFD2_OP_MODE_RECEIVE_ONLY == canfd2_get_mode ( &canfd2 ) )
{
log_info( &logger, "--- RECEIVER MODE ---" );
}
else
{
log_info( &logger, "--- ERROR ---" );
log_printf( &logger, "Please restart your system.\r\n" );
for ( ; ; );
}
#endif
Delay_ms ( 100 );
}
void application_task ( void )
{
#ifdef DEMO_APP_TRANSMITTER
canfd2_generic_write( &canfd2, DEMO_TEXT_MESSAGE, strlen ( DEMO_TEXT_MESSAGE ) );
log_info( &logger, "--- The message is sent ---" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
#else
canfd2_process( &canfd2 );
if ( app_buf_len > 0 )
{
Delay_ms ( 100 );
canfd2_process ( &canfd2 );
log_printf( &logger, "Received data: %s", app_buf );
canfd2_clear_app_buf( );
}
#endif
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void canfd2_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static err_t canfd2_process ( canfd2_t *ctx )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t rx_size = 0;
rx_size = canfd2_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = app_buf_len;
if ( ( ( app_buf_len + rx_size ) > PROCESS_BUFFER_SIZE ) && ( app_buf_len > 0 ) )
{
buf_cnt = PROCESS_BUFFER_SIZE - ( ( app_buf_len + rx_size ) - PROCESS_BUFFER_SIZE );
memmove ( app_buf, &app_buf[ PROCESS_BUFFER_SIZE - buf_cnt ], buf_cnt );
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ buf_cnt++ ] = rx_buf[ rx_cnt ];
if ( app_buf_len < PROCESS_BUFFER_SIZE )
{
app_buf_len++;
}
}
}
return CANFD2_OK;
}
return CANFD2_ERROR;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:CAN