Convert analog to digital signals with AD7091R and ATmega2560 with additional electrical isolation between them
Isolate and digitize with precision

Published Feb 14, 2024
Click board™
ISO ADC 2 Click
Dev. board
Arduino Mega 2560 Rev3
Compiler
NECTO Studio
MCU
ATmega2560
Unleash the power of isolation with our cutting-edge A/D converter!
A
A
Hardware Overview
How does it work?
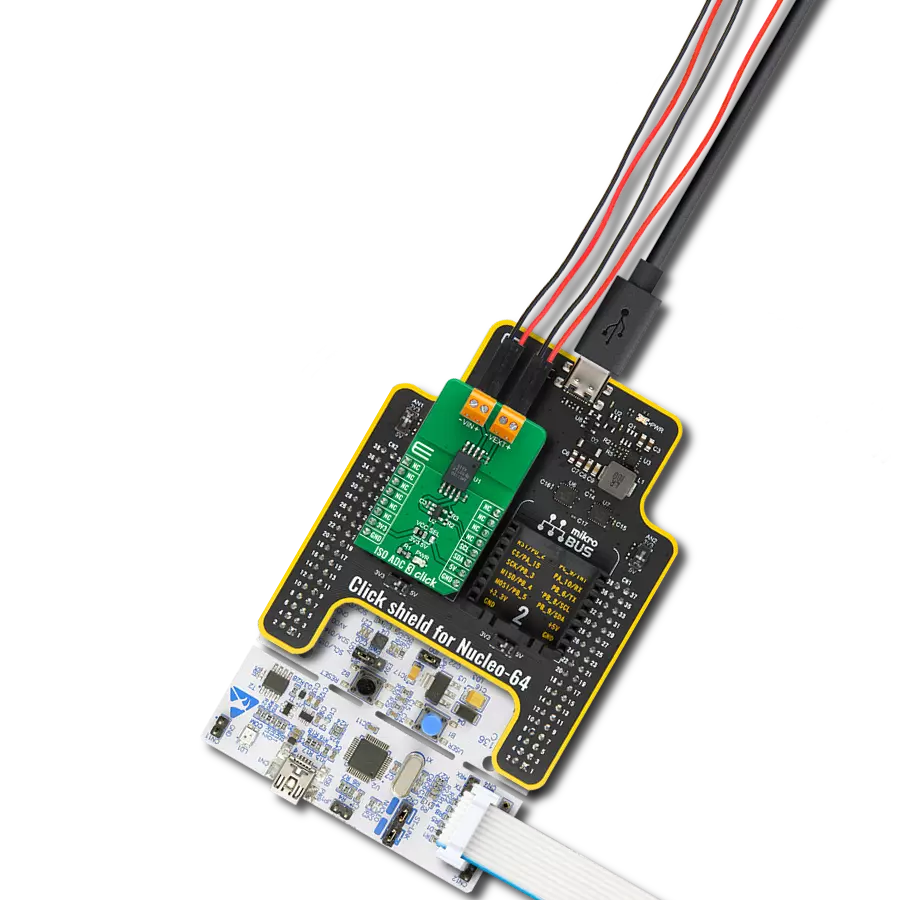
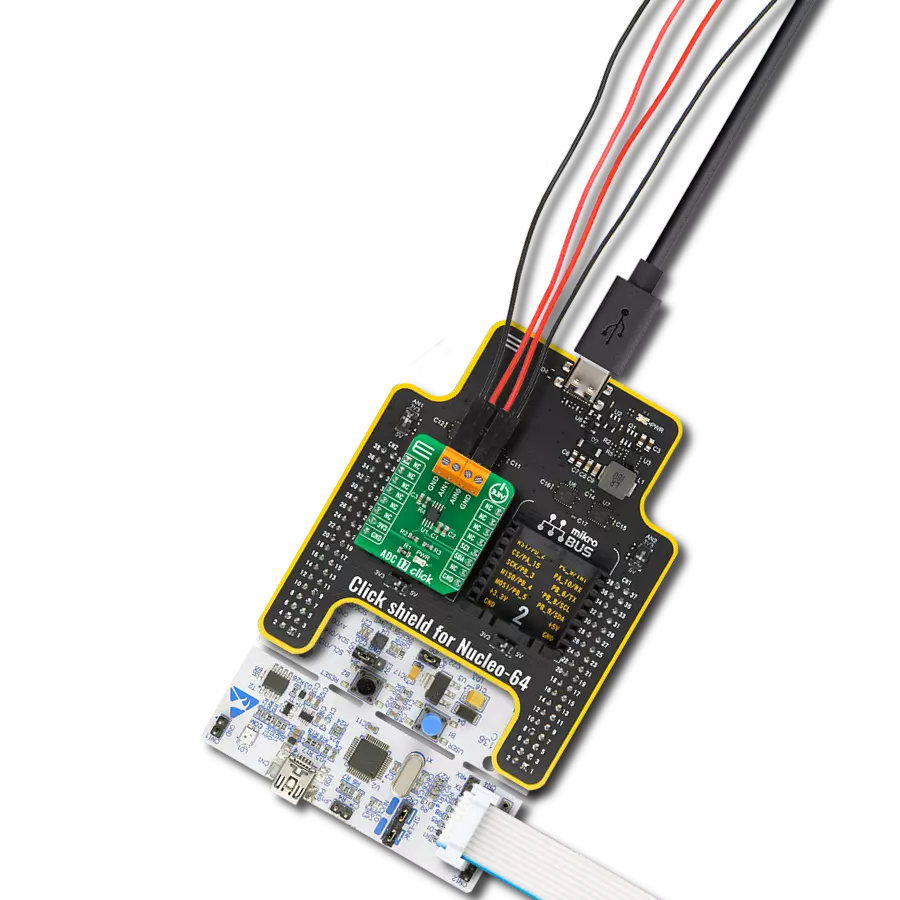
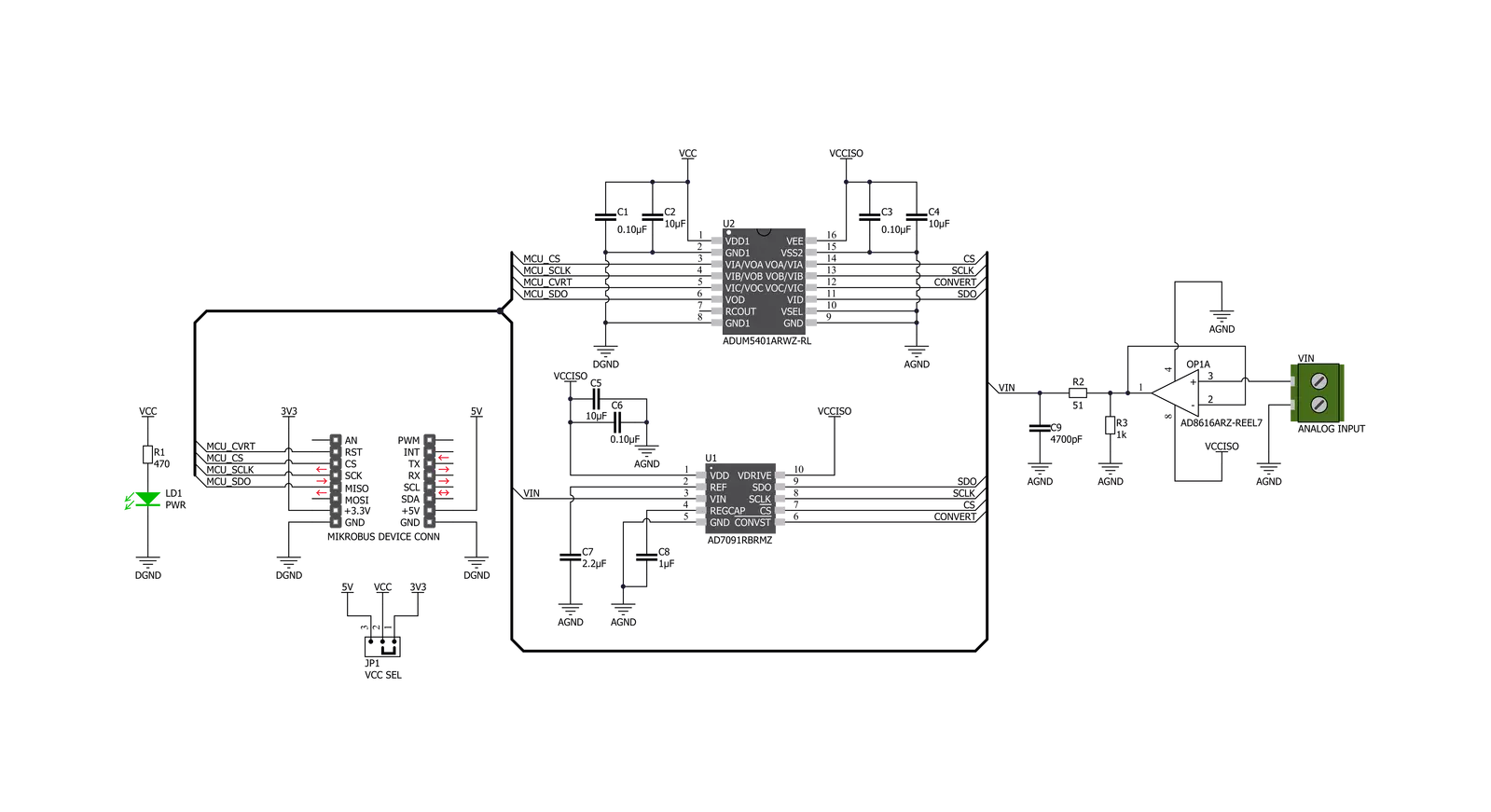
ISO ADC 2 Click is based on the AD7091R, a 12-bit successive-approximation analog-to-digital converter (ADC) with an isolated DC-DC converter from Analog Devices. This Click board™ allows single-supply operation and consists of active Analog Devices components: AD8616, a level shifting circuit; AD7091R, an ADC stage; and ADuM5401, an output isolation stage. The AD8616 is chosen for this application because of its low offset voltage, low bias current, and low noise. The output of the OpAmp is 0.1V to 2.4V, which matches the input range of the ADC (0V to 2.5V) with a 100mV safety margin to maintain linearity. A single-pole RC filter (R2/C9) follows the OpAmp output stage to reduce the out-of-band noise. The next part of the circuit is the AD7091R, ADC chosen because of its
ultralow power, which is significantly lower than any competitive A/D converter. It features a power-down option, implemented across the serial interface to save power between conversions, described in the Modes of Operation section in the datasheet. After a successful conversion, the ADC sends the data to the MCU through galvanic isolation provided by the ADuM5401 quad-channel digital isolator with an integrated DC-DC converter. The isolator has a secondary side controller architecture with isolated pulse-width modulation (PWM) feedback, and it works on the principle common to most switching power supplies. The ISO ADC 2 Click communicates with MCU using the 3-wire SPI serial interface that operates at clock rates up to 50MHz used for accessing data from the result register
and controlling the device's modes of operation. The CONVST signal of the AD7091R routed to the RST pin on the mikroBUS™ is used to initiate the conversion process, data acquisition, and select the operation mode. This ADC requires the user to initiate a software reset upon Power-Up, and it should be noted that failure to apply the correct software reset command may result in a device malfunction. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.



Features overview
Development board
Arduino Mega 2560 is a robust microcontroller platform built around the ATmega 2560 chip. It has extensive capabilities and boasts 54 digital input/output pins, including 15 PWM outputs, 16 analog inputs, and 4 UARTs. With a 16MHz crystal
oscillator ensuring precise timing, it offers seamless connectivity via USB, a convenient power jack, an ICSP header, and a reset button. This all-inclusive board simplifies microcontroller projects; connect it to your computer via USB or power it up
using an AC-to-DC adapter or battery. Notably, the Mega 2560 maintains compatibility with a wide range of shields crafted for the Uno, Duemilanove, or Diecimila boards, ensuring versatility and ease of integration.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
256
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
8192
You complete me!
Accessories
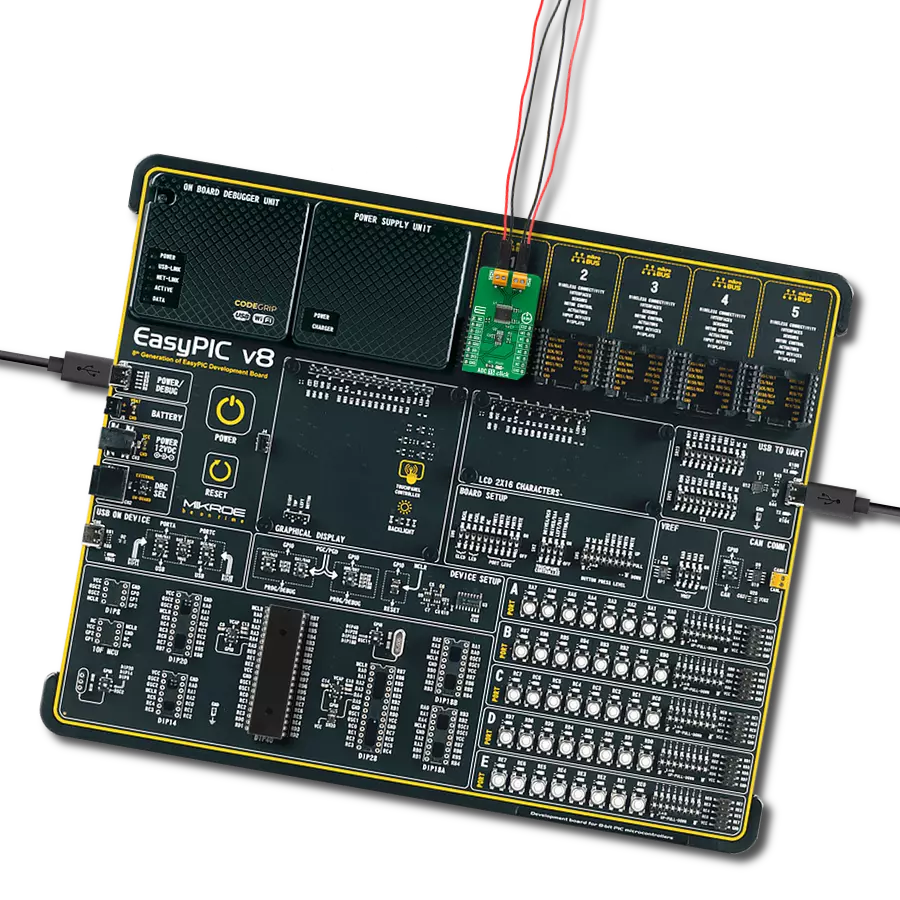
Click Shield for Arduino Mega comes equipped with four mikroBUS™ sockets, with two in the form of a Shuttle connector, allowing all the Click board™ devices to be interfaced with the Arduino Mega board with no effort. Featuring an AVR 8-bit microcontroller with advanced RISC architecture, 54 digital I/O pins, and Arduino™ compatibility, the Arduino Mega board offers limitless possibilities for prototyping and creating diverse applications. This board is controlled and powered conveniently through a USB connection to program and debug the Arduino Mega board efficiently out of the box, with an additional USB cable connected to the USB B port on the board. Simplify your project development with the integrated ATmega16U2 programmer and unleash creativity using the extensive I/O options and expansion capabilities. There are eight switches, which you can use as inputs, and eight LEDs, which can be used as outputs of the MEGA2560. In addition, the shield features the MCP1501, a high-precision buffered voltage reference from Microchip. This reference is selected by default over the EXT REF jumper at the bottom of the board. You can choose an external one, as you would usually do with an Arduino Mega board. There is also a GND hook for testing purposes. Four additional LEDs are PWR, LED (standard pin D13), RX, and TX LEDs connected to UART1 (mikroBUS™ 1 socket). This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the Arduino Mega board with Click Shield for Arduino Mega, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Arduino Mega 2560 Rev3 as your development board.















Software Support
Library Description
This library contains API for ISO ADC 2 Click driver.
Key functions:
uint16_t isoadc2_read_adc ( void )Function for reading 12bit ADC datauint16_t isoadc2_get_mv ( uint16_t adc_data )Function for converting ADC to mV data
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief IsoAdc2 Click example
*
* # Description
* This is an example that demonstrates the use of the ISO ADC 2 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of SPI module and additional GPIO pins.
*
* ## Application Task
* Every second reads ADC data and voltage in mV and logs result.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "isoadc2.h"
static isoadc2_t isoadc2;
static log_t logger;
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
isoadc2_cfg_t isoadc2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
isoadc2_cfg_setup( &isoadc2_cfg );
ISOADC2_MAP_MIKROBUS( isoadc2_cfg, MIKROBUS_1 );
err_t init_flag = isoadc2_init( &isoadc2, &isoadc2_cfg );
if ( SPI_MASTER_ERROR == init_flag ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void ) {
uint16_t rx_data;
uint16_t mv_data;
isoadc2_read_adc( &isoadc2, &rx_data );
Delay_ms ( 100 );
isoadc2_get_mv( &isoadc2, &mv_data );
log_printf( &logger, " ADC: %d \r\n", rx_data );
log_printf( &logger, " VIN: %d mV\r\n", mv_data );
log_printf( &logger, "---------------\r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:ADC