Make a unique navigation solution with L80 and STM32L496AG
Easily chart your course with utmost simplicity
Published Jul 22, 2025
Click board™
GPS3 Click
Dev. board
Discovery kit with STM32L496AG MCU
Compiler
NECTO Studio
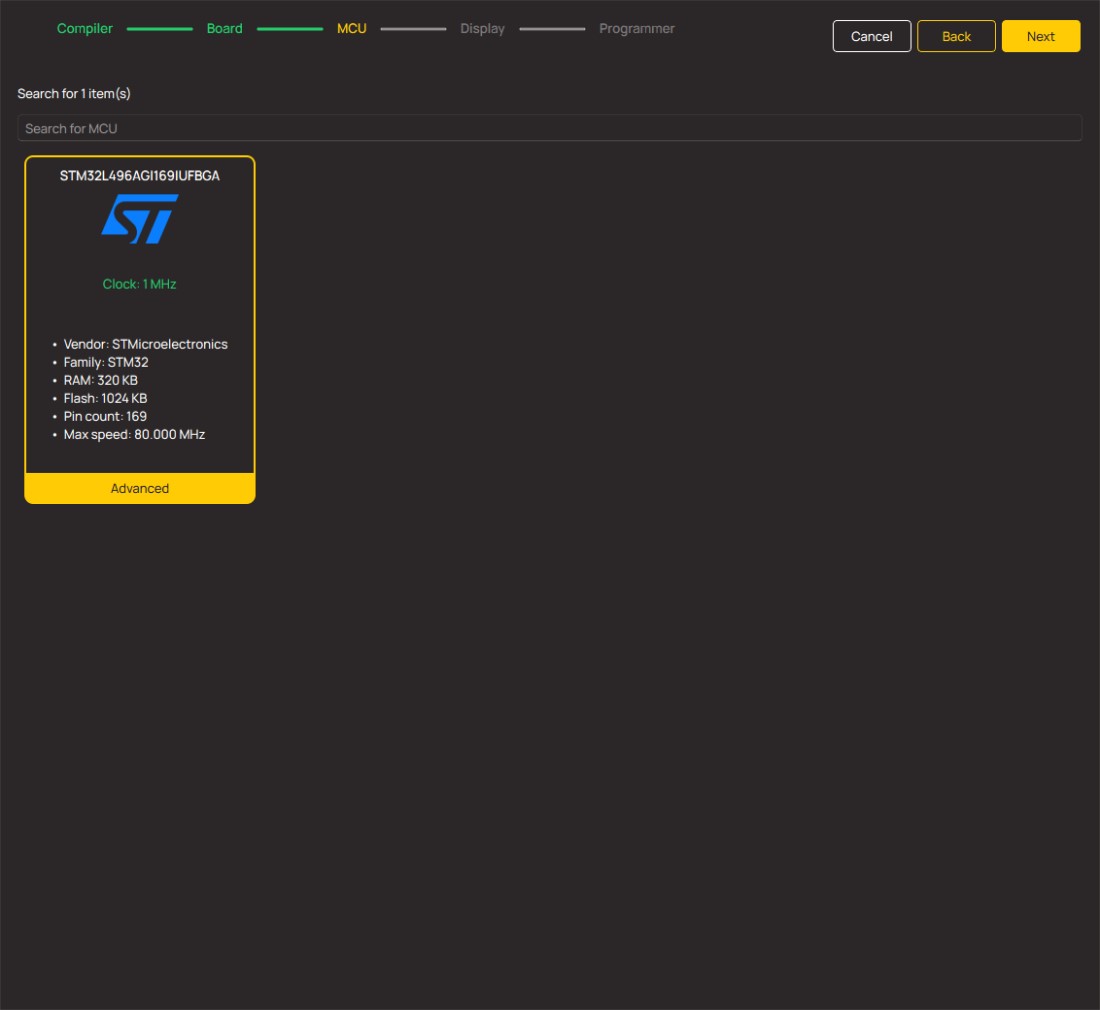
MCU
STM32L496AG
Unleash the boundless potential of navigation technology, revolutionizing the way people explore and navigate
A
A
Hardware Overview
How does it work?
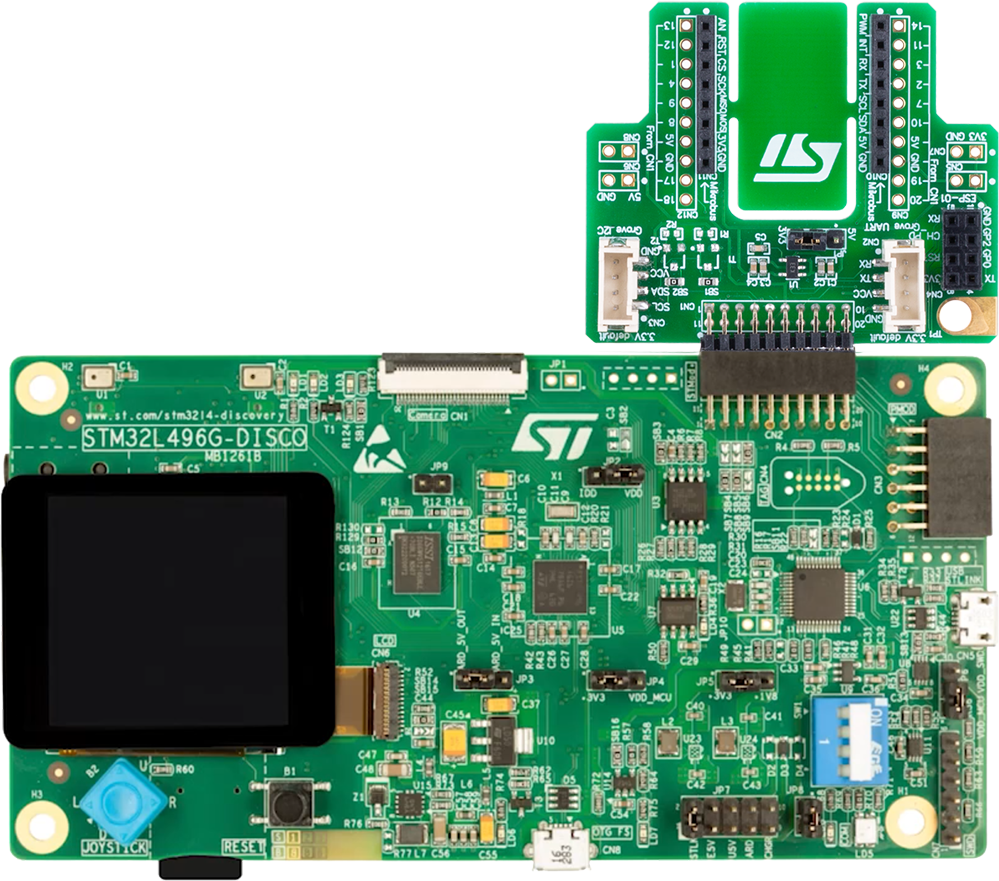
GPS3 Click is based on the L80, a GPS receiver module with a patch antenna equipped with an MTK positioning engine from Quectel. With an embedded LNA at a nominal frequency of 1575.42MHz, the L80 receives an L1 band signal from the GPS satellites. This module uses 66 search channels and 22 simultaneous tracking channels, making it possible to track and find satellites within the shortest time, even when the signal is in a signal-challenging environment. The embedded flash memory stores useful navigation data and performs updates. The L80 communicates with the host MUC using the UART interface with commonly used UART RX and TX
pins as its communication protocol operating at 9600bps. In addition, there is an RST pin for resetting the device. The GPS 3 Click also features a VBAT connector for connecting a battery for the RTC domain, which helps lower the power consumption. Regarding battery usage, the VCC-BCKP solder jumper should be removed. While the current date and time are transmitted in NMEA sentences (UTC), a precise and accurate timing signal is provided and indicated using a red LED indicator marked as PPS. The GPS 3 Click also features the u.FL connector for connecting the appropriate active antenna offered by MIKROE for improved range and received signal strength.
The antenna detection and switching functions will handle the connecting source without a hassle while keeping positioning. The detection result, notification, and statuses of the antennas will also be included in the NMEA message. This Click board™ can only be operated from a 3.3V logic voltage level. Therefore, the board must perform appropriate logic voltage conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
The 32L496GDISCOVERY Discovery kit serves as a comprehensive demonstration and development platform for the STM32L496AG microcontroller, featuring an Arm® Cortex®-M4 core. Designed for applications that demand a balance of high performance, advanced graphics, and ultra-low power consumption, this kit enables seamless prototyping for a wide range of embedded solutions. With its innovative energy-efficient
architecture, the STM32L496AG integrates extended RAM and the Chrom-ART Accelerator, enhancing graphics performance while maintaining low power consumption. This makes the kit particularly well-suited for applications involving audio processing, graphical user interfaces, and real-time data acquisition, where energy efficiency is a key requirement. For ease of development, the board includes an onboard ST-LINK/V2-1
debugger/programmer, providing a seamless out-of-the-box experience for loading, debugging, and testing applications without requiring additional hardware. The combination of low power features, enhanced memory capabilities, and built-in debugging tools makes the 32L496GDISCOVERY kit an ideal choice for prototyping advanced embedded systems with state-of-the-art energy efficiency.
Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
STMicroelectronics
Pin count
169
RAM (Bytes)
327680
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

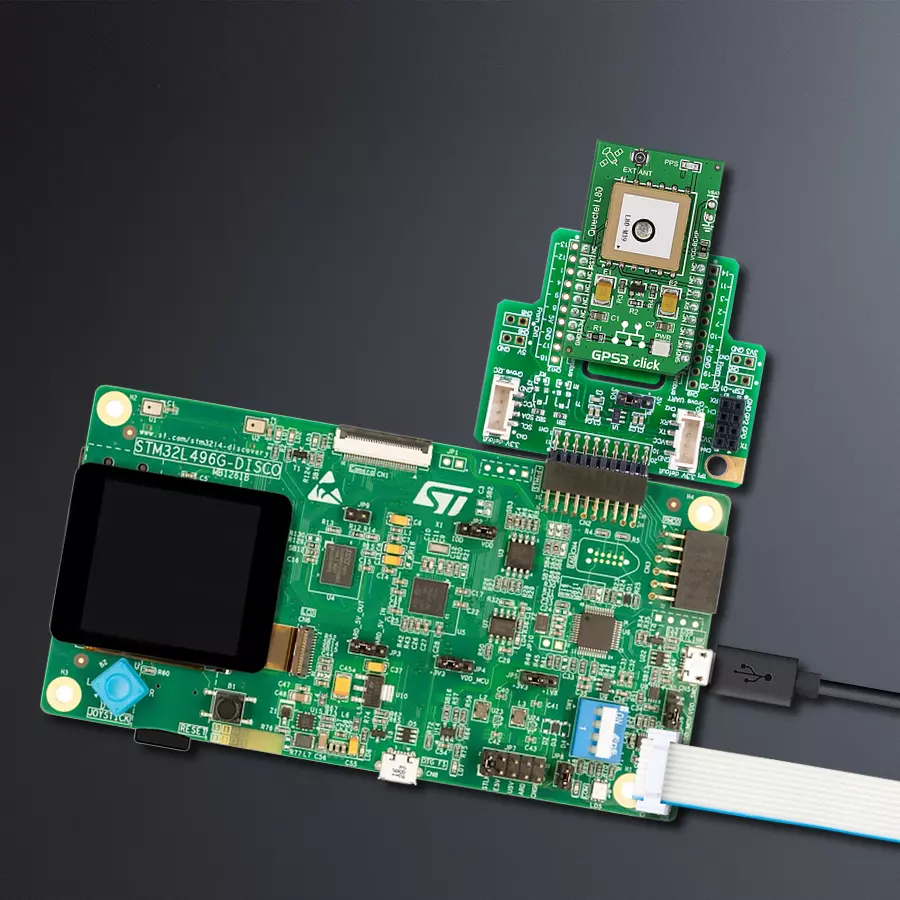
Step by step
Project assembly
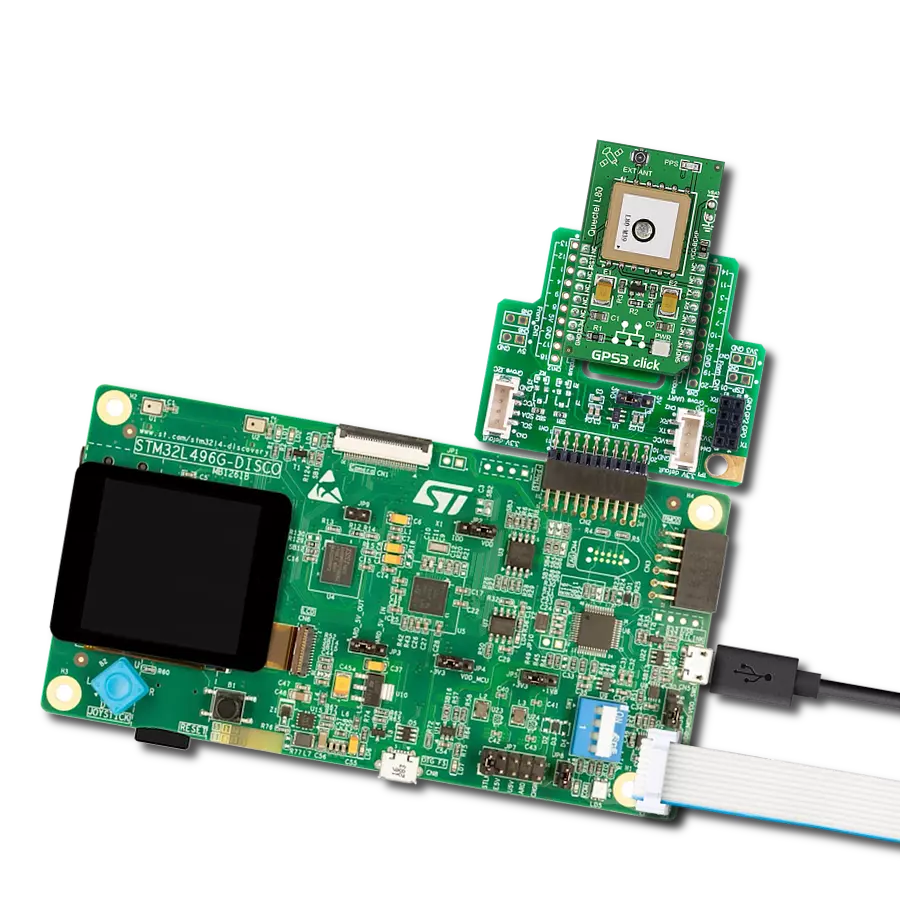
Start by selecting your development board and Click board™. Begin with the Discovery kit with STM32L496AG MCU as your development board.










Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for GPS3 Click driver.
Key functions:
gps3_generic_read- This function reads a desired number of data bytes by using UART serial interfacegps3_clear_ring_buffers- This function clears UART TX and RX ring buffersgps3_parse_gpgga- This function parses the GPGGA data from the read response buffer
Open Source
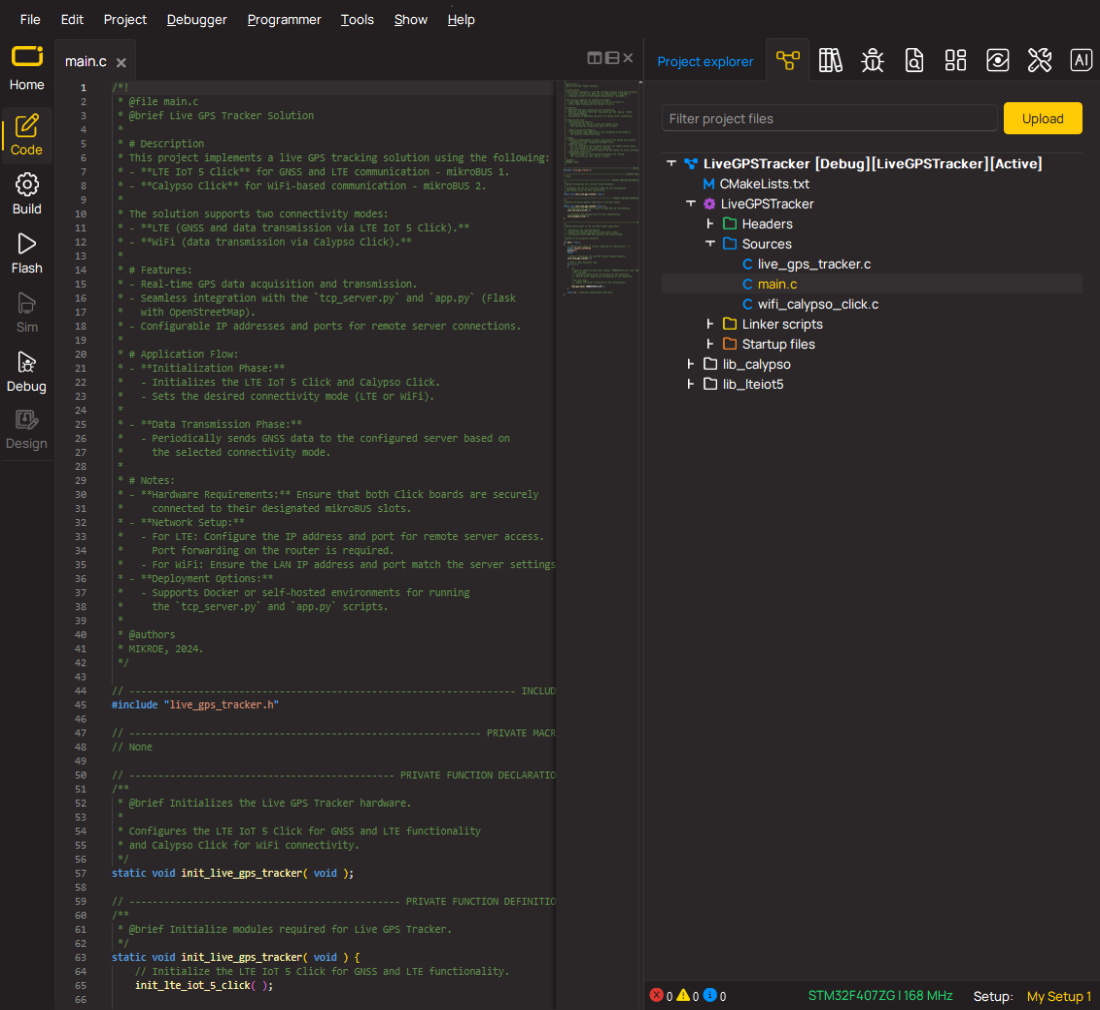
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief GPS 3 Click Example.
*
* # Description
* This example demonstrates the use of GPS 3 Click by reading and displaying
* the GPS coordinates.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and logger.
*
* ## Application Task
* Reads the received data, parses the GPGGA info from it, and once it receives the position fix
* it will start displaying the coordinates on the USB UART.
*
* ## Additional Function
* - static void gps3_clear_app_buf ( void )
* - static err_t gps3_process ( gps3_t *ctx )
* - static void gps3_parser_application ( char *rsp )
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "gps3.h"
#include "string.h"
#define PROCESS_BUFFER_SIZE 200
static gps3_t gps3;
static log_t logger;
static char app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
/**
* @brief GPS 3 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @return None.
* @note None.
*/
static void gps3_clear_app_buf ( void );
/**
* @brief GPS 3 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #gps3_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t gps3_process ( gps3_t *ctx );
/**
* @brief GPS 3 parser application function.
* @details This function parses GNSS data and logs it on the USB UART. It clears app and ring buffers
* after successfully parsing data.
* @param[in] ctx : Click context object.
* See #gps3_t object definition for detailed explanation.
* @param[in] rsp Response buffer.
* @return None.
* @note None.
*/
static void gps3_parser_application ( gps3_t *ctx, char *rsp );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
gps3_cfg_t gps3_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
gps3_cfg_setup( &gps3_cfg );
GPS3_MAP_MIKROBUS( gps3_cfg, MIKROBUS_1 );
if ( UART_ERROR == gps3_init( &gps3, &gps3_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( GPS3_OK == gps3_process( &gps3 ) )
{
if ( PROCESS_BUFFER_SIZE == app_buf_len )
{
gps3_parser_application( &gps3, app_buf );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void gps3_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static err_t gps3_process ( gps3_t *ctx )
{
char rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t rx_size = 0;
rx_size = gps3_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = app_buf_len;
if ( ( ( app_buf_len + rx_size ) > PROCESS_BUFFER_SIZE ) && ( app_buf_len > 0 ) )
{
buf_cnt = PROCESS_BUFFER_SIZE - ( ( app_buf_len + rx_size ) - PROCESS_BUFFER_SIZE );
memmove ( app_buf, &app_buf[ PROCESS_BUFFER_SIZE - buf_cnt ], buf_cnt );
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ buf_cnt++ ] = rx_buf[ rx_cnt ];
if ( app_buf_len < PROCESS_BUFFER_SIZE )
{
app_buf_len++;
}
}
}
return GPS3_OK;
}
return GPS3_ERROR;
}
static void gps3_parser_application ( gps3_t *ctx, char *rsp )
{
char element_buf[ 100 ] = { 0 };
if ( GPS3_OK == gps3_parse_gpgga( rsp, GPS3_GPGGA_LATITUDE, element_buf ) )
{
static uint8_t wait_for_fix_cnt = 0;
if ( strlen( element_buf ) > 0 )
{
log_printf( &logger, "\r\n Latitude: %.2s degrees, %s minutes \r\n", element_buf, &element_buf[ 2 ] );
gps3_parse_gpgga( rsp, GPS3_GPGGA_LONGITUDE, element_buf );
log_printf( &logger, " Longitude: %.3s degrees, %s minutes \r\n", element_buf, &element_buf[ 3 ] );
memset( element_buf, 0, sizeof( element_buf ) );
gps3_parse_gpgga( rsp, GPS3_GPGGA_ALTITUDE, element_buf );
log_printf( &logger, " Altitude: %s m \r\n", element_buf );
wait_for_fix_cnt = 0;
}
else
{
if ( wait_for_fix_cnt % 5 == 0 )
{
log_printf( &logger, " Waiting for the position fix...\r\n\n" );
wait_for_fix_cnt = 0;
}
wait_for_fix_cnt++;
}
gps3_clear_ring_buffers( ctx );
gps3_clear_app_buf( );
}
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:GPS/GNSS