Improve every journey with LEA-6S and TM4C129ENCZAD
Navigate with precision, anywhere, anytime

Published Aug 30, 2023
Click board™
GPS Click
Dev. board
Fusion for Tiva v8
Compiler
NECTO Studio
MCU
TM4C129ENCZAD
Devoted to heightening the travel experience, this solution functions as a guiding beacon, shedding light on routes and destinations and instilling confidence for exploration
A
A
Hardware Overview
How does it work?
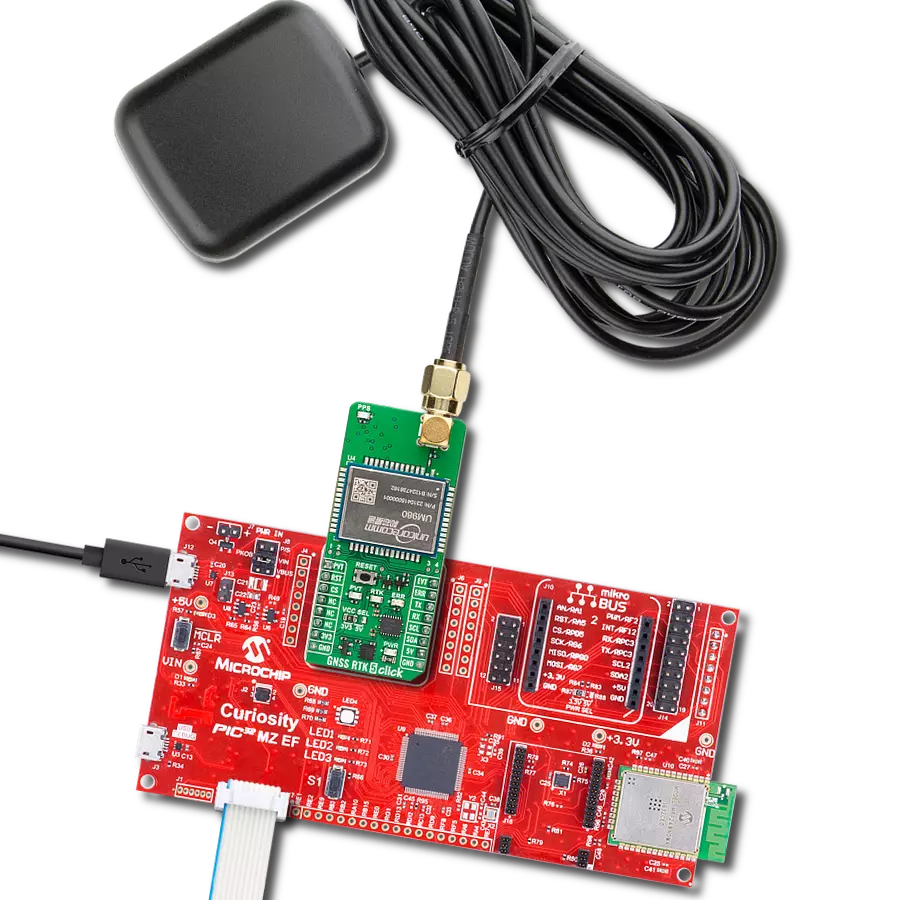
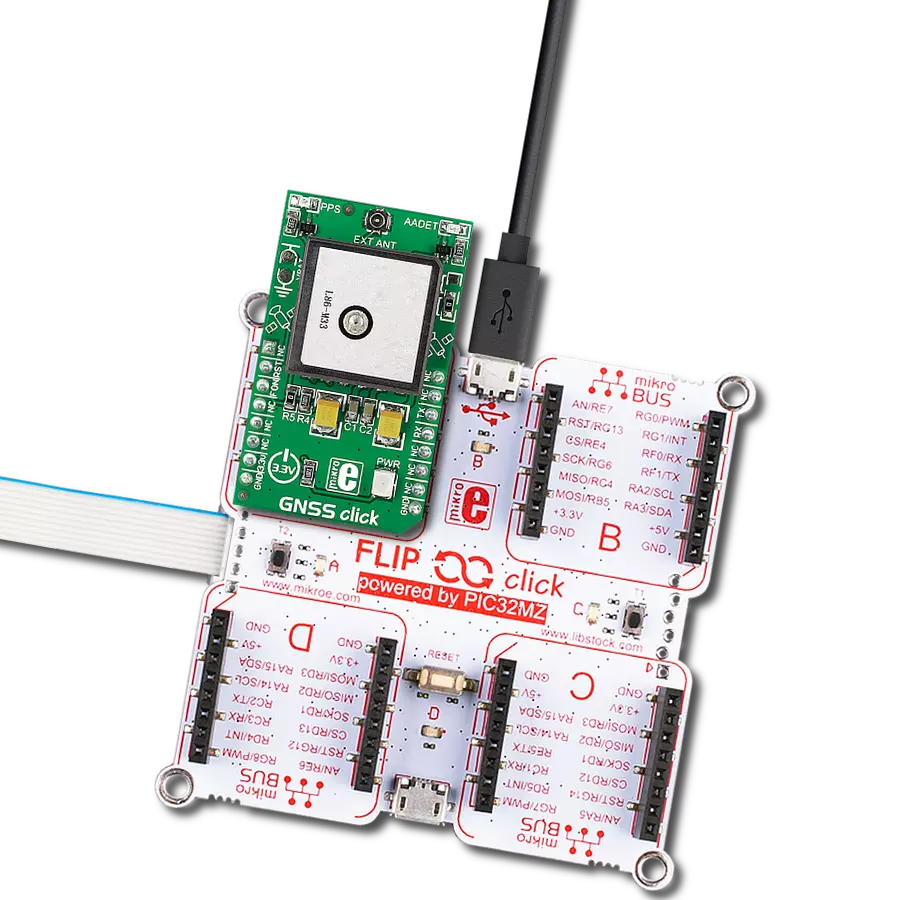
GPS Click is based on the LEA-6S, a high-performance position engine module from u-blox. The versatile, standalone LEA-6S receiver combines extensive features with flexible connectivity options. Its ease of integration results in fast time-to-market for various automotive and industrial applications. The positioning engine consists of cold start navigation, AssitsNow Autonomous for faster acquisition, configurable power management, a hybrid GPS/SBAS engine (WAAS, EGNOS, MSAS), and anti-jamming technology. The GPS module needs an SMA GPS antenna for the GPS applications, which can be bought from Mikroe separately. Different power modes (Maximum performance, Eco, Power Save) allow you to control the acquisition and tracking engines to balance performance and power consumption. During a Cold start, a receiver in Maximum Performance Mode continuously deploys the acquisition engine to search for all satellites. Once the receiver has a position fix (or if pre-positioning information is available), the acquisition
engine continues to search for all visible satellites that are not being tracked. During a Cold start, a receiver in Eco Mode works exactly as in Maximum Performance Mode. Once a position can be calculated and a sufficient number of satellites are tracked, the acquisition engine is powered off, resulting in significant power savings. The tracking engine continuously tracks acquired satellites and acquires other available or emerging satellites. Note that even if the acquisition engine is powered off, satellites continue to be acquired. Power Save Mode reduces system power consumption by selectively switching receiver parts on and off. GPS click can simultaneously track up to 16 satellites while searching for new ones. The LEA-6S module’s TTFF (time to first fix) is less than one second — this is the measure of time necessary for a GPS receiver to get satellite signals and navigation data, and based on this information, calculate a position (a fix). The GPS Click is equipped with a TIME PULSE LED as a 1PPS LED for that purpose. The Time Pulse has a 99%
accuracy, and its frequency range is adjustable from 0.25Hz to 1kHz. The Time Pulse can be tracked over the TP pin of the mikroBUS™ socket, too. GPS Click as default communication with the host MCU uses a standard 2-Wire UART interface with commonly used UART RX and TX and supports 4800 and 9600bps, depending on settings. The I2C-compatible Display Data Channel (DDC) can also be used to interface host MCU. It is a standard mode compliant with a maximum bandwidth of 100kbps. On the other hand, GPS Click supports a full-speed USB 2.0 at 1.2Mbps. If such a case emerges, you can always reset the module over the RST pin. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
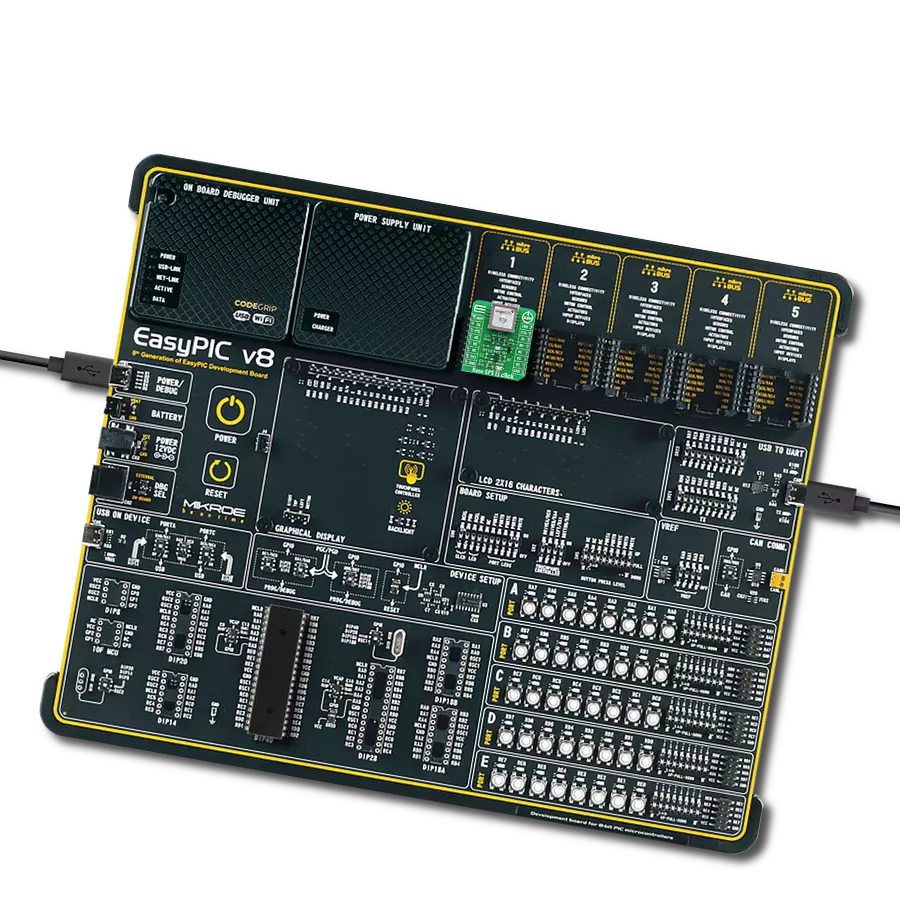
Fusion for TIVA v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different 32-bit ARM® Cortex®-M based MCUs from Texas Instruments, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over a WiFi network. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for TIVA v8 provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances at any time. Each part of the Fusion for TIVA v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for TIVA v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
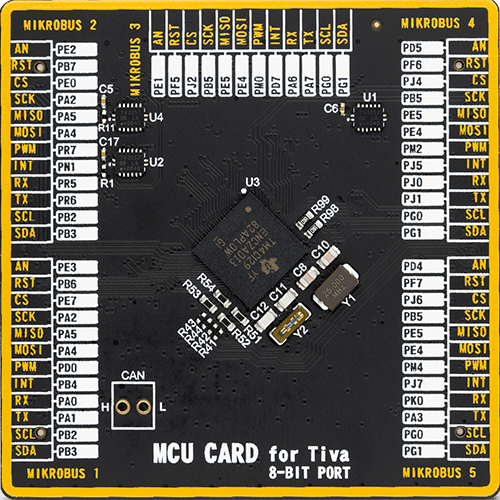
Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
Texas Instruments
Pin count
212
RAM (Bytes)
262144
You complete me!
Accessories
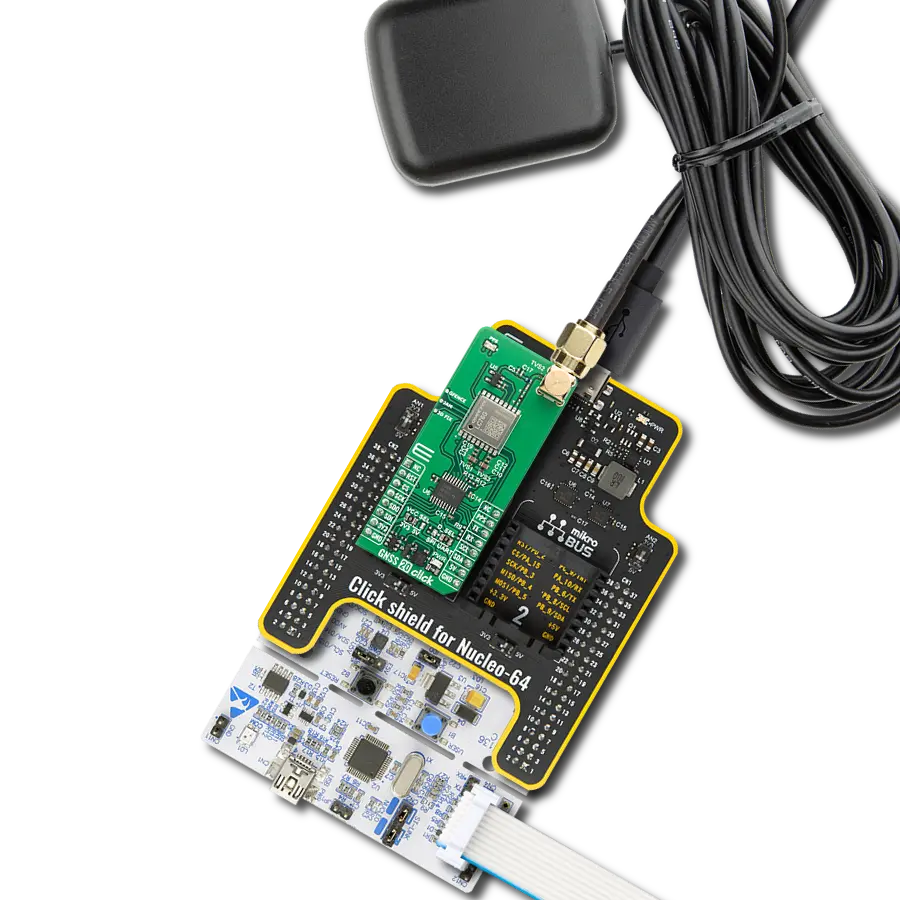
Active GPS antenna is designed to enhance the performance of your GPS and GNSS Click boards™. This external antenna boasts a robust construction, making it ideal for various weather conditions. With a frequency range of 1575.42MHz and a 50Ohm impedance, it ensures reliable signal reception. The antenna delivers a gain of greater than -4dBic within a wide angular range, securing over 75% coverage. The bandwidth of +/- 5MHz further guarantees precise data acquisition. Featuring a Right-Hand Circular Polarization (RHCP), this antenna offers stable signal reception. Its compact dimensions of 48.53915mm and a 2-meter cable make it easy to install. The magnetic antenna type with an SMA male connector ensures a secure and convenient connection. If you require a dependable external antenna for your locator device, our active GPS antenna is the perfect solution.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
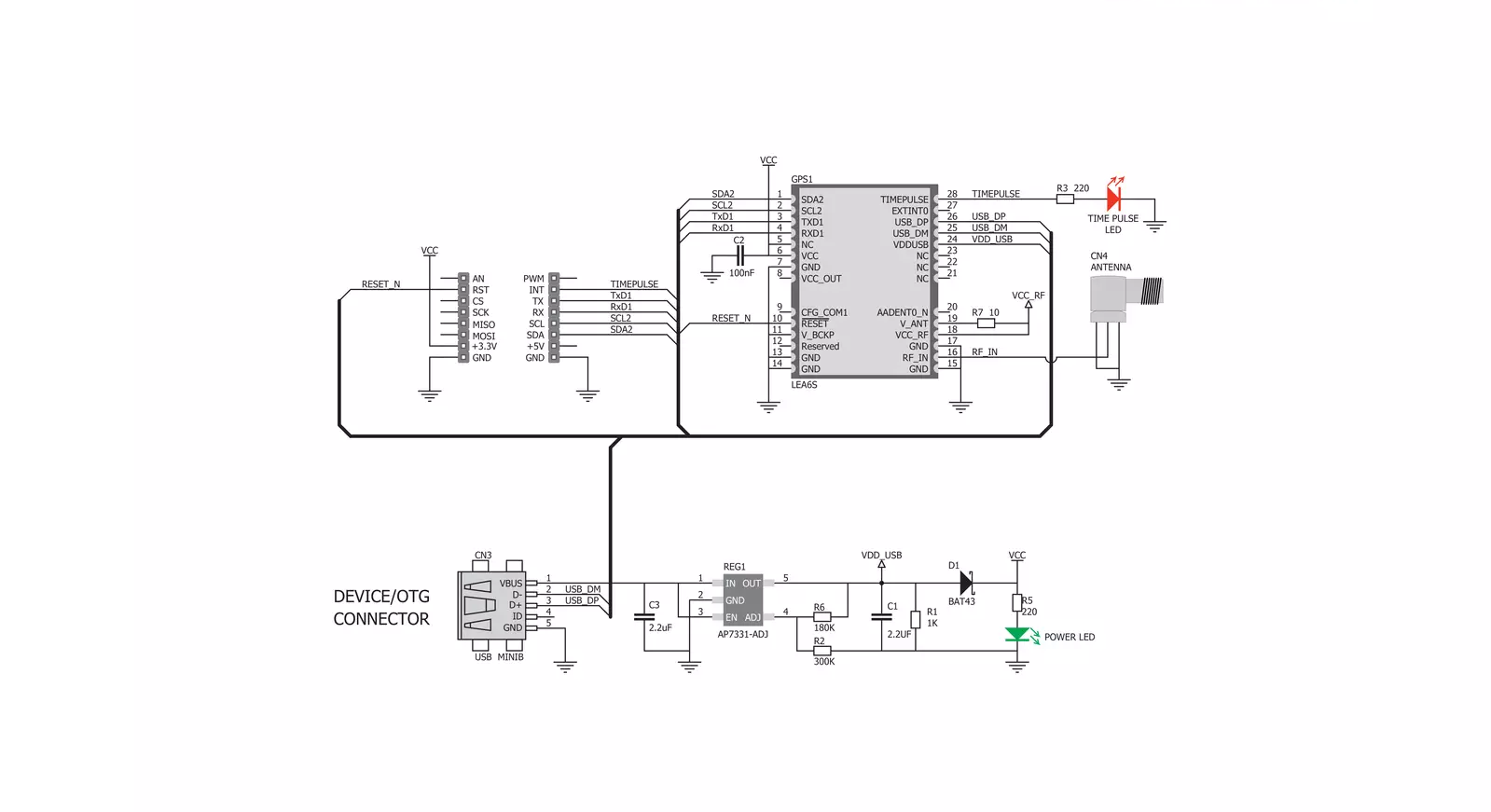
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for Tiva v8 as your development board.














Software Support
Library Description
This library contains API for GPS Click driver.
Key functions:
gps_generic_parser- Generic parser functiongps_generic_read- Generic read functiongps_module_wakeup- Wake-up module
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Gps Click example
*
* # Description
* This example reads and processes data from GPS Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and wake-up module.
*
* ## Application Task
* Reads the received data and parses it.
*
* ## Additional Function
* - gps_process ( ) - The general process of collecting data the module sends.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "gps.h"
#include "string.h"
#define PROCESS_COUNTER 15
#define PROCESS_RX_BUFFER_SIZE 600
#define PROCESS_PARSER_BUFFER_SIZE 600
// ------------------------------------------------------------------ VARIABLES
static gps_t gps;
static log_t logger;
static char current_parser_buf[ PROCESS_PARSER_BUFFER_SIZE ];
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void gps_process ( void )
{
int32_t rsp_size;
uint16_t rsp_cnt = 0;
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint16_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
// Clear parser buffer
memset( current_parser_buf, 0 , PROCESS_PARSER_BUFFER_SIZE );
while( process_cnt != 0 )
{
rsp_size = gps_generic_read( &gps, &uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 )
{
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ )
{
if ( uart_rx_buffer[ check_buf_cnt ] == 0 )
{
uart_rx_buffer[ check_buf_cnt ] = 13;
}
}
// Storages data in parser buffer
rsp_cnt += rsp_size;
if ( rsp_cnt < PROCESS_PARSER_BUFFER_SIZE )
{
strncat( current_parser_buf, uart_rx_buffer, rsp_size );
}
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else
{
process_cnt--;
// Process delay
Delay_100ms( );
}
}
}
static void parser_application ( char *rsp )
{
char element_buf[ 200 ] = { 0 };
log_printf( &logger, "\r\n-----------------------\r\n" );
gps_generic_parser( rsp, GPS_NEMA_GPGGA, GPS_GPGGA_LATITUDE, element_buf );
if ( strlen( element_buf ) > 0 )
{
log_printf( &logger, "Latitude: %.2s degrees, %s minutes \r\n", element_buf, &element_buf[ 2 ] );
gps_generic_parser( rsp, GPS_NEMA_GPGGA, GPS_GPGGA_LONGITUDE, element_buf );
log_printf( &logger, "Longitude: %.3s degrees, %s minutes \r\n", element_buf, &element_buf[ 3 ] );
memset( element_buf, 0, sizeof( element_buf ) );
gps_generic_parser( rsp, GPS_NEMA_GPGGA, GPS_GPGGA_ALTITUDE, element_buf );
log_printf( &logger, "Altitude: %s m", element_buf );
}
else
{
log_printf( &logger, "Waiting for the position fix..." );
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
gps_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
gps_cfg_setup( &cfg );
GPS_MAP_MIKROBUS( cfg, MIKROBUS_1 );
gps_init( &gps, &cfg );
gps_module_wakeup( &gps );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
void application_task ( void )
{
gps_process( );
parser_application( current_parser_buf );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:GPS/GNSS