Achieve real-time data exchange over extended distances with MAX1471 and PIC18F97J60
Revolutionize your wireless world: Discover the power of sub-GHz RF technology!

Published Nov 09, 2023
Click board™
ISM RX Click
Dev Board
Fusion for PIC v8
Compiler
NECTO Studio
MCU
PIC18F97J60
Our sub-GHz ISM RF receiver empowers seamless long-range communication for IoT devices, bridging the gap where others fall short.
A
A
Hardware Overview
How does it work?
ISM RX Click is based on the MAX1471, a low-power CMOS superheterodyne receiver for ASK and FSK data without reconfiguration from Analog Devices. It includes all the active components, such as a low-noise amplifier, an image-reject mixer, a fully integrated PLL, a 10.7MHz IF limiting amplifier received-signal strength indicator, a low-noise FM demodulator, and a 3V voltage regulator. The MAX1471 can achieve data rates as high as 33kbps using Manchester Code (66kbps nonreturn to zero), depending on signal power and component selection. As mentioned, this Click board™ can receive both ASK and FSK data simultaneously. This feature of the MAX1471 can be achieved and selected with the switch labeled DMOD SEL that allows the selection between ASK and FSK data. The MAX1471 receives binary FSK or ASK
data at 433.92MHz, set based on the used components. ASK modulation uses a difference in the carrier's amplitude to represent logic 0 and logic 1 data, while the FSK uses the difference in frequency of the carrier. Differential peak-detecting data demodulators are available for FSK and ASK analog baseband data recovery. The MAX1471 consists of a discontinuous Receive mode for low-power operation, configured through a serial interface. This mode also allows self-polling, where the MAX1471 can stay in Sleep mode for as long as eight minutes and wake the system MCU, offering additional power savings. On the consumption side, it draws less than 1.1µA in Shutdown and only 7mA in Receive mode. ISM RX Click communicates with MCU using a standard SPI interface and possesses the SMA
antenna connector with an impedance of 50Ω. This Click board™ can use the appropriate antenna that Mikroe has in its offer for improved range and received signal strength. This Click board™ operates only with a 5V logic voltage from the mikroBUS™ socket. Still, the MAX1471 power supply offers the possibility of using both 3V, obtained by the NCP170 voltage regulator, and 5V logic voltage level selected via the HVIN SEL jumpers. Note that all the jumpers must be placed on the same side, or the Click board™ may become unresponsive. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Fusion for PIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different PIC, dsPIC, PIC24, and PIC32 MCUs regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for PIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the Fusion for PIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector. Communication options such as USB-UART, USB
HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet are also included, including the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options (graphical and character-based LCD). Fusion for PIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Type
8th Generation
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
3808
You complete me!
Accessories
Right angle 433MHz rubber antenna boasts a frequency range of 433MHz, ensuring optimal performance within this spectrum. With a 50Ohm impedance, it facilitates efficient signal transmission. The antenna's vertical polarization enhances signal reception in a specific orientation. Featuring a 1.5dB gain, it can improve signal strength to some extent. The antenna can handle a maximum input power of 50W, making it suitable for various applications. Its compact 50mm length minimizes spatial requirements. Equipped with an SMA male connector, it easily interfaces with compatible devices. This antenna is an adaptable solution for wireless communication needs, particularly when vertical polarization is crucial.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
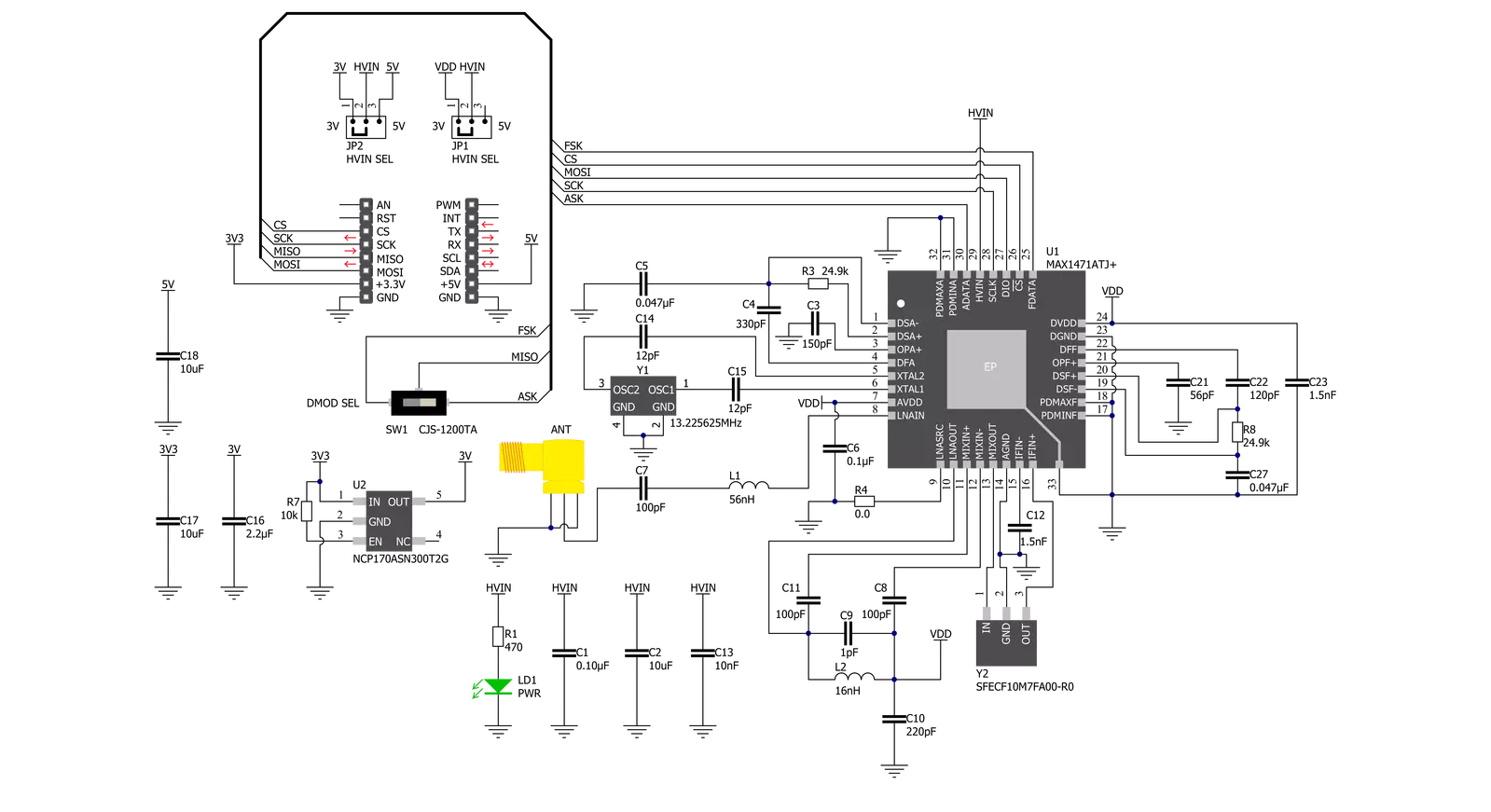
Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for PIC v8 as your development board.














Track your results in real time
Application Output
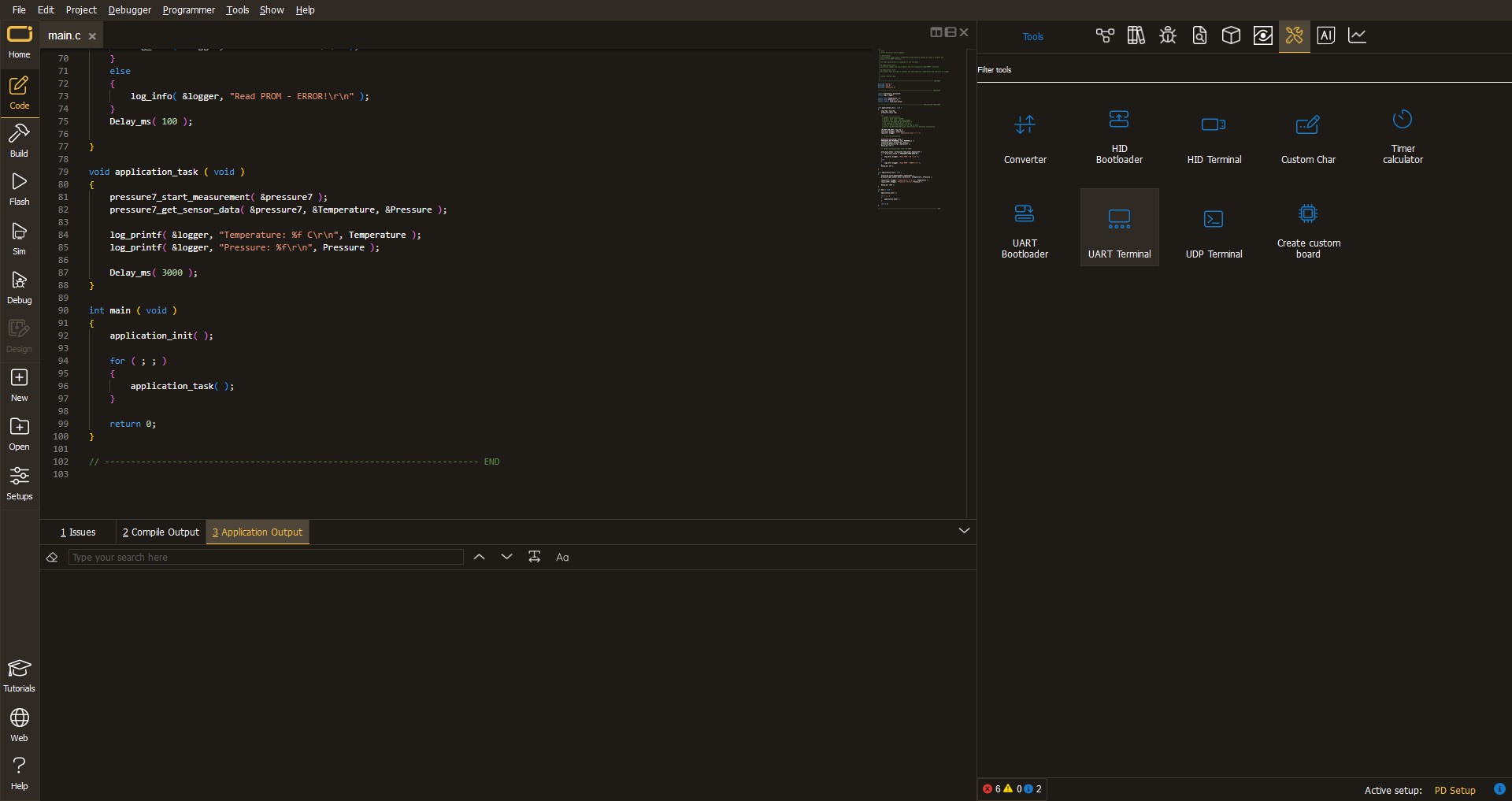
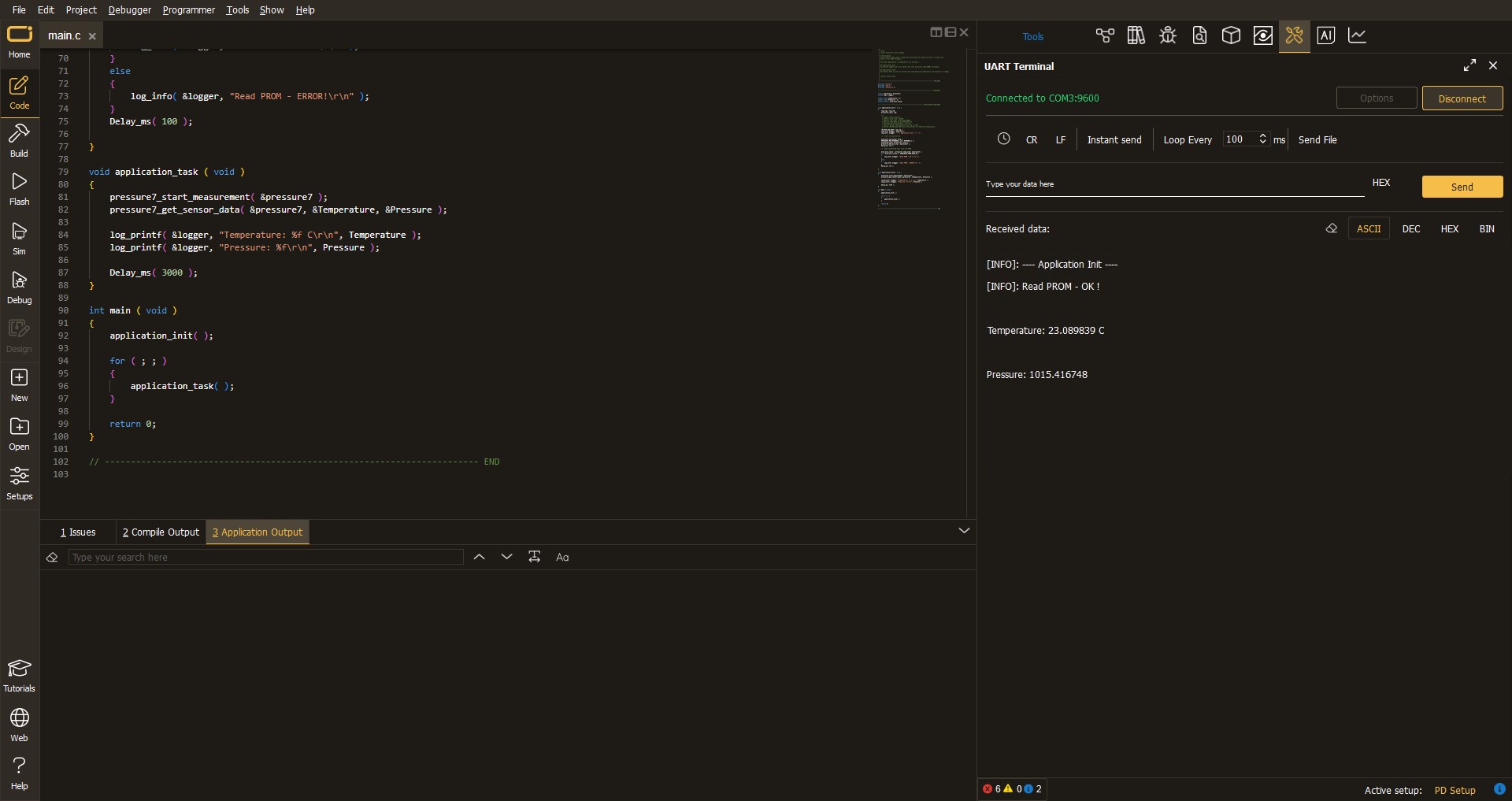
After pressing the "FLASH" button on the left-side panel, it is necessary to open the UART terminal to display the achieved results. By clicking on the Tools icon in the right-hand panel, multiple different functions are displayed, among which is the UART Terminal. Click on the offered "UART Terminal" icon.
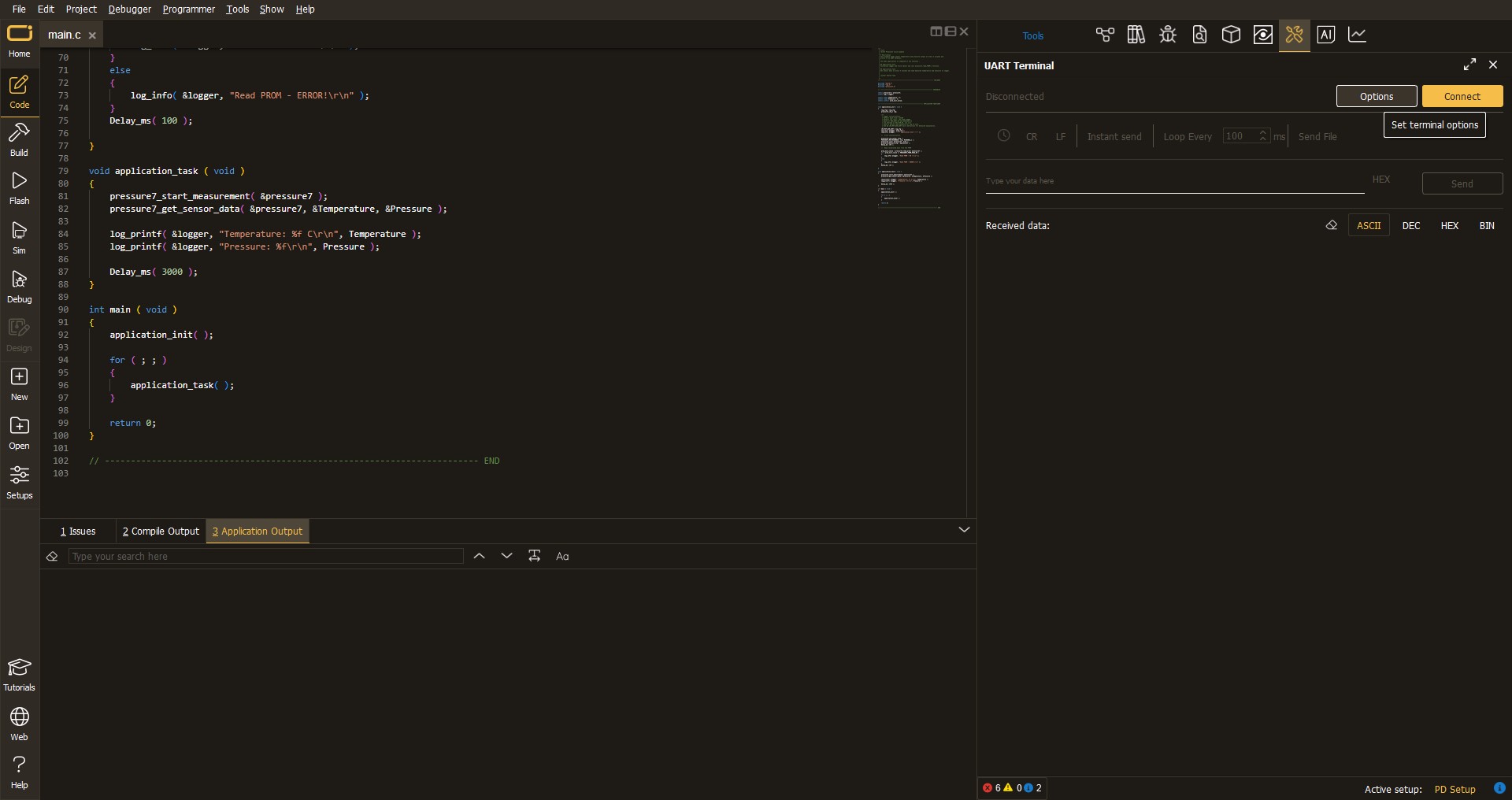
Once the UART terminal is opened, the window takes on a new form. At the top of the tab are two buttons, one for adjusting the parameters of the UART terminal and the other for connecting the UART terminal. The tab's lower part is reserved for displaying the achieved results. Before connecting, the terminal has a Disconnected status, indicating that the terminal is not yet active. Before connecting, it is necessary to check the set parameters of the UART terminal. Click on the "OPTIONS" button.
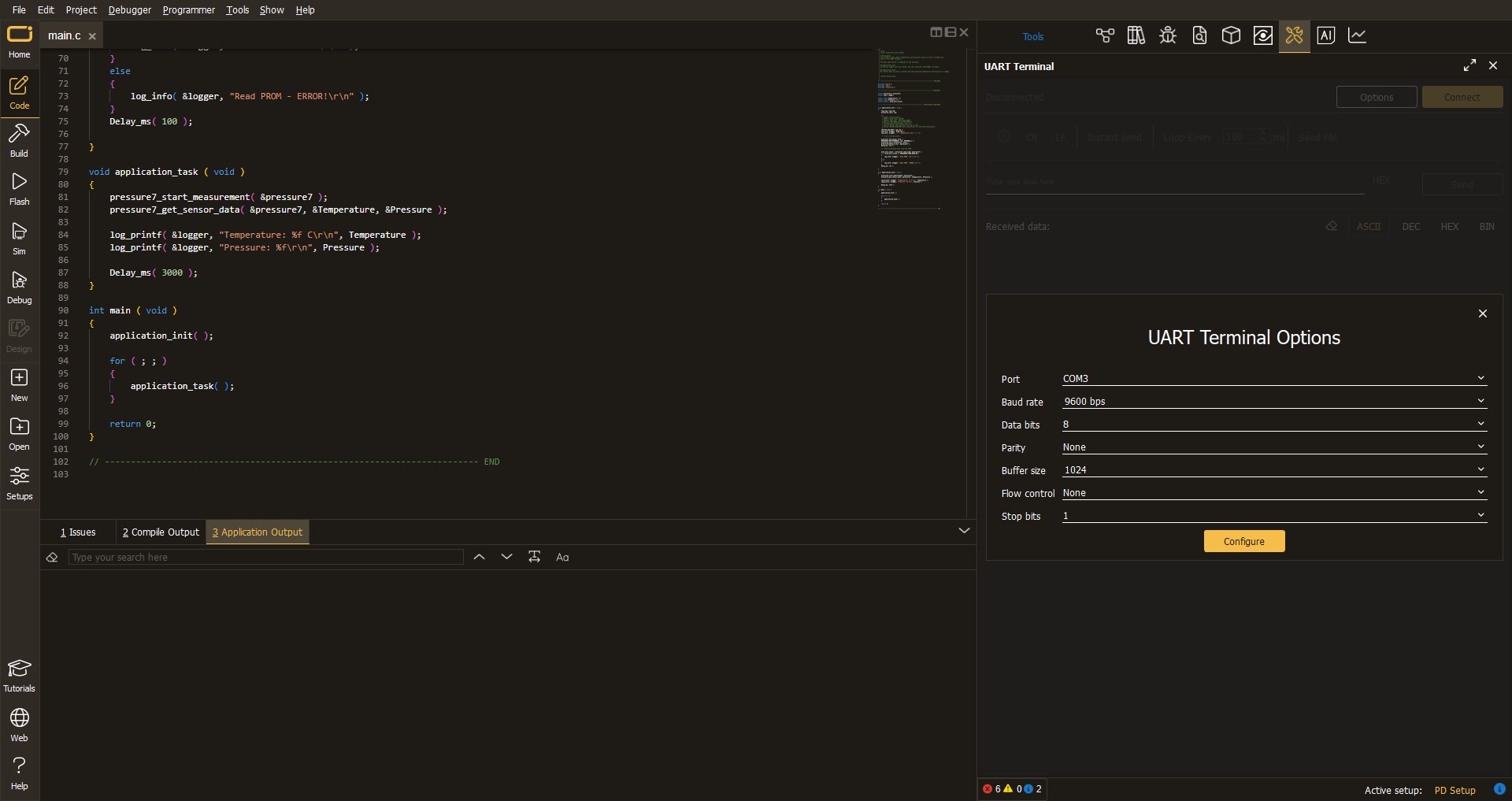
In the newly opened UART Terminal Options field, we check if the terminal settings are correct, such as the set port and the Baud rate of UART communication. If the data is not displayed properly, it is possible that the Baud rate value is not set correctly and needs to be adjusted to 115200. If all the parameters are set correctly, click on "CONFIGURE".
The next step is to click on the "CONNECT" button, after which the terminal status changes from Disconnected to Connected in green, and the data is displayed in the Received data field.
Software Support
Library Description
This library contains API for ISM RX Click driver.
Key functions:
ismrx_generic_write- ISM RX data writing function.ismrx_master_reset- This sends command for resetting device.ismrx_get_data- ISM RX get miso pin state.
Open Source
Code example
This example can be found in NECTO Studio. Feel free to download the code, or you can copy the code below.
/*!
* @file main.c
* @brief ISMRX Click example
*
* # Description
* This application shows capability of ISM RX Click board.
* It sets default configuration, and collects and processes
* data from signal that received from ISM TX Click board.
* It can collect and process data from 2 type of the signal
* modulation( FSK and ASK ).
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of log and communication, set's signal
* modulation(FSK/ASK), recive mode(continuous/discontinuous),
* default configuration for selected modulation, and
* reinitializes device for receiving mode.
*
* ## Application Task
* Collects samples of data from data line(MISO) when buffer
* is full converts samples to manchester encoded data,
* and checks for preamble(sync) data. If data is valid
* decodes data and converts bit's to valid data and logs
* result of received decoded data.
*
* ## Additional Function
* - static void clear_buffers ( void )
* - static void proces_samples ( void )
* - static void convert_to_manchester ( uint8_t same_data, uint8_t data_coll )
* - static err_t check_preamble ( void )
* - static void convert_to_bits ( void )
* - static static err_t convert_to_data ( void )
*
* *note:*
* Macros for checking sample data and delay in application_task
* can be prone to change depending of speed of MCU.
*
* @author Luka Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "ismrx.h"
static ismrx_t ismrx;
static log_t logger;
//minimum samples for single valid manchester data
#define SINGLE_MAN_MIN 2
//maximum samples for single valid manchester data
#define SINGLE_MAN_MAX 4
//maximum samples for double valid manchester data
#define DUAL_MAN_MAX 7
#define BUFFER_SIZE 800
#define MAN_BUF_SIZE 800
#define BIT_BUF_SIZE 400
#define DATA_BUF_SIZE 50
#define ASK_PREAMBLE_STRING "0101010101010101"
#define FSK_PREAMBLE_STRING "010101010101"
static uint8_t buffer[ BUFFER_SIZE ];
static uint8_t manchester_buf[ MAN_BUF_SIZE ];
static uint8_t bit_buf[ BIT_BUF_SIZE ];
static uint8_t data_buf[ DATA_BUF_SIZE ];
static uint16_t buffer_cnt = 0;
static uint16_t manchester_cnt = 0;
static uint16_t bit_cnt = 0;
static uint16_t data_cnt = 0;
static uint16_t manchester_start_preamble;
/**
* @brief Clears app buffers.
* @details This function clears application buffer and resets counters.
* @return Nothing.
*/
static void clear_buffers ( void );
/**
* @brief Proceses collected data.
* @details Function goes throught collected samples and converts
* it to manchester data. Then seraches for preamble(sync) byte and
* if it received it converts manchester encoded data to bits and
* then that converts to bytes. Checks if data is correct and then
* logs bytes from second to the byte value of the first converted byte.
* @return Nothing.
*/
static void proces_samples ( void );
/**
* @brief Adds element to manchester buffer.
* @details This function adds @b data_coll element to manchester buffer
* if @b same_data parameter is in range of valid data.
* @param[in] same_data : Number of consecutive occurrence of the state.
* @param[in] data_coll : Collected consecutive sample.
* @return Nothing.
*/
static void convert_to_manchester ( uint8_t same_data, uint8_t data_coll );
/**
* @brief Checks for preamble(sync) data.
* @details This function searches manchester buffer for
* preamble(sync) data and returns status.
* @return @li @c 0 - Preamble data found,
* @li @c -1 - Preamble data not found.
* @note Preamble data differs relative to signal modulation.
*/
static err_t check_preamble ( void );
/**
* @brief Converts manchester buffer to bit buffer.
* @details This function converts manchester encoded
* buffer to bit buffer from preamble data.
* @return Nothing.
*/
static void convert_to_bits ( void );
/**
* @brief Converts bit buffer to data buffer.
* @details This function converts bit buffer to data buffer.
* @return @li @c 0 - Success,
* @li @c -1 - Error.
* @note First byte will be number of bytes that ISM TX click transmissed.
*/
static err_t convert_to_data ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
ismrx_cfg_t ismrx_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
ismrx_cfg_setup( &ismrx_cfg );
ISMRX_MAP_MIKROBUS( ismrx_cfg, MIKROBUS_1 );
err_t init_flag = ismrx_init( &ismrx, &ismrx_cfg );
if ( init_flag == SPI_MASTER_ERROR )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
Delay_ms( 1000 );
ismrx_master_reset( &ismrx );
ismrx.modulation = ISMRX_MODULATION_FSK;
ismrx.receive_mode = ISMRX_RECEIVE_MODE_RX;
if ( ismrx_default_cfg ( &ismrx ) < 0 )
{
log_error( &logger, " Default configuration error. " );
log_info( &logger, " Please, select signal modulation and/or receive mode... " );
for ( ; ; );
}
if ( ismrx_task_init( &ismrx, &ismrx_cfg ) < 0 )
{
log_error( &logger, " Application Task Error. " );
}
log_info( &logger, " Application Task " );
if ( ISMRX_RECEIVE_MODE_DRX == ismrx.receive_mode )
{
ismrx_start_drx( &ismrx );
}
}
void application_task ( void )
{
if ( ismrx_get_data( &ismrx ) )
{
buffer[ buffer_cnt ] = '1';
}
else
{
buffer[ buffer_cnt ] = '0';
}
buffer_cnt++;
//Delay for sample ratio to be effective
Delay_us( 60 );
if ( buffer_cnt > BUFFER_SIZE )
{
proces_samples();
clear_buffers();
}
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
static void clear_buffers ( void )
{
memset( buffer, 0, BUFFER_SIZE );
buffer_cnt = 0;
memset( manchester_buf, 0, MAN_BUF_SIZE );
manchester_cnt = 0;
memset( bit_buf, 0, BIT_BUF_SIZE );
bit_cnt = 0;
memset( data_buf, 0, DATA_BUF_SIZE );
data_cnt = 0;
}
static void proces_samples ( void )
{
uint16_t i;
uint8_t last_byte = buffer[ 0 ];
uint8_t same_data_cnt = 1;
for ( i = 1; i < buffer_cnt; i++ )
{
if ( last_byte == buffer[ i ] )
{
same_data_cnt++;
}
else
{
convert_to_manchester ( same_data_cnt, last_byte );
last_byte = buffer[ i ];
same_data_cnt = 1;
}
if ( manchester_cnt > MAN_BUF_SIZE )
{
break;
}
}
if ( !check_preamble( ) )
{
convert_to_bits( );
if ( !convert_to_data() )
{
for ( i = 1; i < data_buf[ 0 ] + 1; i++ )
{
log_printf( &logger, "%c", data_buf[ i ] );
}
log_printf( &logger, "\r\n" );
}
}
}
static void convert_to_manchester ( uint8_t same_data, uint8_t data_coll )
{
if ( ( SINGLE_MAN_MIN <= same_data ) && ( SINGLE_MAN_MAX >= same_data ) )
{
manchester_buf[ manchester_cnt ] = data_coll;
manchester_cnt++;
}
else if ( DUAL_MAN_MAX >= same_data )
{
manchester_buf[ manchester_cnt ] = data_coll;
manchester_buf[ manchester_cnt + 1 ] = data_coll;
manchester_cnt += 2;
}
}
static err_t check_preamble ( )
{
char preamble[ 20 ] = { 0 };
char * __generic cmd_start;
if ( ismrx.modulation == ISMRX_MODULATION_FSK )
{
strcpy( preamble, FSK_PREAMBLE_STRING );
}
else
{
strcpy( preamble, ASK_PREAMBLE_STRING );
}
cmd_start = strstr( manchester_buf, preamble );
if ( cmd_start != 0 )
{
manchester_start_preamble = cmd_start - &manchester_buf[ 0 ];
manchester_start_preamble += strlen( preamble );
return ISMRX_OK;
}
else
{
return ISMRX_ERROR;
}
}
static void convert_to_bits ( void )
{
bit_cnt = 0;
for ( uint16_t i = manchester_start_preamble; i < manchester_cnt; i += 2 )
{
if ( manchester_buf[ i ] == '0' )
{
bit_buf[ bit_cnt ] = 1;
}
if ( manchester_buf[ i ] == '1' )
{
bit_buf[ bit_cnt ] = 0;
}
bit_cnt++;
}
}
static err_t convert_to_data ( void )
{
data_cnt = 0;
for ( uint16_t i = 0; i < bit_cnt; i++ )
{
if ( ( i != 0 ) && ( ( i % 8 ) == 0 ) )
{
data_cnt++;
}
data_buf[ data_cnt ] <<= 1;
if ( bit_buf[ i ] )
{
data_buf[ data_cnt ] |= 1;
}
}
if ( data_cnt < data_buf[ 0 ] )
{
return ISMRX_ERROR;
}
else
{
return ISMRX_OK;
}
}
// ------------------------------------------------------------------------ END















