Produce an output voltage that is less than its input with TPSM63610 and STM32F207ZG
Adjusting power for perfect performance

Published 12月 09, 2023
Click board™
Step Down 10 Click
Dev Board
Fusion for ARM v8
Compiler
NECTO Studio
MCU
STM32F207ZG
Make sure your device gets the right "language" of power, even if the power source speaks a different voltage "language"
A
A
Hardware Overview
How does it work?
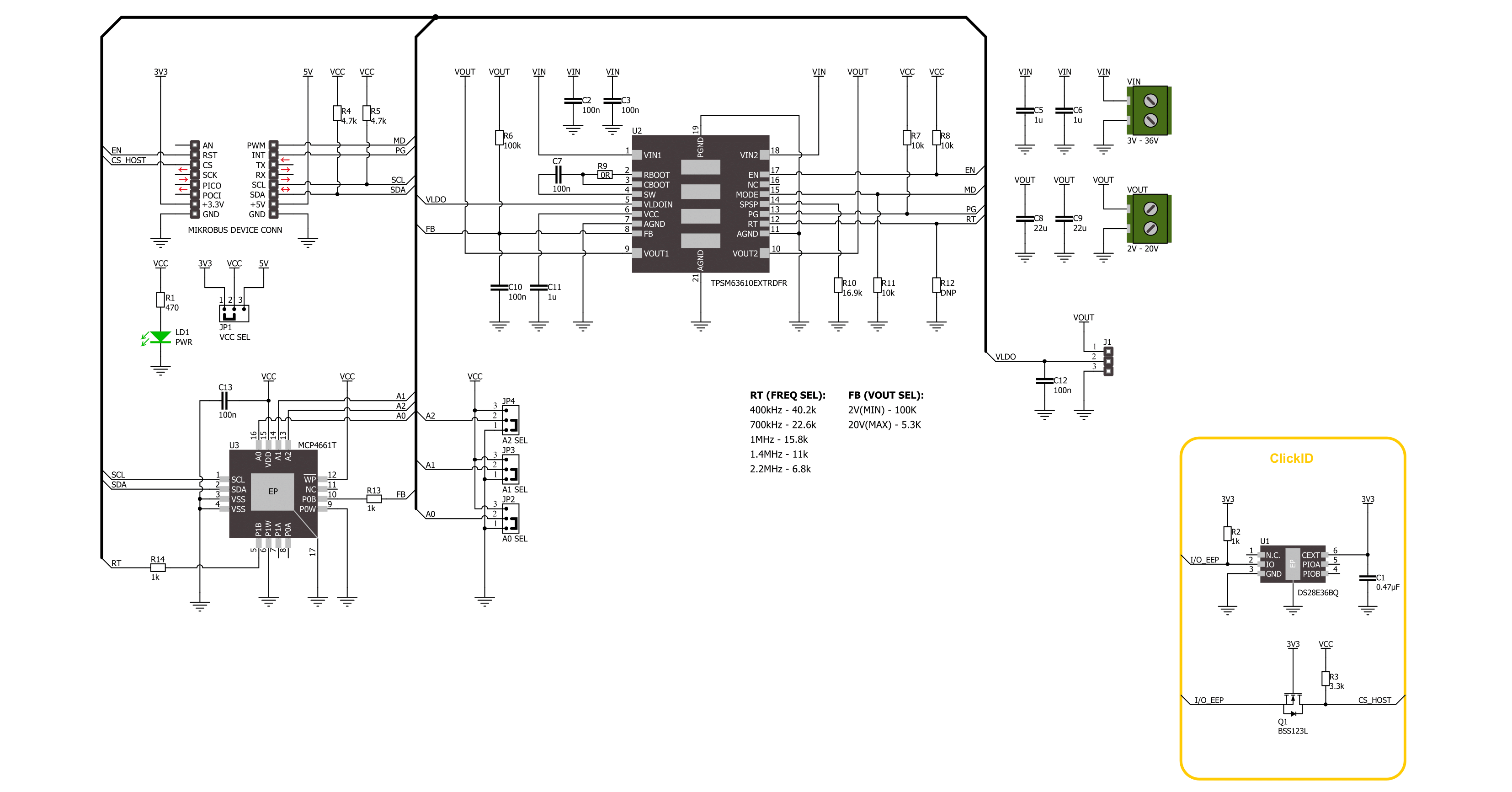
Step Down 10 Click is based on the TPSM63610, a high-density synchronous buck DC/DC power module with enhanced HotRodTM from Texas Instruments. The TPSM63610 features up to 95% efficiency, ultra-low conducted and radiated EMI signatures, several protection mechanisms, and more. The feedback input of the TPSM63610 that sets the desired voltage output regulation consists of a voltage divider, of which one part is the MCP4661T, a dual digital POT with non-volatile memory from Microchip. The MCP4661T is a 100K potentiometer in 8-bit resolution, has 256 wiper steps, and can store values in the internal EEPROM. The TPSM63610 also has an adjustable frequency of 2.2MHz up to 400kHz, which can be selected over the onboard digital potentiometer or set as a fixed value over the unpopulated R12
resistor. The values are in the table of the attached Step Down 10 Click schematic. There are two screw terminals for connecting input and output voltages. The Step Down 10 Click features an additional 3-pin header. This header allows you to improve efficiency by connecting the VLDO as an input bias voltage to the VOUT as an output voltage. You can also improve noise immunity by connecting the VLDO to GND with a 0.1 μF to 1 μF capacitor. If the output voltage is above the 12V, connect VLDO to GND. Step Down 10 Click uses a standard 2-Wire I2C interface of the MCP4661T to allow the host MCU to set the output voltage, supporting clock frequencies up to 3.4MHz. The I2C address can be selected over the ADDR SEL jumper (0 set by default). The power-good PG pin will be asserted if the output voltage is not within
the specified window threshold. Over the MD pin, you can set the mode of operation for this module. You can choose between auto mode, forced pulse width modulation, and synchronization with an external clock, in this case, set over the digital potentiometer (or resistor). The EN pin is a precision enable input to the regulator. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Fusion for ARM v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different ARM® Cortex®-M based MCUs regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for ARM v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the Fusion for ARM v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for ARM v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Type
8th Generation
Architecture
ARM Cortex-M3
MCU Memory (KB)
1024
Silicon Vendor
STMicroelectronics
Pin count
144
RAM (Bytes)
131072
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for ARM v8 as your development board.














Track your results in real time
Application Output
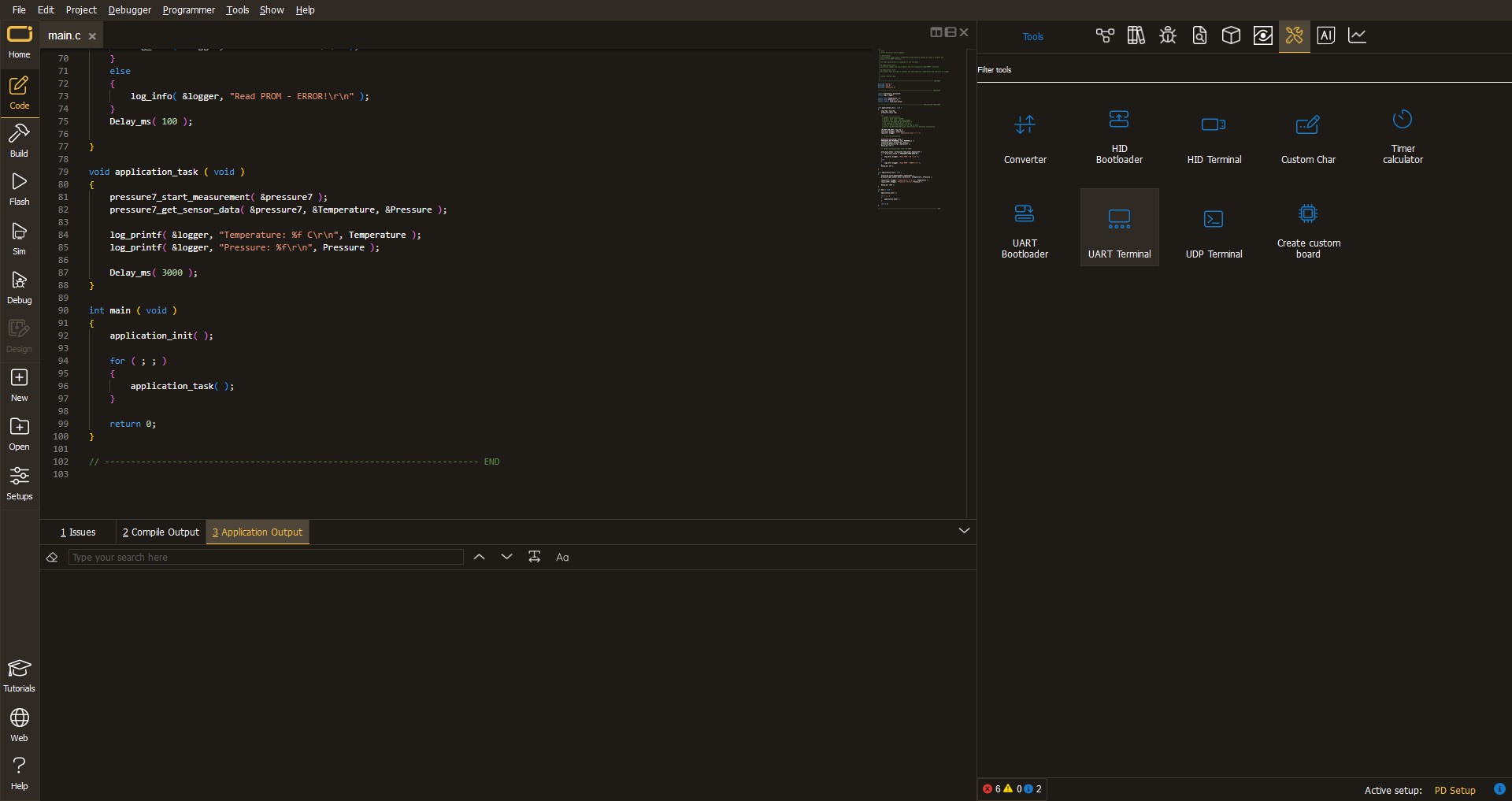
After pressing the "FLASH" button on the left-side panel, it is necessary to open the UART terminal to display the achieved results. By clicking on the Tools icon in the right-hand panel, multiple different functions are displayed, among which is the UART Terminal. Click on the offered "UART Terminal" icon.
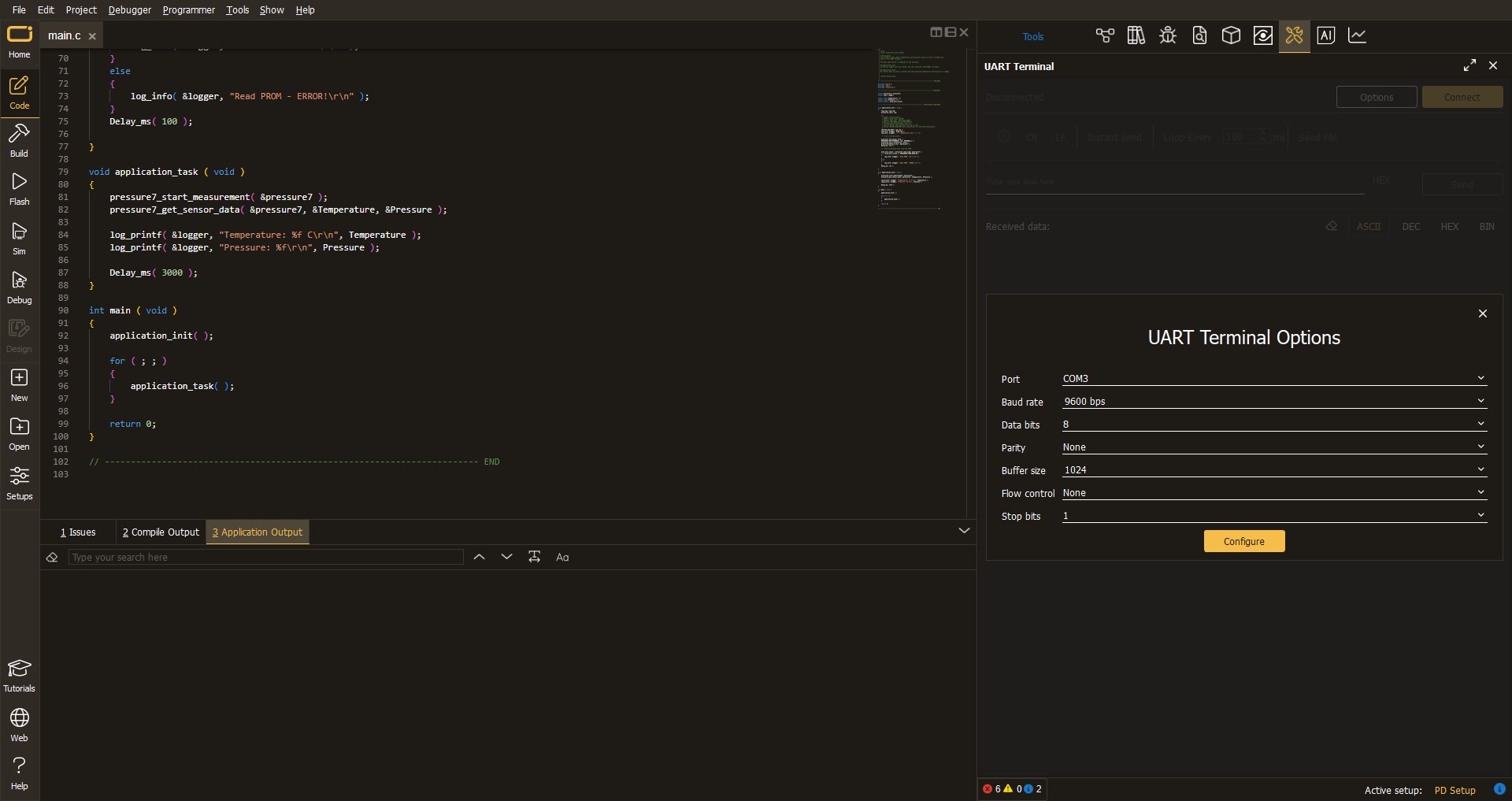
Once the UART terminal is opened, the window takes on a new form. At the top of the tab are two buttons, one for adjusting the parameters of the UART terminal and the other for connecting the UART terminal. The tab's lower part is reserved for displaying the achieved results. Before connecting, the terminal has a Disconnected status, indicating that the terminal is not yet active. Before connecting, it is necessary to check the set parameters of the UART terminal. Click on the "OPTIONS" button.
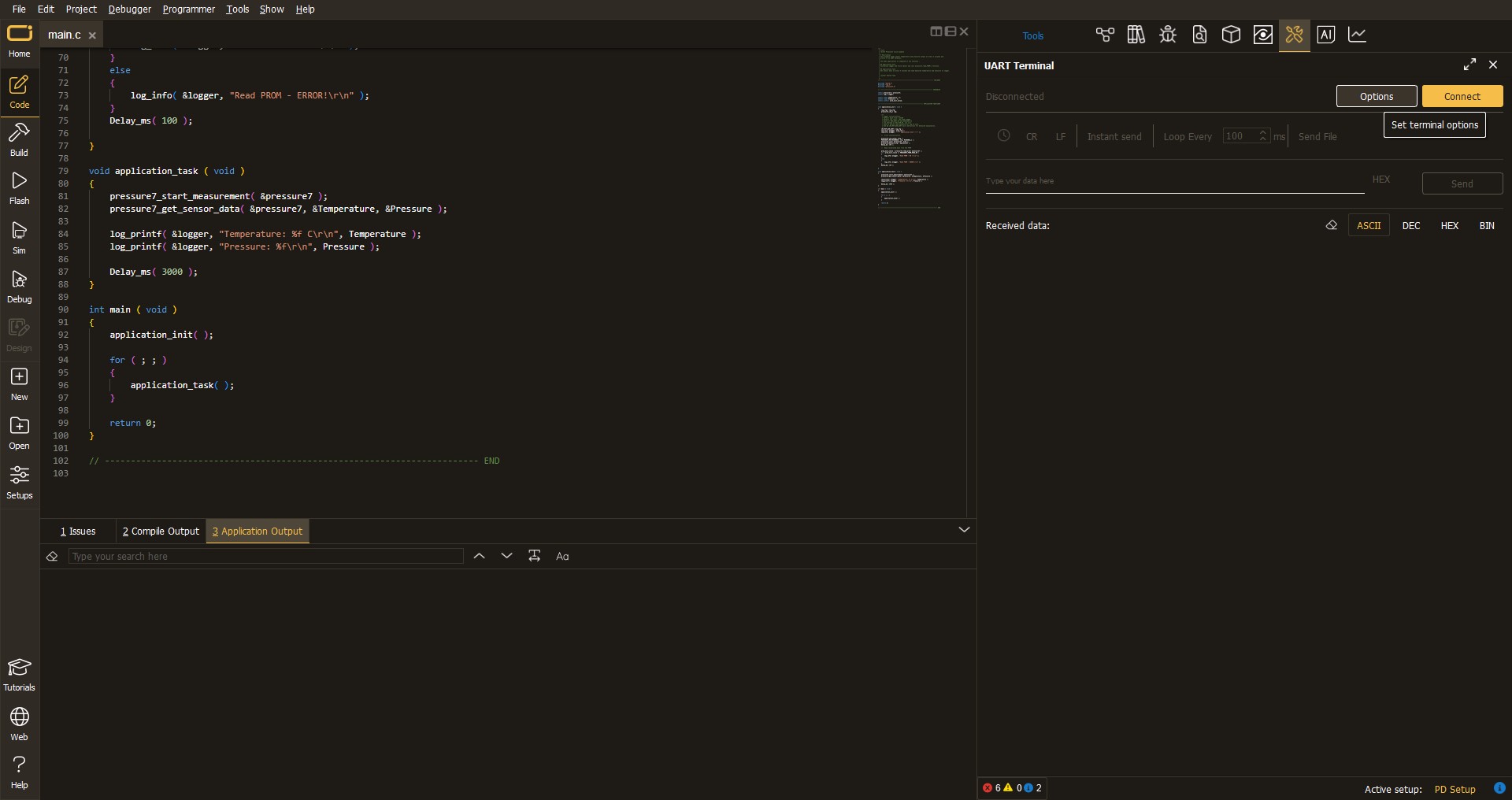
In the newly opened UART Terminal Options field, we check if the terminal settings are correct, such as the set port and the Baud rate of UART communication. If the data is not displayed properly, it is possible that the Baud rate value is not set correctly and needs to be adjusted to 115200. If all the parameters are set correctly, click on "CONFIGURE".
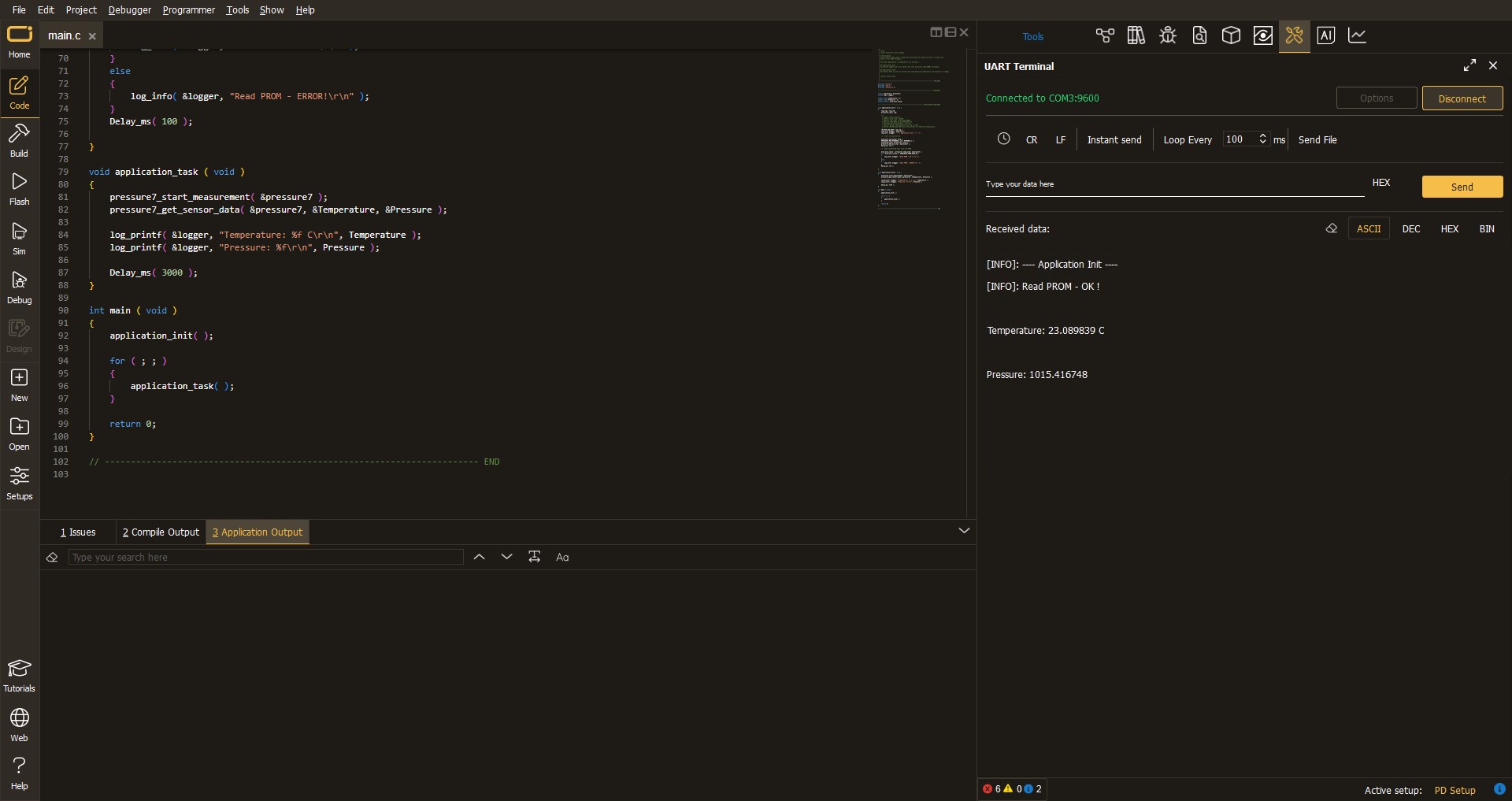
The next step is to click on the "CONNECT" button, after which the terminal status changes from Disconnected to Connected in green, and the data is displayed in the Received data field.
Software Support
Library Description
This library contains API for Step Down 10 Click driver.
Key functions:
stepdown10_get_pg_state- Step Down 10 get PG pin state function.stepdown10_set_wiper_pos- Step Down 10 set wiper position.stepdown10_set_output- Step Down 10 set output voltage.
Open Source
Code example
This example can be found in NECTO Studio. Feel free to download the code, or you can copy the code below.
/*!
* @file main.c
* @brief Step Down 10 Click example
*
* # Description
* This library contains API for the Step Down 10 Click driver.
* This driver provides the functions to set the output voltage treshold.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of I2C module and log UART.
* After driver initialization, default settings sets output voltage to 2 V.
*
* ## Application Task
* This example demonstrates the use of the Step Down 10 Click board™ by changing
* output voltage every 2 seconds starting from 2 V up to 20 V.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "stepdown10.h"
static stepdown10_t stepdown10;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
stepdown10_cfg_t stepdown10_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
stepdown10_cfg_setup( &stepdown10_cfg );
STEPDOWN10_MAP_MIKROBUS( stepdown10_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == stepdown10_init( &stepdown10, &stepdown10_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( STEPDOWN10_ERROR == stepdown10_default_cfg ( &stepdown10 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
for ( uint8_t n_cnt = STEPDOWN10_MIN_OUTPUT; n_cnt <= STEPDOWN10_MAX_OUTPUT; n_cnt++ )
{
stepdown10_set_output( &stepdown10, ( float ) n_cnt );
log_printf( &logger, " Output voltage %d V\r\n", ( uint16_t ) n_cnt );
Delay_ms( 2000 );
}
}
int main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END















