Step into the future of navigation with LG77L and PIC18F4610, where precision reigns supreme
Explore with our GNSS revolution
Published Sep 02, 2023
Click board™
GNSS 13 Click
Dev. board
EasyPIC v7
Compiler
NECTO Studio
MCU
PIC18F4610
Navigate confidently, knowing that each turn and destination is guided by the highest level of precision and reliability
A
A
Hardware Overview
How does it work?
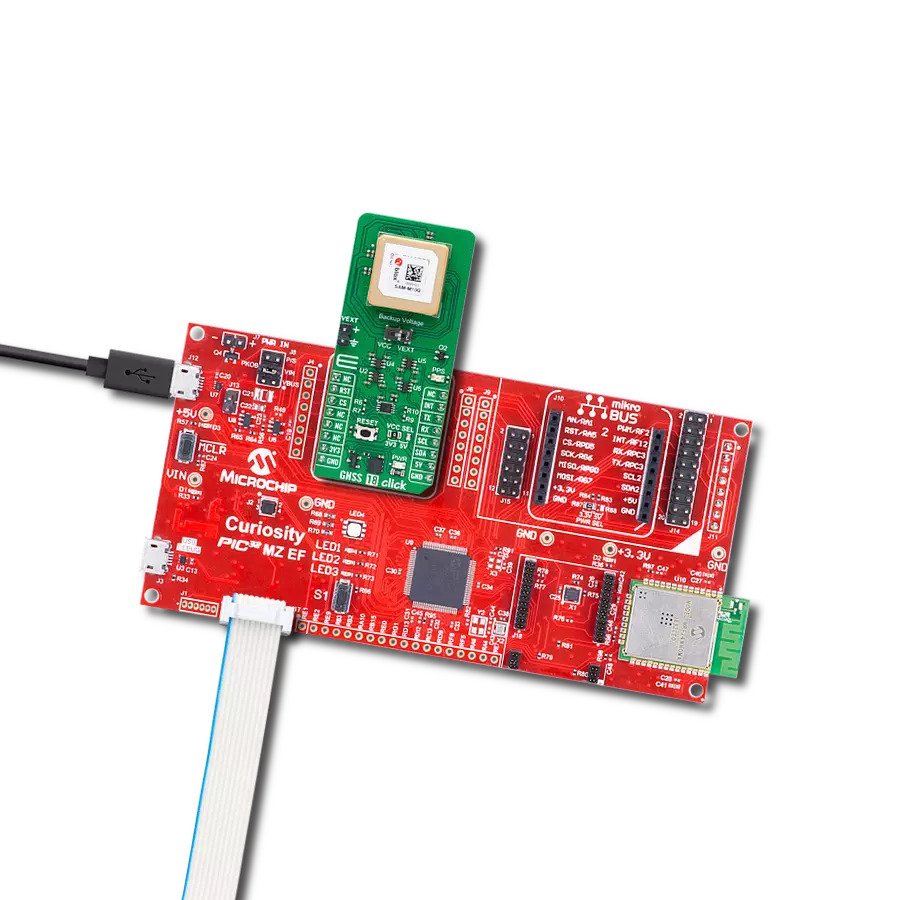
GNSS 13 Click is based on the LG77LICMD, a multi-constellation GNSS module with low power consumption from Quectel Wireless Solutions. It supports concurrent reception of up to three GNSS systems - GPS, GLONASS (or BeiDou), Galileo, and SBAS signals. Compared with single GPS systems, enabling multiple GNSS systems increases the number of visible satellites, reduces the time to a first fix, and improves positioning accuracy, especially in GNSS-hostile environments. By combining EASY™ (Embedded Assist System), an advanced AGNSS feature, with GLP (GNSS Low Power) low power mode, the LG77LICMD achieves high performance, low power consumption, and fully meets industrial standards. The EASY™ technology allows the LG77LICMD to automatically calculate and predict orbits using the ephemeris data (up to 3 days duration) stored in the internal RAM. As a result, the GNSS 13 Click can acquire a fixed position quickly, even at lower signal levels. With the GLP technology, on the other hand, the LG77LICMD can adaptively adjust the ON/OFF time based on the environmental
and motion conditions to achieve a balance between positioning accuracy and power consumption. This Click board™ comes with a configurable host interface that allows communication with MCU using the selected interface. The LG77LICMD can communicate with the MCU using the UART interface with commonly used UART RX and TX pins as its default communication protocol, operating at 115200bps to transmit and exchange data with the host MCU or using the optional I2C interface. The I2C interface is compatible with the Fast-Mode, allowing a maximum bit rate of 400kbit/s. Since the sensor for operation requires a logic voltage level of 1.8V, this Click board™ also features the TLV700, a 1.8V LDO, and an NVT2008 voltage-level translator. The UART and I2C bus lines are routed to the voltage-level translators, allowing this Click board™ to work with 3.3V MCU properly. In addition to all these features, this board has a WUP pin for waking up the module from Backup mode, a general reset feature, as well as several unpopulated headers such as 3DF to indicate
successful positioning, a JAM pin to indicate whether there is any signal jamming, and ANT header with OK and OFF pins for active antenna status detection purposes. GNSS 13 Click possesses the SMA antenna connector on which an appropriate active antenna connects that MIKROE offers for improved range and received signal strength. Also, in the case of the primary supply failure, the module can use a backup supply voltage from a connected battery if you need the Click board™ to be a standalone device. In addition to precise positioning, the GNSS 13 Click also has an accurate timing signal indicated through a red LED indicator marked as PPS. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
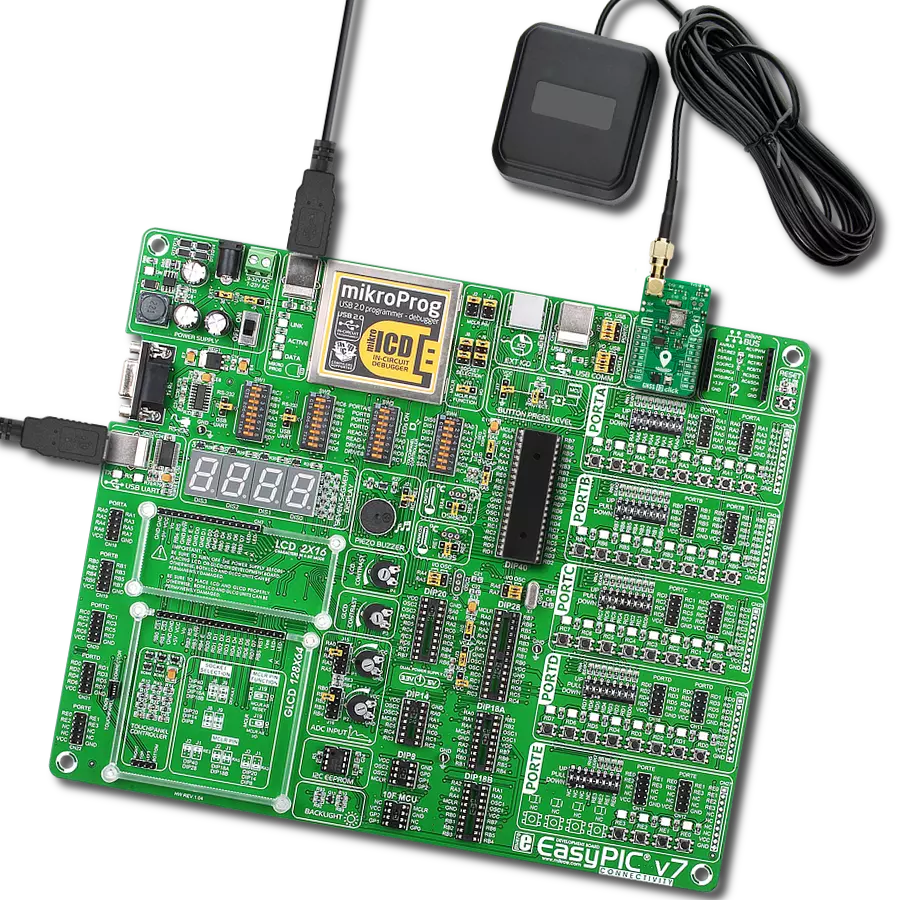
EasyPIC v7 is the seventh generation of PIC development boards specially designed to develop embedded applications rapidly. It supports a wide range of 8-bit PIC microcontrollers from Microchip and has a broad set of unique functions, such as a powerful onboard mikroProg programmer and In-Circuit debugger over USB-B. The development board is well organized and designed so that the end-user has all the necessary elements in one place, such as switches, buttons, indicators, connectors, and others. With four different connectors for each port, EasyPIC v7 allows you to connect accessory boards, sensors, and custom electronics more efficiently than ever. Each part of
the EasyPIC v7 development board contains the components necessary for the most efficient operation of the same board. An integrated mikroProg, a fast USB 2.0 programmer with mikroICD hardware In-Circuit Debugger, offers many valuable programming/debugging options and seamless integration with the Mikroe software environment. Besides it also includes a clean and regulated power supply block for the development board. It can use various external power sources, including an external 12V power supply, 7-23V AC or 9-32V DC via DC connector/screw terminals, and a power source via the USB Type-B (USB-B) connector. Communication options such as
USB-UART and RS-232 are also included, alongside the well-established mikroBUS™ standard, three display options (7-segment, graphical, and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 8-bit PIC MCUs, from PIC10F, PIC12F, PIC16F, PIC16Enh, PIC18F, PIC18FJ, and PIC18FK families. EasyPIC v7 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC
MCU Memory (KB)
64
Silicon Vendor
Microchip
Pin count
40
RAM (Bytes)
3968
You complete me!
Accessories
GNSS L1/L5 Active External Antenna (YB0017AA) is an active patch antenna from Quectel that supports GNSS L1/L5 BD B1/B2 GLONASS L1, offering excellent performance with its high gain and efficiency for fleet management, navigation, RTK, and many other tracking applications. The magnetic-mounting antenna, with dimensions of 61.5×56.5×23mm, is designed to work with various ground plane sizes or in free space and is connected to the device by a 3m cable with an SMA male connector.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyPIC v7 as your development board.















Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for GNSS 13 Click driver.
Key functions:
gnss13_generic_read- This function reads a desired number of data bytes from the modulegnss13_parse_gngga- This function parses the GNGGA data from the read response buffergnss13_clear_ring_buffers- This function clears UART tx and rx ring buffers.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief GNSS 13 Click Example.
*
* # Description
* This example demonstrates the use of GNSS 13 Click by reading and displaying
* the GPS coordinates.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and logger.
*
* ## Application Task
* Reads the received data, parses the GNGGA info from it, and once it receives
* the position fix it will start displaying the coordinates on the USB UART.
*
* ## Additional Function
* - static void gnss13_clear_app_buf ( void )
* - static err_t gnss13_process ( gnss13_t *ctx )
* - static void gnss13_parser_application ( gnss13_t *ctx, char *rsp )
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "gnss13.h"
#include "string.h"
#define PROCESS_BUFFER_SIZE 200
static gnss13_t gnss13;
static log_t logger;
static uint8_t app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
/**
* @brief GNSS 13 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @return None.
* @note None.
*/
static void gnss13_clear_app_buf ( void );
/**
* @brief GNSS 13 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #gnss13_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t gnss13_process ( gnss13_t *ctx );
/**
* @brief GNSS 13 parser application function.
* @details This function parses GNSS data and logs it on the USB UART. It clears app and ring buffers
* after successfully parsing data.
* @param[in] ctx : Click context object.
* See #gnss13_t object definition for detailed explanation.
* @param[in] rsp Response buffer.
* @return None.
* @note None.
*/
static void gnss13_parser_application ( gnss13_t *ctx, uint8_t *rsp );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
gnss13_cfg_t gnss13_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
gnss13_cfg_setup( &gnss13_cfg );
GNSS13_MAP_MIKROBUS( gnss13_cfg, MIKROBUS_1 );
if ( UART_ERROR == gnss13_init( &gnss13, &gnss13_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( GNSS13_OK == gnss13_process( &gnss13 ) )
{
if ( PROCESS_BUFFER_SIZE == app_buf_len )
{
gnss13_parser_application( &gnss13, app_buf );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void gnss13_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static err_t gnss13_process ( gnss13_t *ctx )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t rx_size = 0;
rx_size = gnss13_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = app_buf_len;
if ( ( ( app_buf_len + rx_size ) > PROCESS_BUFFER_SIZE ) && ( app_buf_len > 0 ) )
{
buf_cnt = PROCESS_BUFFER_SIZE - ( ( app_buf_len + rx_size ) - PROCESS_BUFFER_SIZE );
memmove ( app_buf, &app_buf[ PROCESS_BUFFER_SIZE - buf_cnt ], buf_cnt );
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ buf_cnt++ ] = rx_buf[ rx_cnt ];
if ( app_buf_len < PROCESS_BUFFER_SIZE )
{
app_buf_len++;
}
}
}
return GNSS13_OK;
}
return GNSS13_ERROR;
}
static void gnss13_parser_application ( gnss13_t *ctx, uint8_t *rsp )
{
uint8_t element_buf[ 100 ] = { 0 };
if ( GNSS13_OK == gnss13_parse_gngga( rsp, GNSS13_GNGGA_LATITUDE, element_buf ) )
{
static uint8_t wait_for_fix_cnt = 0;
if ( strlen( element_buf ) > 0 )
{
log_printf( &logger, "\r\n Latitude: %.2s degrees, %s minutes \r\n", element_buf, &element_buf[ 2 ] );
gnss13_parse_gngga( rsp, GNSS13_GNGGA_LONGITUDE, element_buf );
log_printf( &logger, " Longitude: %.3s degrees, %s minutes \r\n", element_buf, &element_buf[ 3 ] );
memset( element_buf, 0, sizeof( element_buf ) );
gnss13_parse_gngga( rsp, GNSS13_GNGGA_ALTITUDE, element_buf );
log_printf( &logger, " Altitude: %s m \r\n", element_buf );
wait_for_fix_cnt = 0;
}
else
{
if ( wait_for_fix_cnt % 5 == 0 )
{
log_printf( &logger, " Waiting for the position fix...\r\n\n" );
wait_for_fix_cnt = 0;
}
wait_for_fix_cnt++;
}
gnss13_clear_ring_buffers( ctx );
gnss13_clear_app_buf( );
Delay_ms ( 500 );
}
}
// ------------------------------------------------------------------------ END