Immediately seize and safeguard essential data in the event of a power disruption with CY15B116QSN and PIC18F97J60
Unlock the future of memory

Published Aug 29, 2023
Click board™
Excelon-Ultra Click
Dev. board
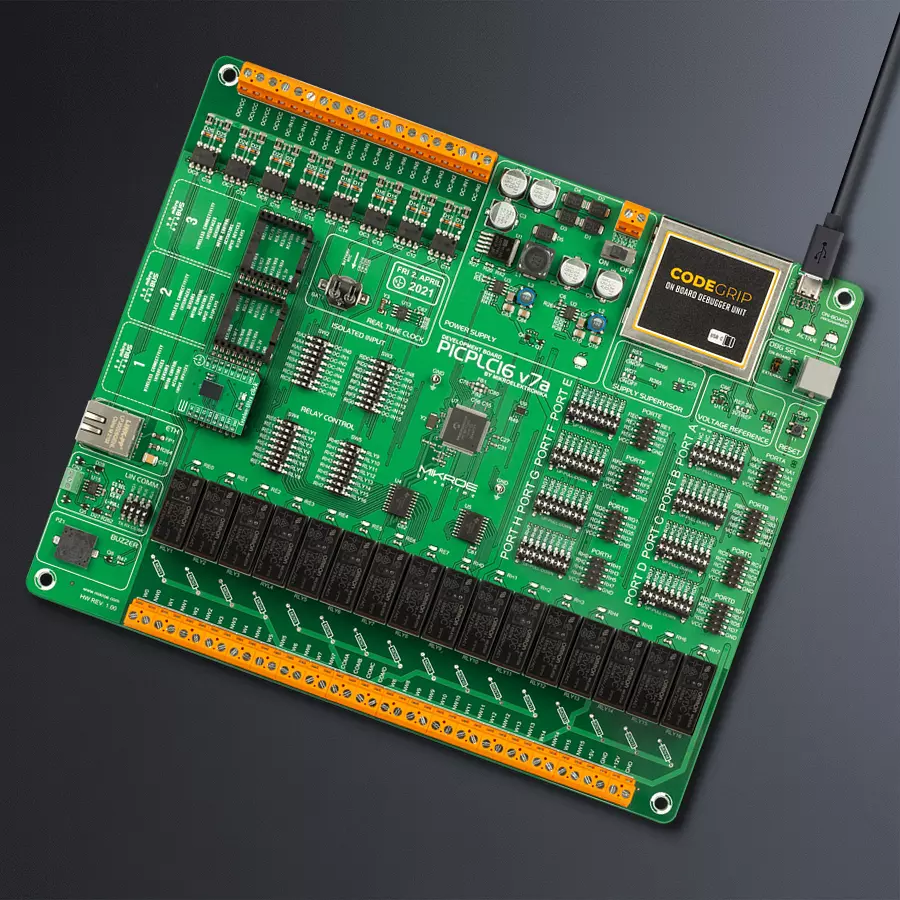
PICPLC16 v7a
Compiler
NECTO Studio
MCU
PIC18F97J60
Boost the efficiency and speed of your design with FRAM memory technology
A
A
Hardware Overview
How does it work?
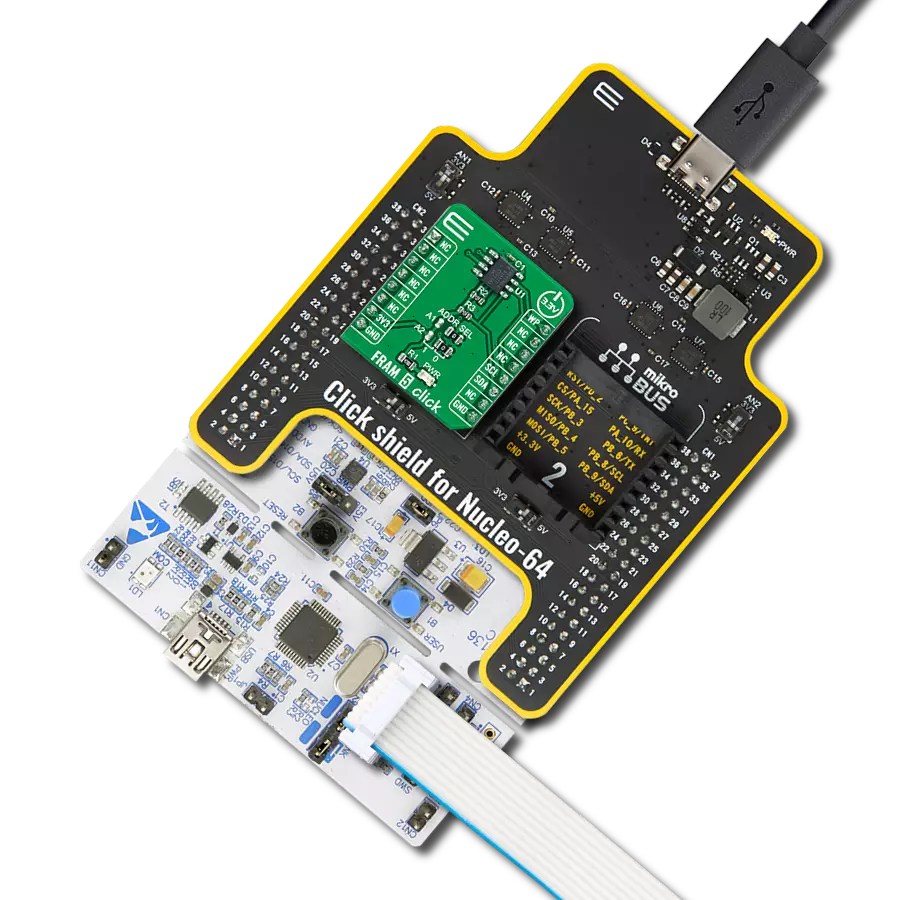
Excelon-Ultra Click is based on the CY15B116QSN, a high-performance 16-Mbit nonvolatile memory employing an advanced Infineon ferroelectric process. The memory array is logically organized as 2,097,152 × 8 bits and is accessed using an industry-standard serial peripheral interface (SPI) bus. The CY15B116QSN combines a 16-Mbit F-RAM with the high-speed Quad SPI SDR and DDR interfaces, enhancing FRAM technology's nonvolatile write capability. The key differences between the CY15B116QSN and a serial flash are the FRAM's superior write performance, high endurance, and lower power consumption. The CY15B116QSN is ideal for nonvolatile memory applications requiring frequent or rapid writes. Examples range from data collection, where the number of write cycles may be critical, to demanding industrial controls, where the long
write time of serial Flash can cause data loss. Excelon-Ultra Click communicates with MCU using an industry-standard SPI interface supporting the two most common modes, SPI Mode 0 and 3, with a maximum frequency 108MHz. Data is written to the memory array immediately after each byte is successfully transferred to the device. The following bus cycle can commence without the need for data polling. It supports 1e14 read/write cycles, or 100 million times more write cycles than EEPROM. In addition, the CY15B116QSN offers substantial write endurance compared to other nonvolatile memories. Furthermore, this Click board™ provides additional hardware-controlled functions. The configurable Write Protection function routed on the PWM pin of the mikroBUS™ socket protects all registers (including status and
configuration) from write operations when the SRWD bit (SR1[7]) is set to '1'. The WP pin must be held high to inhibit all the write operations to registers. When this pin is high, all memory and register writes are prohibited, and the address counter is not incremented. Also, it has a Reset feature routed to the RST pin on the mikroBUS™ socket, which, with a low logic level, puts the CY15B116QSN into a Reset state and, with a high level, operates the module normally. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.


Features overview
Development board
PICPLC16 v7a is the seventh generation of PIC development boards, providing an environment for experimenting with industrial devices. It comes with an onboard 8-bit PIC microcontroller, the PIC18F97J60 from Microchip, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over USB-C. The development board also consists of 16 opto-inputs and 16 relays for currents up to 16A. It is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, and connectors, in one place. With eight connectors for each port, PICPLC16 v7a
allows you to develop PIC-based industrial, home, or office automation applications more efficiently than ever. Each part of the PICPLC16 v7a development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply block for the development board. It can use a wide range of external power sources, including an external 12V
power supply, 7-23V AC or 9-32V DC via DC connector/screw terminals, and a power source via the USB Type-C (USB-C) connector. Communication options such as LIN and Ethernet are also included, alongside the well-established mikroBUS™ standard. PICPLC16 v7a is an integral part of the Mikroe ecosystem for rapid industrial development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
3808
Used MCU Pins
mikroBUS™ mapper
Take a closer look
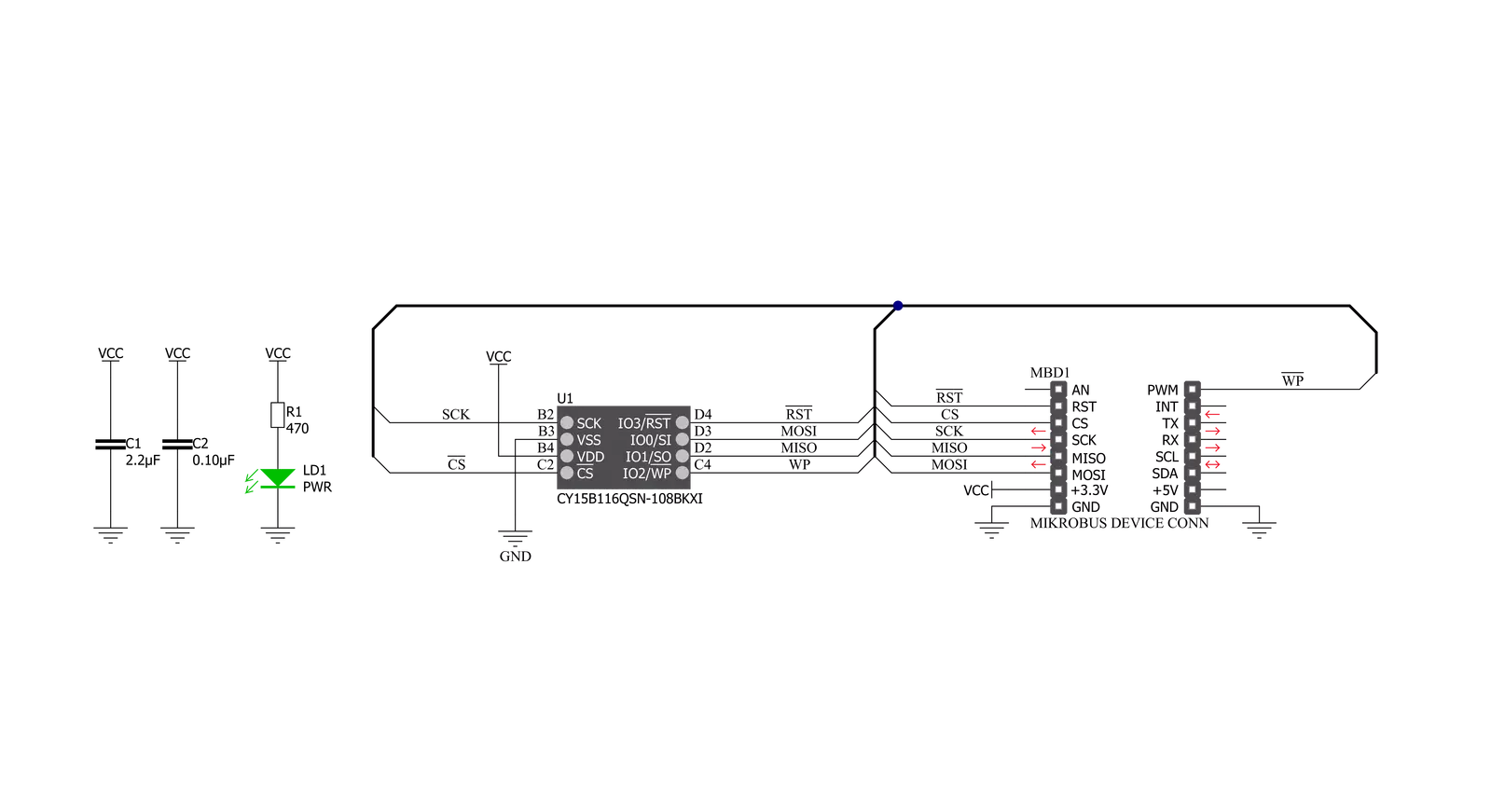
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the PICPLC16 v7a as your development board.











Software Support
Library Description
This library contains API for Excelon-Ultra Click driver.
Key functions:
excelonultra_write_data_to_memory- Write data starting from specified memory addressexcelonultra_read_data_from_memory- Read data starting from specified memory addressexcelonultra_clear_data_from_memory-Clears data starting from specified memory address
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief ExcelonUltra Click example
*
* # Description
* This example is showcase of device and it's library abillity.
* In this example is shown device ID, ability to manipulate with memory.
* After default configuration device IDs are logged. After that application
* Writes data to memory, reads data from memory, clears data from memory and
* checks if data is cleard by reading that same memory address.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes MCU modules for communication used in this application (UART, SPI).
* Calls default configuration that resets device, reads IDs, and enables writing to
* memory and sets all RAM memory to be free for conrol.
*
* ## Application Task
* Write data to memory, read data from memory. After that clears that memory address,
* and checks if it's cleared by reading data. On every iteration of the fucntion
* writing data is changed between "MikroE" and "Excelon-Ultra Click"
*
* @author Luka Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "excelonultra.h"
#define MIKROE_DATA "MikroE"
#define CLICK_DATA "Excelon-Ultra Click"
static excelonultra_t excelonultra;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
excelonultra_cfg_t excelonultra_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
excelonultra_cfg_setup( &excelonultra_cfg );
EXCELONULTRA_MAP_MIKROBUS( excelonultra_cfg, MIKROBUS_1 );
err_t init_flag = excelonultra_init( &excelonultra, &excelonultra_cfg );
if ( init_flag == SPI_MASTER_ERROR )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
excelonultra_default_cfg ( &excelonultra );
log_printf( &logger, " > Manufacturer ID: 0x%.4X\r\n", excelonultra.manufacturer_id );
log_printf( &logger, " > Product ID: 0x%.4X\r\n", excelonultra.product_id );
log_printf( &logger, " > Density ID: 0x%.2X\r\n", excelonultra.density_id );
log_printf( &logger, " > Die Rev: 0x%.2X\r\n", excelonultra.die_rev );
log_printf( &logger, " > Unique ID: 0x%.2X" , excelonultra.unique_id[ 7 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 6 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 5 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 4 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 3 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 2 ] );
log_printf( &logger, "%.2X" , excelonultra.unique_id[ 1 ] );
log_printf( &logger, "%.2X\r\n" , excelonultra.unique_id[ 0 ] );
Delay_ms ( 1000 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
static uint32_t memory_address = 0x00000055;
static uint8_t data_selection = 1;
static uint8_t write_len;
char to_write[ 50 ] = { 0 };
char read_from[ 50 ] = { 0 };
if (data_selection)
{
strcpy( to_write, MIKROE_DATA );
data_selection = !data_selection;
}
else
{
strcpy( to_write, CLICK_DATA );
data_selection = !data_selection;
}
write_len = strlen( to_write );
log_printf( &logger, " > Writing data to memory: %s\r\n", to_write );
excelonultra_write_data_to_memory( &excelonultra, memory_address, to_write, write_len );
Delay_ms ( 500 );
excelonultra_read_data_from_memory( &excelonultra, memory_address, read_from, write_len );
log_printf( &logger, " > Read data from memory: %s\r\n", read_from );
Delay_ms ( 500 );
log_printf( &logger, " > Clearing data from memory\r\n" );
excelonultra_clear_data_from_memory( &excelonultra, memory_address, write_len );
Delay_ms ( 500 );
excelonultra_read_data_from_memory( &excelonultra, memory_address, read_from, write_len );
log_printf( &logger, " > Read data from memory: %s\r\n", read_from );
log_printf( &logger, "***********************************\r\n" );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:FRAM