Create a high-efficiency power manager with LTC3586 and MK22FN512VLH12
The future of battery management

Published Aug 03, 2023
Click board™
BATT-MAN Click
Dev. board
Kinetis Clicker
Compiler
NECTO Studio
MCU
MK22FN512VLH12
Manage power and charge LiPo batteries with multiple regulated outputs and built-in safety features
A
A
Hardware Overview
How does it work?
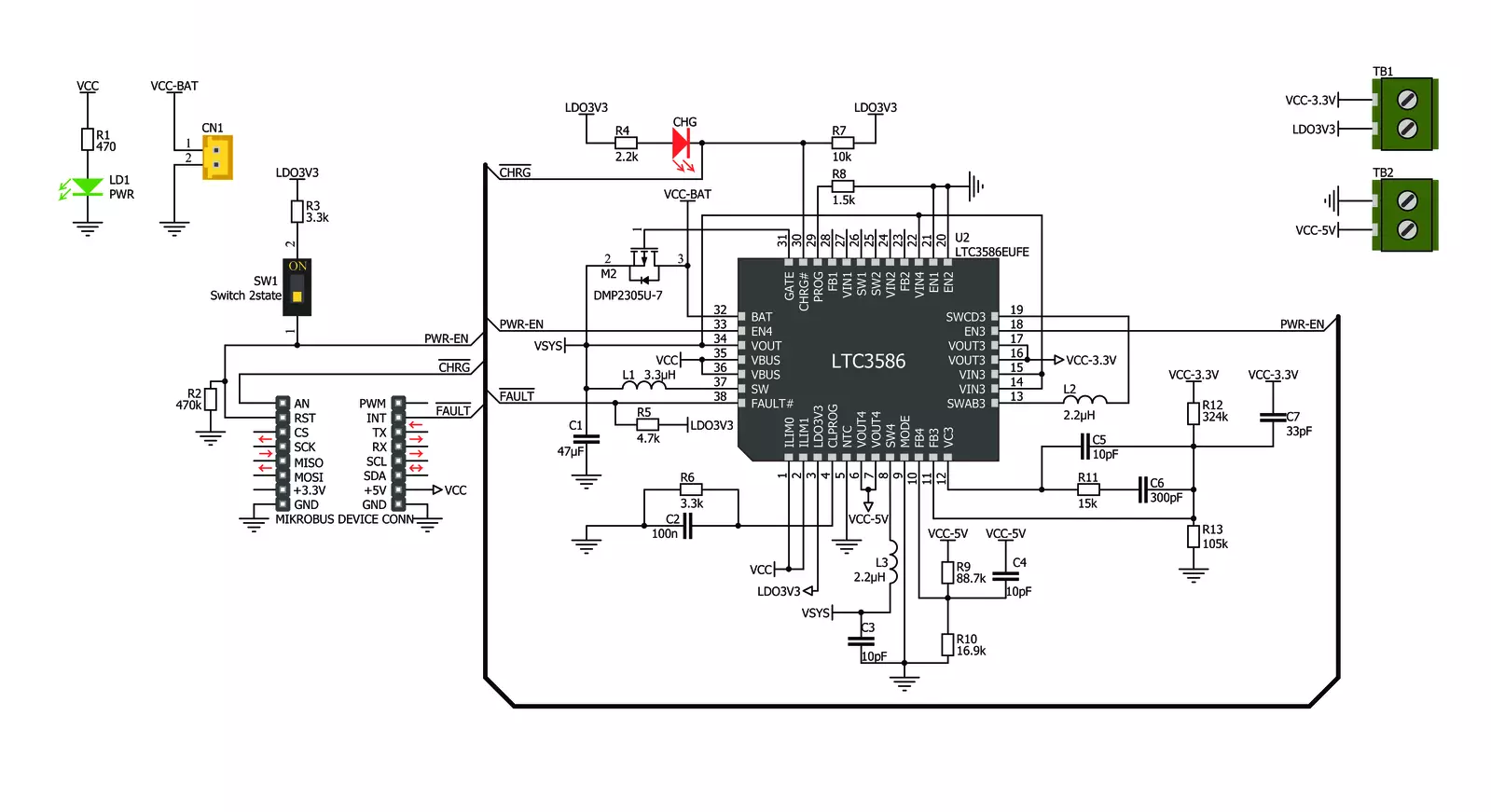
BATT-MAN Click is based on the LTC3586, an integrated high-efficiency power manager from Analog Devices that features a versatile combination of switching regulators - boost, buck-boost, and dual buck converters - alongside an intelligent PowerPath™ controller with Bat-Track™ adaptive output control for optimized power flow and system stability. This board is a compact power management solution that combines advanced battery charging and multiple regulated power outputs on a single board. This Click board™ offers three independent regulated outputs. A low-current 3.3V LDO output supplies up to 30mA, ideal for light loads and always active by default. A high-current 3.3V output supports up to 1A, while an additional 5V output delivers up to 800mA, both suitable for more demanding applications. All outputs are conveniently accessible via onboard
screw terminals, ensuring a secure and flexible connection to external devices. BATT-MAN Click includes a full-featured LiPo battery charger with constant current/constant voltage control, automatic recharge, trickle charging for low-voltage cells, and safety features such as bad cell detection and timeout-based termination. The battery float voltage is fixed at 4.2V, matching the LiPo batteries available from the MIKROE shop. An onboard CHG status indicator provides real-time feedback on the charging process through a red LED, driven by an open-drain CHG pin that signals charging, standby, or battery fault conditions. Robust system monitoring is enhanced by the FLT pin, which detects output faults by monitoring the feedback voltages of the switching converters. In the event of a regulation failure, this bidirectional pin pulls LOW and disables all converters. It can
also be used externally to shut down the regulators manually. The device supports flexible startup and control. An onboard EN Vout switch (SW1) allows manual activation of outputs even without 5V mikroBUS™ power, as long as a LiPo battery is connected. Regulator enable lines are routed to the mikroBUS™ EN pin, allowing MCU-based control. In addition to screw terminals for power outputs, a standard 2.54mm battery connector is provided for seamless integration of a LiPo battery. This Click board™ can be operated only with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. It also comes equipped with a library containing functions and example code that can be used as a reference for further development.

Features overview
Development board
Kinetis Clicker is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4 microcontroller, the MK22FN512VLH12 from NXP Semiconductor, a USB connector, LED indicators, buttons, a mikroProg connector, and a header for interfacing with external electronics. Thanks to its compact design with clear and easy-recognizable silkscreen markings, it provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances. Each part of the Kinetis Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Kinetis Clicker programming method, using USB HID mikroBootloader, or through an external mikroProg connector for Kinetis programmer, the Clicker board also includes a clean and regulated power supply module for the development kit. The USB-MiniAB connection provides up to 500mA of current, which is more than enough to operate all
onboard and additional modules. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several buttons and LED indicators. Kinetis Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
512
Silicon Vendor
NXP
Pin count
64
RAM (Bytes)
131072
You complete me!
Accessories
Li-Polymer Battery is the ideal solution for devices that demand a dependable and long-lasting power supply while emphasizing mobility. Its compatibility with mikromedia boards ensures easy integration without additional modifications. With a voltage output of 3.7V, the battery meets the standard requirements of many electronic devices. Additionally, boasting a capacity of 2000mAh, it can store a substantial amount of energy, providing sustained power for extended periods. This feature minimizes the need for frequent recharging or replacement. Overall, the Li-Polymer Battery is a reliable and autonomous power source, ideally suited for devices requiring a stable and enduring energy solution. You can find a more extensive choice of Li-Polymer batteries in our offer.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

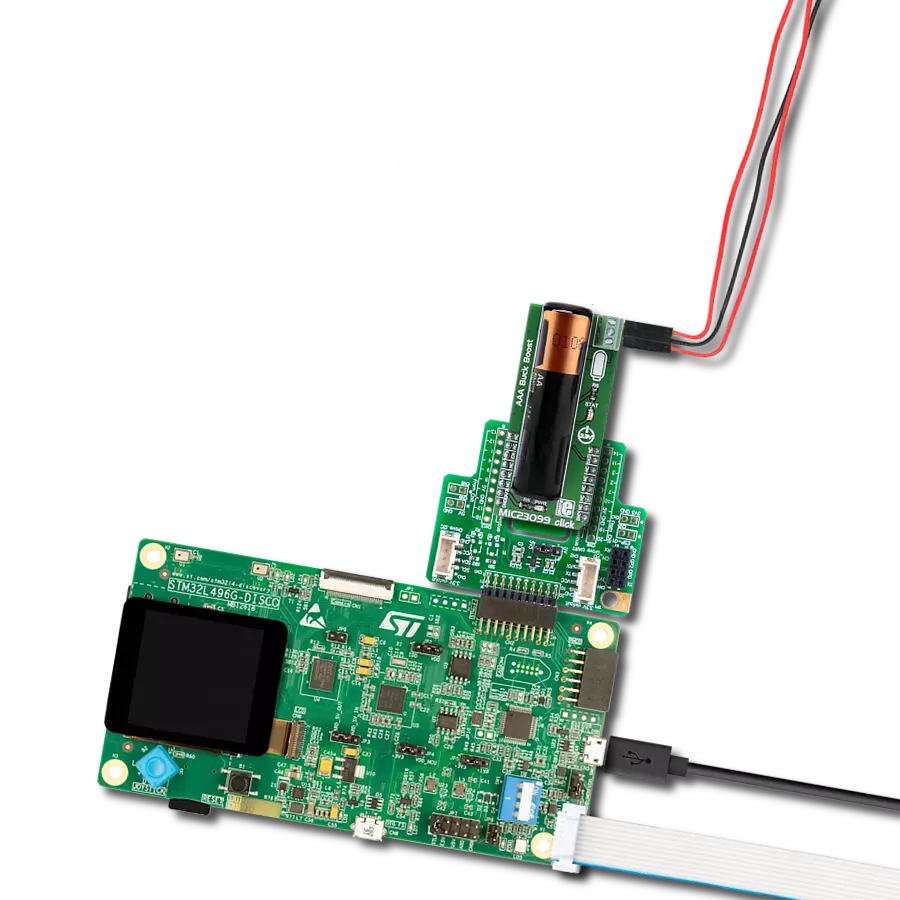
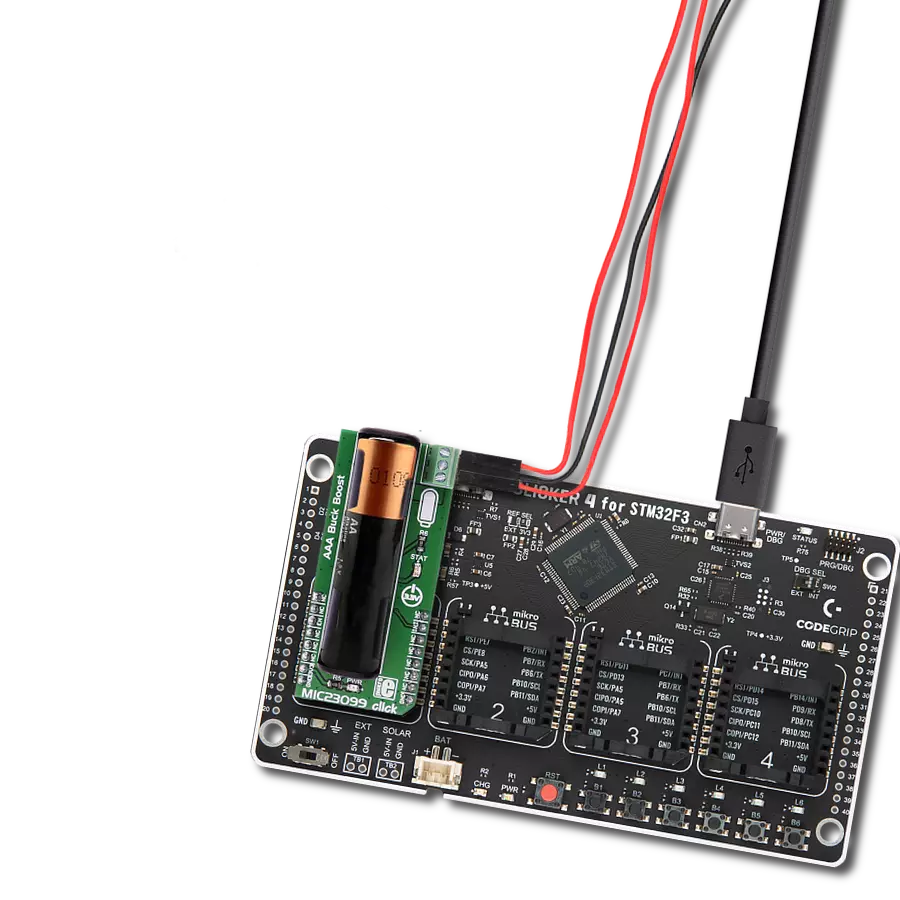
Start by selecting your development board and Click board™. Begin with the Kinetis Clicker as your development board.













Software Support
Library Description
BATT-MAN Click demo application is developed using the NECTO Studio, ensuring compatibility with mikroSDK's open-source libraries and tools. Designed for plug-and-play implementation and testing, the demo is fully compatible with all development, starter, and mikromedia boards featuring a mikroBUS™ socket.
Example Description
BATT-MAN Click is a very versatile battery operated power manager. When powered via mikroBUS, it will charge the connected Li-Ion/Li-Po 3.7V battery, while providing the output voltage on all its outputs at the same time.
Key functions:
battman_cfg_setup- Config Object Initialization function.battman_init- Initialization function.battman_set_enable- Controls the operation of the Click.battman_get_charging_indicator- Charging indicator status.
Application Init
Initializes the Click driver and logger utility and enables the Click board.
Application Task
Checks the charging indicator status, and in relation to its state it displays an appropriate message on USB UART.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief BATT-MAN Click example
*
* # Description
* BATT-MAN Click is a very versatile battery operated power manager. When powered via mikroBUS,
* it will charge the connected Li-Ion/Li-Po 3.7V battery, while providing the output voltage
* on all its outputs at the same time.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the Click driver and logger utility and enables the Click board.
*
* ## Application Task
* Checks the charging indicator status, and in relation to its state
* it displays an appropriate message on USB UART.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "battman.h"
// ------------------------------------------------------------------ VARIABLES
static battman_t battman;
static log_t logger;
static uint8_t chg_flag;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
battman_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
battman_cfg_setup( &cfg );
BATTMAN_MAP_MIKROBUS( cfg, MIKROBUS_1 );
battman_init( &battman, &cfg );
battman_set_enable( &battman, 1 );
log_printf( &logger, "BATT-MAN Click enabled.\r\n" );
chg_flag = 0;
}
void application_task ( void )
{
if ( !battman_get_charging_indicator ( &battman ) )
{
if ( chg_flag == 1 )
{
log_printf( &logger, "Charging enabled.\r\n" );
}
chg_flag = 0;
}
else
{
if ( chg_flag == 0 )
{
log_printf( &logger, "Charging disabled.\r\n" );
}
chg_flag = 1;
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Buck-Boost