Achieve both data transformation and isolation for enhanced safety with FT232RL and PIC24EP512GU814
Bridge the gap between USB and UART

Published Nov 07, 2023
Click board™
USB UART 4 Click
Dev. board
UNI Clicker
Compiler
NECTO Studio
MCU
PIC24EP512GU814
Elevate your USB communication to a whole new level with our isolated UART transformation, guarding your equipment against electrical disturbances
A
A
Hardware Overview
How does it work?
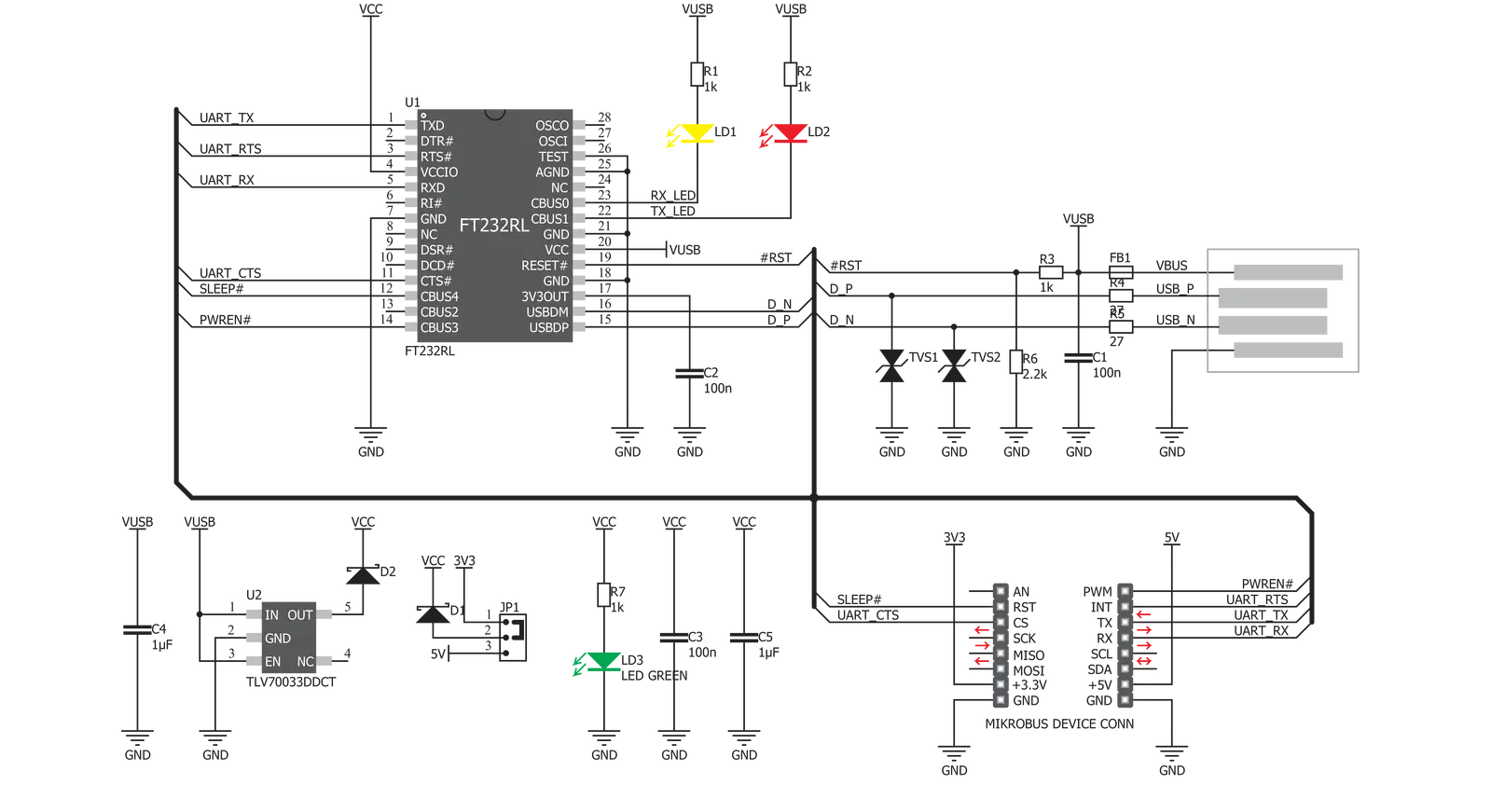
USB UART 4 Click is based on the FT232RL, a USB to UART interface IC, from FTDI. The entire USB protocol is handled on the IC itself, thus no USB specific firmware programming is required. FTDI provides royalty-free Virtual Com Port (VCP) and Direct (D2XX) drivers for all the major OSes, used on personal computers. FT232RL also contains an integrated 1024 Bit internal EEPROM for storing USB VID, PID, serial number, product description strings and CBUS I/O configuration. The Baud Rate Generator provides a 16x clock input to the UART Controller from the 48MHz reference clock. It consists of a 14-bit pre-scaler and 3 register bits which provide fine tuning of the baud rate - used to divide by a number plus a fraction. This determines the baud rate of the UART, which is programmable from 183 baud to 3 Mbaud. Also, non-standard baud rates are supported. The baud rate is automatically calculated by the FTDI driver, so it is enough to simply forward the desired baud rate to the driver, usually done by selecting the baud rate via the GUI interface of the PC terminal application. After installing the OS drivers, the device is ready to be used. When plugged in, it will create a virtual COM port. After that, it can be used
with the USART Terminal application, included in every mikroE compiler. It can be used for the data exchange between the MCU and the host computer. This device also features the configurable CBUS pins, which can be used for several different useful functions, as for example - configurable clock out for driving the microcontroller, data LED drive, USB Sleep, PWR status and so on. By default, CBUS3 and CBUS4 pins are configured as Power Enable and Sleep options and are routed to the PWM and RST pins of the mikroBUS™, respectively. More information about configuring the CBUS pins can be found in the FT232RL datasheet. CBUS3 output pin (PWM pin of the mikroBUS™) will be set to a LOW logic state during the USB suspend mode It can be used to power down external circuitry or be used for similar purposes. CBUS4 output pin (RST pin of the mikroBUS™) will be set to a LOW logic state after the device has been configured by the USB, then HIGH during the USB suspend mode. This can also be used for the powering down/power saving, by turning unneeded external circuitry. This device also supports two additional signals - RTS (Request To Send) and CTS (Clear To Send),
which can be used when the hardware flow control is required. USB UART click also features a small low noise LDO, used to provide the logic voltage level reference. The input voltage for the LDO is taken from the USB or the mikroBUS™ 5V rail. The 3.3V rail from the LDO output is routed to the SMD jumper. It allows selection of the referent voltage for the logic section of the FT232RL, thus making possible to interface the USB UART click to both 3.3V and 5V MCUs. The UART communication is indicated by two LEDs, red for TX (sending data in UART to USB direction) and yellow for RX (receiving data in USB to UART direction). These LEDs are used to provide a visual indication if there is any data transfer ongoing. One feature worth mentioning is this Click board™ specific shape - it is made so that it can be plugged directly into the USB Type A port. It doesn’t have a conventional USB connector, but the PCB is shaped so that the USB traces can be connected to the USB port. Since the FT232RL supports the unique serial number feature, this makes it handy for developing data protection devices and dongles of various kinds. However, it can also be used in a traditional way.

Features overview
Development board
UNI Clicker is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It supports a wide range of microcontrollers, such as different ARM, PIC32, dsPIC, PIC, and AVR from various vendors like Microchip, ST, NXP, and TI (regardless of their number of pins), four mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a debugger/programmer connector, and two 26-pin headers for interfacing with external electronics. Thanks to innovative manufacturing technology, it allows you to build
gadgets with unique functionalities and features quickly. Each part of the UNI Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the UNI Clicker programming method, using a third-party programmer or CODEGRIP/mikroProg connected to onboard JTAG/SWD header, the UNI Clicker board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Type-C (USB-C) connector, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or using a Li-Po/Li
Ion battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board (plus USB HOST/DEVICE), including the well-established mikroBUS™ socket, a standardized socket for the MCU card (SiBRAIN standard), and several user-configurable buttons and LED indicators. UNI Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Type
8th Generation
Architecture
dsPIC
MCU Memory (KB)
512
Silicon Vendor
Microchip
Pin count
144
RAM (Bytes)
53248
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the UNI Clicker as your development board.














Software Support
Library Description
This library contains API for USB UART 4 Click driver.
Key functions:
usbuart4_pwr_ctrl- This function sets the click turns click on.usbuart4_set_cts- This function sets CTS pin.usbuart4_send_command- This function is used for sending commands.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief USB UART 4 Click Example.
*
*# Description
* This example reads and processes data from USB UART 4 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and power module.
*
* ## Application Task
* Reads data and echos it back to device and logs it to board.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "usbuart4.h"
#include "string.h"
#define PROCESS_BUFFER_SIZE 500
static usbuart4_t usbuart4;
static log_t logger;
static char app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
usbuart4_cfg_t usbuart4_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
Delay_ms ( 100 );
// Click initialization.
usbuart4_cfg_setup( &usbuart4_cfg );
USBUART4_MAP_MIKROBUS( usbuart4_cfg, MIKROBUS_1 );
err_t init_flag = usbuart4_init( &usbuart4, &usbuart4_cfg );
if ( UART_ERROR == init_flag ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
app_buf_len = 0;
usbuart4_pwr_ctrl( &usbuart4, USBUART4_POWER_ON );
usbuart4_set_cts( &usbuart4, USBUART4_CTS_NO_ACTIVE );
usbuart4_set_mode( &usbuart4, USBUART4_MODE_NORMAL );
log_info( &logger, " Application Task " );
}
void application_task ( void ) {
app_buf_len = usbuart4_generic_read( &usbuart4, app_buf, PROCESS_BUFFER_SIZE );
if ( app_buf_len > 0 ) {
log_printf( &logger, "%s", app_buf );
memset( app_buf, 0, PROCESS_BUFFER_SIZE );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END