Control two-phase bipolar stepper motors with TB67S128FTG and PIC32MZ2048EFH100
Microstepping bipolar stepper motor driver

Published Mar 09, 2024
Click board™
Stepper 10 Click
Dev. board
Flip&Click PIC32MZ
Compiler
NECTO Studio
MCU
PIC32MZ2048EFH100
High-power motor control from full- to 1/128 micro-steps with advanced performance optimization and error detection features
A
A
Hardware Overview
How does it work?
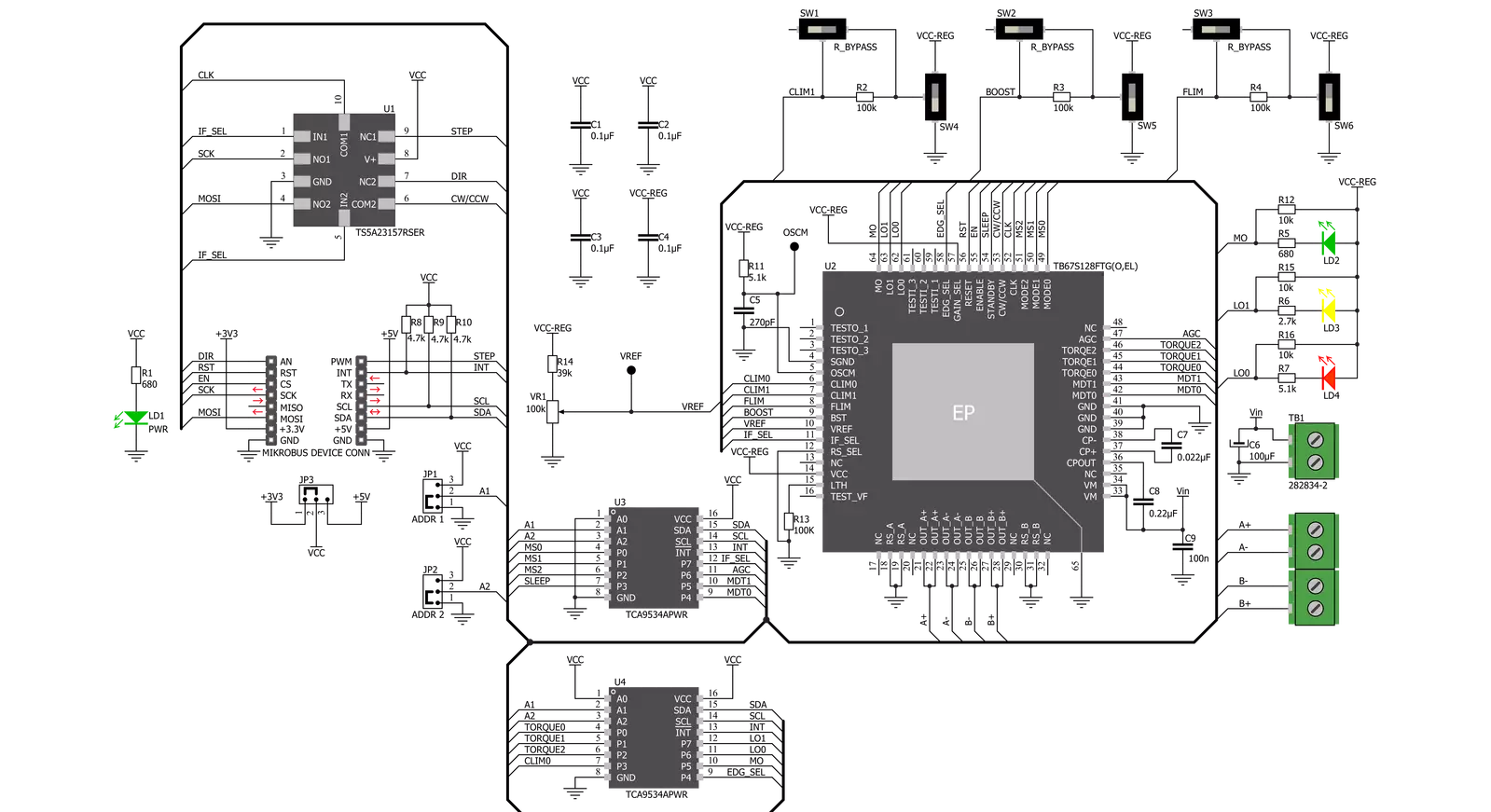
Stepper 10 Click is based on the TB67S128FTG, a two-phase bipolar stepper motor driver from Toshiba Semiconductor, which features adjustable current limiting and micro-stepping down to 1/128 step operation. Fabricated using a leading-edge BiCD process with low power consumption and low output on-resistance, the TB67S128FTG in a thermally enhanced small package helps improve efficiency and reduce the size of motor applications. This stepping motor driver incorporates a high-speed, high-precision control technology required for factory automation systems and office equipment. The chip can dynamically select an optimal decay mode by monitoring the actual motor current and automatically reduce the driving current below the full amount when the motor is lightly loaded to minimize power consumption and heat generation. The driver has a wide operating voltage range of 6.5V to 44V and can continuously deliver approximately 2.1A per phase without a heat sink or forced air flow (up to 5A peak). It features built-in protection against under-voltage, over-current, and over-temperature
conditions. There are two interface modes to select from: CLK mode for simple step and direction control and serial mode for controlling and setting the driver through a serial interface. Step resolution is configurable using MODE2, MODE1, and MODE0 by setting the appropriate pin level. Most pins are controlled using an IO expander via the I2C bus except DIR, STEP, ENABLE, and RESET routed to the mikroBUS™ socket. Stepper 10 Click has eight different step modes: full-step, half-step, 1/4-step, 1/8, 1/16, 1/32, 1/64, and 1/128. Besides that, four different decay modes are available using the MDT0 and MDT1 pins. The onboard trimmer potentiometer can be used to set the current limit to prevent damage to the motor. The actual calculation of the predefined output current can be found in the TB67S128FTG datasheet. Toshiba’s unique AGC feature stepping motor technology optimizes the drive current according to the load torque in real-time. It helps reduce unnecessary currents and drastically cut power consumption and heat generation. Stepper 10 Click has the function to detect several error states indicated by two
LEDs: LO1 and LO0. If the overcurrent is detected, the LO0 will toggle, while the LO1 represents the motor load open indication. If both LEDs are toggled, then the thermal shutdown is detected. The errors are cleared by toggling standby mode or performing a power cycle to the driver. The LED designated as MO is toggled if the driver’s electrical angle is equal to the initial value of 45°, which occurs immediately after reset or whenever the driver has stepped a full cycle. Stepper 10 Click uses the two TCA9534APWR Low-Power IO Expanders that support the I2C interface protocol. To avoid conflicts on the bus, the slave addresses can be reconfigured by SMD jumpers labeled ADDR1 and ADDR2. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Flip&Click PIC32MZ is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller, the PIC32MZ2048EFH100 from Microchip, four mikroBUS™ sockets for Click board™ connectivity, two USB connectors, LED indicators, buttons, debugger/programmer connectors, and two headers compatible with Arduino-UNO pinout. Thanks to innovative manufacturing technology,
it allows you to build gadgets with unique functionalities and features quickly. Each part of the Flip&Click PIC32MZ development kit contains the components necessary for the most efficient operation of the same board. In addition, there is the possibility of choosing the Flip&Click PIC32MZ programming method, using the chipKIT bootloader (Arduino-style development environment) or our USB HID bootloader using mikroC, mikroBasic, and mikroPascal for PIC32. This kit includes a clean and regulated power supply block through the USB Type-C (USB-C) connector. All communication
methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, user-configurable buttons, and LED indicators. Flip&Click PIC32MZ development kit allows you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
You complete me!
Accessories
The 28BYJ-48 is an adaptable 5VDC stepper motor with a compact design, ideal for various applications. It features four phases, a speed variation ratio of 1/64, and a stride angle of 5.625°/64 steps, allowing precise control. The motor operates at a frequency of 100Hz and has a DC resistance of 50Ω ±7% at 25°C. It boasts an idle in-traction frequency greater than 600Hz and an idle out-traction frequency exceeding 1000Hz, ensuring reliability in different scenarios. With a self-positioning torque and in-traction torque both exceeding 34.3mN.m at 120Hz, the 28BYJ-48 offers robust performance. Its friction torque ranges from 600 to 1200 gf.cm, while the pull-in torque is 300 gf.cm. This motor makes a reliable and efficient choice for your stepper motor needs.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Flip&Click PIC32MZ as your development board.














Software Support
Library Description
This library contains API for Stepper 10 Click driver.
Key functions:
stepper10_set_direction- This function sets the motor direction by setting the DIR pin logic statestepper10_set_step_mode- This function sets the step mode resolution settingsstepper10_drive_motor- This function drives the motor for the specific number of steps at the selected speed
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Stepper 10 Click example
*
* # Description
* This example demonstrates the use of the Stepper 10 Click board by driving the
* motor in both directions for a desired number of steps.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Drives the motor clockwise for 200 full steps and then counter-clockiwse for 200 half
* steps and 400 quarter steps with 2 seconds delay on driving mode change. All data is
* being logged on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "stepper10.h"
static stepper10_t stepper10;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
stepper10_cfg_t stepper10_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
stepper10_cfg_setup( &stepper10_cfg );
STEPPER10_MAP_MIKROBUS( stepper10_cfg, MIKROBUS_1 );
err_t init_flag = stepper10_init( &stepper10, &stepper10_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( STEPPER10_ERROR == stepper10_default_cfg ( &stepper10 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
log_printf ( &logger, " Move 200 full steps clockwise, speed: slow\r\n\n" );
stepper10_set_direction ( &stepper10, STEPPER10_DIR_CW );
stepper10_set_step_mode ( &stepper10, STEPPER10_MODE_FULL_STEP );
stepper10_drive_motor ( &stepper10, 200, STEPPER10_SPEED_SLOW );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf ( &logger, " Move 200 half steps counter-clockwise, speed: medium\r\n\n" );
stepper10_set_direction ( &stepper10, STEPPER10_DIR_CCW );
stepper10_set_step_mode ( &stepper10, STEPPER10_MODE_HALF_STEP );
stepper10_drive_motor ( &stepper10, 200, STEPPER10_SPEED_MEDIUM );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf ( &logger, " Move 400 quarter steps counter-clockwise, speed: fast\r\n\n" );
stepper10_set_direction ( &stepper10, STEPPER10_DIR_CCW );
stepper10_set_step_mode ( &stepper10, STEPPER10_MODE_QUARTER_STEP );
stepper10_drive_motor ( &stepper10, 400, STEPPER10_SPEED_FAST );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Stepper