Create the next generation of wireless-connected and configurable equipment with with ANNA-B412 and PIC32MZ2048EFM100
Power your innovations with the latest in Bluetooth technology

Published Nov 13, 2023
Click board™
ANNA-B412 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
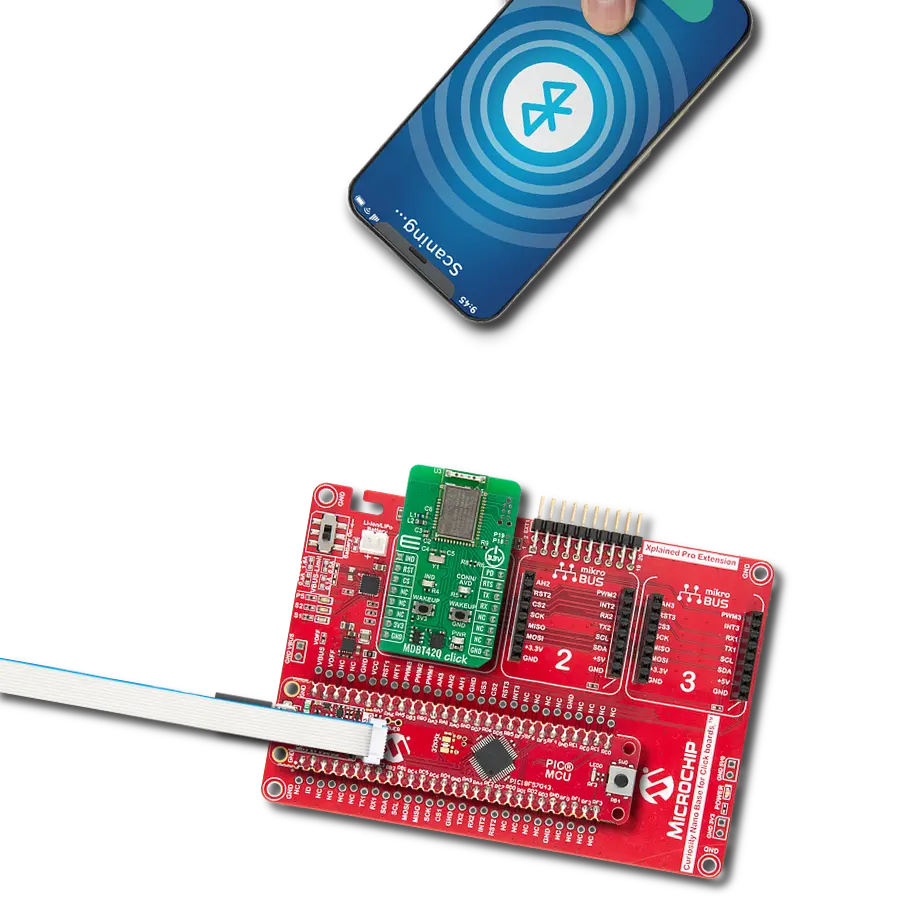
Our Bluetooth 5.1 LE solution ensures a robust link between devices while optimizing energy usage, delivering a superior wireless experience
A
A
Hardware Overview
How does it work?
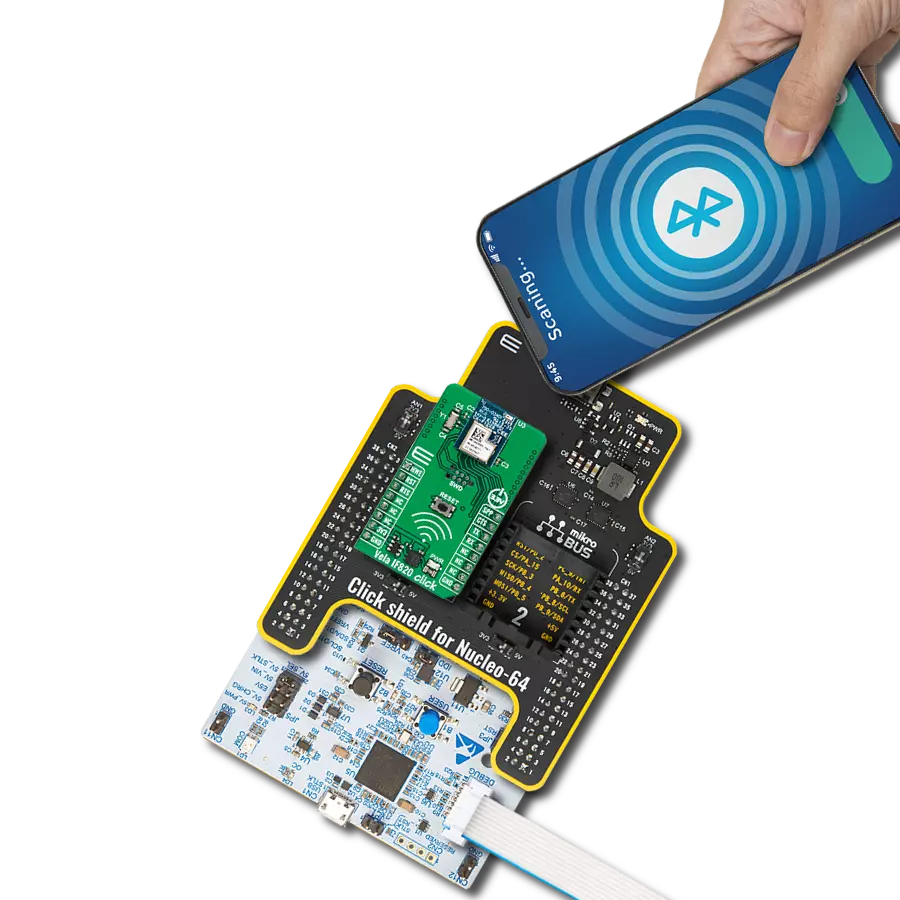
ANNA-B412 Click is based on the ANNA-B412, a standalone Bluetooth 5.1 low-energy module from u-blox. Under the metal hood, all the hard work is done by the nRF52833 from Nordic Semiconductor, which includes an integrated 2.4GHz transceiver with +8dBm output power and powerful Arm Cortex-M4 with FPU processor. In addition, it is equipped with 512KB of flash memory and 128KB of RAM. For a Bluetooth connection in a 2.4GHz frequency band, ANNA-B412 Click is equipped with a printed PCB antenna with support for 40 channels. The Bluetooth antenna has +9dBm of maximum radiated output power. For NFC, ANNA-B412 Click is equipped with a u.Fl connector, and can operate as a 13.56MHz NFC tag at a bit rate of 106Kbps. One of the main features of this module is the Angle of Arrival (AoA) and Angle of Departure (AoD) with the support of
a Bluetooth 5.1 Direction Finding service. These features can be used for indoor positioning, wayfinding, asset tracking, and more. The module supports Active, Standby, and Sleep modes to optimize power consumption. Two buttons (T1 and T2) can control the system. By combining these buttons while operating or during Power-Up, you can restore settings to their default values, open a Bluetooth LE connection to a peripheral device, enter bootloader mode, or exit the bootloader mode and restore all settings to their factory default values. The onboard RGB LED notifies the system status signals, which can be idle in Data mode/Extended data mode, idle in Command mode, connecting, and connected. In addition, ANNA-B412 Click is equipped with ten u-connectXpress IO pins, separated into two headers, which can be used for user configurable
purposes. ANNA B412 Click uses a 4-Wire UART interface to communicate with the host MCU with a commonly used UART RX/TX and UART RTS/ CTS as UART control flow pins. In addition, the UART DTR data terminal ready and the UART DSR data set ready are also available. The default baud rate is 115200bps. The RST pin can be used to reset the module with active LOW. Besides the library we provide, you can use a set of AT commands to control the ANNA B-412 module over the UART interface. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for ANNA-B412 Click driver.
Key functions:
annab412_set_cmd_conn_mode- ANNA-B412 set connectability mode function.annab412_set_cmd_discover_mode- ANNA-B412 set discoverability mode function.annab412_set_cmd_device_name- ANNA-B412 set device name function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief ANNA-B412 Click Example.
*
* # Description
* This example demonstrates the use of ANNA-B412 Click board by processing
* the incoming data and displaying them on the USB UART.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Reads and processes all incoming data and displays them on the USB UART.
*
* ## Additional Function
* - static void annab412_clear_app_buf ( void )
* - static err_t annab412_process ( annab412_t *ctx )
* - static err_t annab412_display_rsp ( char *rsp_end )
*
* @note
* We have used the BLE Scanner smartphone application for the test.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "annab412.h"
#define PROCESS_BUFFER_SIZE 200
#define DEVICE_NAME "ANNA-B412 Click"
#define RSP_TIMEOUT 20000
#define RSP_OK "OK"
static annab412_t annab412;
static log_t logger;
static uint8_t app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
/**
* @brief ANNA-B412 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @note None.
*/
static void annab412_clear_app_buf ( void );
/**
* @brief ANNA-B412 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #annab412_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t annab412_process ( annab412_t *ctx );
/**
* @brief ANNA-B412 display response function.
* @details This function reads data from device until sends @a rsp_end or ERROR message or until
* it exceeds the timeout value.
* @param[in] rsp_end : Response/Event ending string
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t annab412_display_rsp ( char *rsp_end );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
annab412_cfg_t annab412_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
annab412_cfg_setup( &annab412_cfg );
ANNAB412_MAP_MIKROBUS( annab412_cfg, MIKROBUS_1 );
if ( UART_ERROR == annab412_init( &annab412, &annab412_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( ANNAB412_ERROR == annab412_default_cfg ( &annab412 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
Delay_ms ( 1000 );
annab412_set_cmd_echo_on( &annab412 );
annab412_display_rsp( RSP_OK );
Delay_ms ( 100 );
annab412_set_cmd_device_name( &annab412, DEVICE_NAME );
annab412_display_rsp( RSP_OK );
Delay_ms ( 100 );
annab412_set_cmd_discover_mode( &annab412, ANNAB412_DISCOVERABLE_MODE_ON );
annab412_display_rsp( RSP_OK );
Delay_ms ( 100 );
annab412_set_cmd_enter_mode( &annab412, ANNAB412_ENTER_MODE_DATA );
annab412_display_rsp( RSP_OK );
Delay_ms ( 100 );
annab412_set_dsr_pin( &annab412, ANNAB412_PIN_STATE_LOW );
Delay_ms ( 100 );
}
void application_task ( void )
{
annab412_process( &annab412 );
if ( app_buf_len > 0 )
{
log_printf( &logger, "%s", app_buf );
annab412_clear_app_buf( );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void annab412_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static err_t annab412_process ( annab412_t *ctx )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t rx_size = 0;
rx_size = annab412_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = app_buf_len;
if ( ( ( app_buf_len + rx_size ) > PROCESS_BUFFER_SIZE ) && ( app_buf_len > 0 ) )
{
buf_cnt = PROCESS_BUFFER_SIZE - ( ( app_buf_len + rx_size ) - PROCESS_BUFFER_SIZE );
memmove ( app_buf, &app_buf[ PROCESS_BUFFER_SIZE - buf_cnt ], buf_cnt );
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ buf_cnt++ ] = rx_buf[ rx_cnt ];
if ( app_buf_len < PROCESS_BUFFER_SIZE )
{
app_buf_len++;
}
}
}
return ANNAB412_OK;
}
return ANNAB412_ERROR;
}
static err_t annab412_display_rsp ( char *rsp_end )
{
uint32_t timeout = RSP_TIMEOUT;
annab412_clear_app_buf( );
while ( timeout-- )
{
annab412_process( &annab412 );
if ( app_buf_len > 0 )
{
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
if ( strstr( app_buf, rsp_end ) )
{
annab412_clear_app_buf( );
Delay_ms ( 100 );
annab412_process( &annab412 );
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
annab412_clear_app_buf( );
log_printf( &logger, "--------------------------------\r\n" );
return ANNAB412_OK;
}
}
Delay_ms ( 1 );
}
return ANNAB412_ERROR;
}
// ------------------------------------------------------------------------ END