Witness the future of connectivity with ESP8684-MINI-1 and PIC32MZ2048EFM100
A game-changer in wireless solutions, designed to redefine the way you connect

Published Nov 13, 2023
Click board™
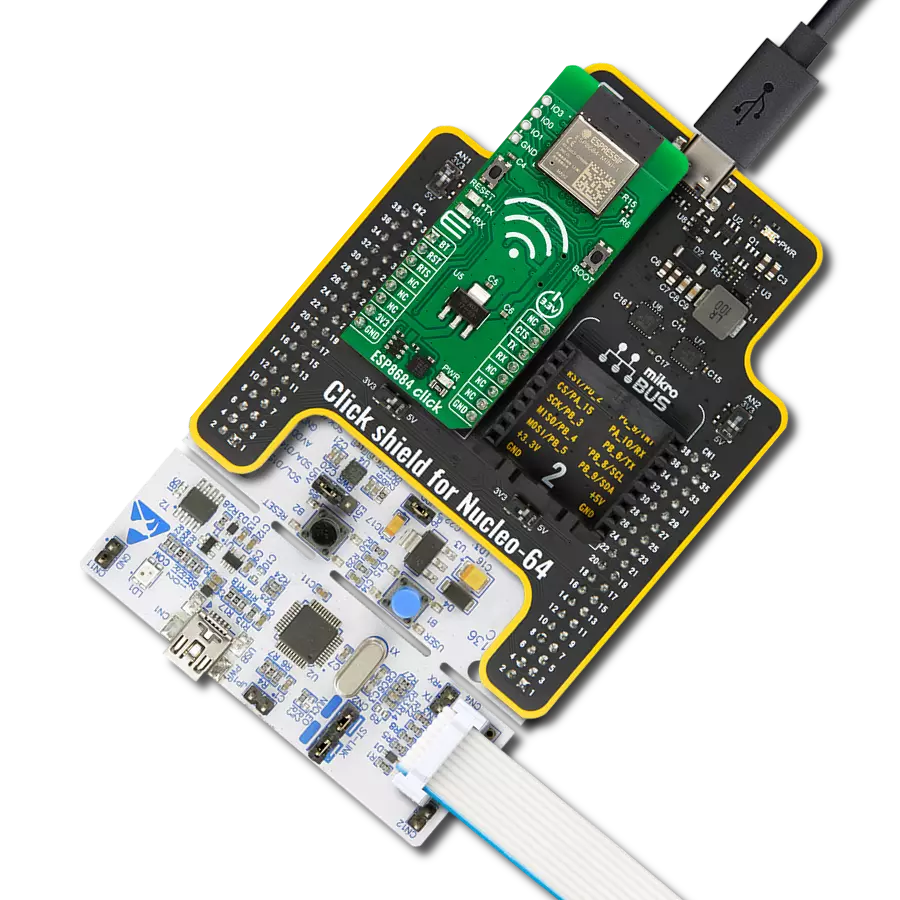
ESP8684 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Our wireless combo solution harmonizes the strengths of WiFi and BLE, creating a symphony of connectivity for a smarter, more efficient world.
A
A
Hardware Overview
How does it work?
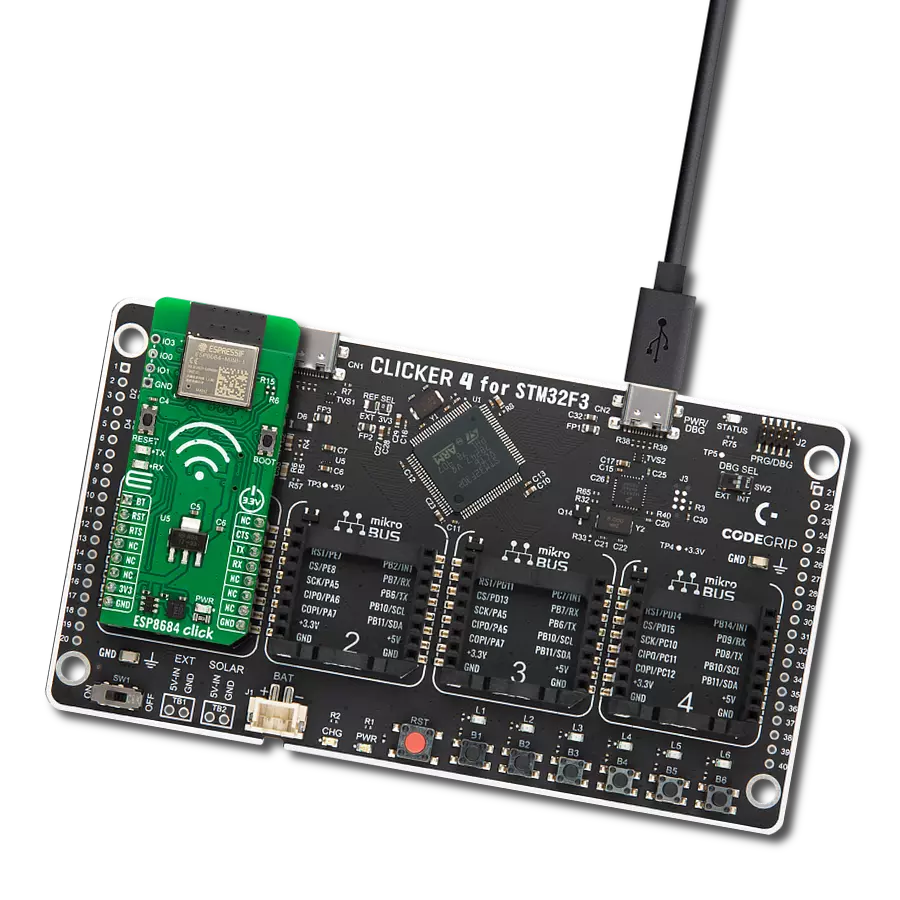
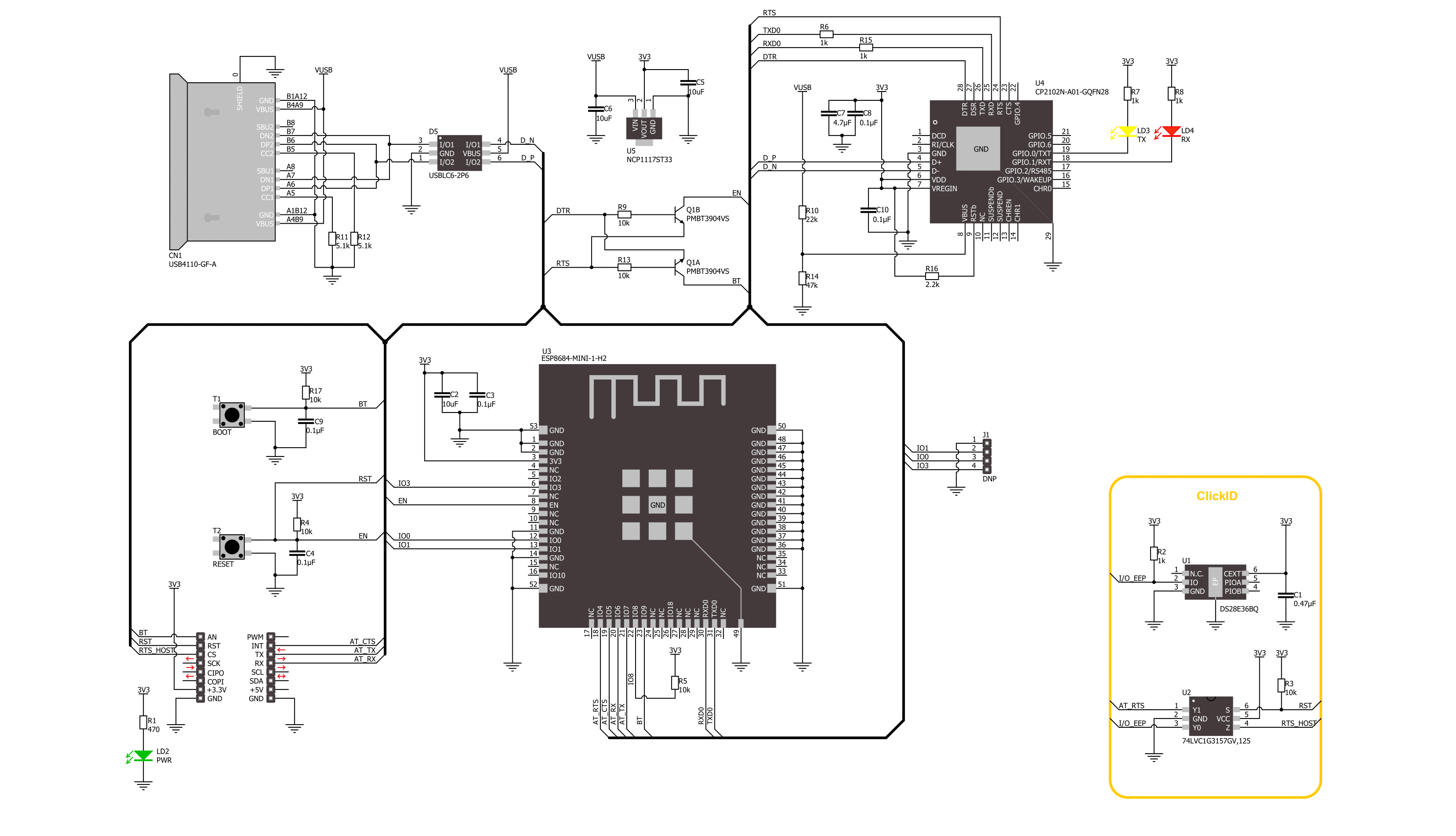
ESP8684 Click is based on the ESP8684-MINI-1, a highly integrated WiFi, and a Bluetooth 5 module from Espressif Systems. It is based on the ESP8684H2 embedded 32-bit RISC-V single-core processor operating at up to 120MHz frequency. The processor also has an on-chip 576KB of ROM and 272KB of SRAM memory, supporting flash in-circuit programming (ICP). It also features an internal co-existence mechanism between WiFi and Bluetooth to share the same printed PCB antenna. The downside is that you can’t use both WiFi and Bluetooth at the same time. ESP8684 Click is an IEEE802.11b/g/n-compliant and supports 20MHz bandwidth in the 2.4GHz band. In 1T1R mode, it can achieve data rates of up to 72.2Mbps. In addition, the module supports WiFi Multimedia (WMM), fragmentation and defragmentation, transmit opportunity (TXOP), automatic beacon monitoring hardware (hardware TSF), and more. As for Bluetooth, the module can achieve
speeds of 125kbps, 500kbps, 1Mbps, and 2Mbps. The security features secure boot, flash encryption, 1024-bit OTP up to 256 bits for use, cryptographic hardware acceleration, and more. This Click board™ is equipped with a USB type C connector and circuits that allow you to establish direct communication between the ESP8684 module and a PC. This communication can be used for testing purposes or for upgrading the software. For uploading software to the ESP8684 module, there is an auto-reset circuit and the CP2102N, a USB-to-UART bridge from Silicon Labs. Two LEDs, RX and TX, are there to visually confirm the data exchange over this bridge. In addition, two buttons, RESET and BOOT, allow you to enter the ESP8684’s boot mode. Finally, a header contains 3 GPIOs and a GND for user configuration and can be used for an analog interface. ESP8684 Click uses a standard 2-Wire UART interface to communicate with the host MCU with commonly
used UART RTS and CTS control flow pins. Besides the available software and libraries we provide, you can use a set of AT commands to program the ESP8684 module. In addition to the UART bridge and two onboard buttons, you can enter the ESP8684’s boot mode via RST and BT pins of the mikroBUS™ socket. Thanks to the onboard NCP1117 LDO, which converts USB voltage into the 3.3V necessary for operation, this board can be standalone independent of the mikroBUS™ socket. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
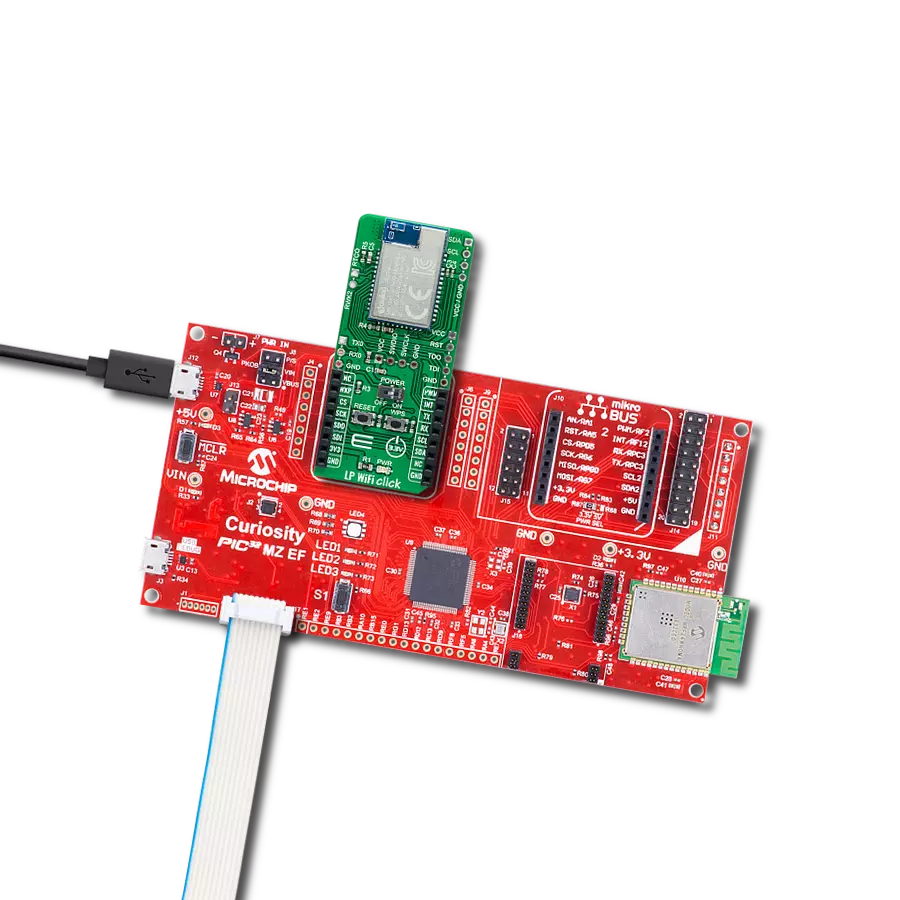
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for ESP8684 Click driver.
Key functions:
esp8684_send_cmd- ESP8684 send command with arguments function.esp8684_send_query_cmd- ESP8684 send query command function.esp8684_connect_to_network- ESP8684 connect to network function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief ESP8684 Click Example.
*
* # Description
* This example connects to the desired WiFi network and then
* connects to the TCP/UDP server, writes then reads data to and from it.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and wifi communication, then connects to the desired WiFi network
* and sends data to the TCP/UDP server.
*
* ## Application Task
* Writes and reads data from TCP/UDP server, processes all incoming data
* and displays them on the USB UART.
*
* ## Additional Function
* - void esp8684_clear_app_buf ( void )
* - void esp8684_log_app_buf ( void )
* - err_t esp8684_process ( void )
* - err_t esp8684_rsp_check ( uint8_t *response )
* - void esp8684_error_check( err_t error_flag )
* - void esp8684_send_message ( uint8_t *link_id, uint8_t *message )
* - void esp8684_con_device_to_network ( void )
* - void esp8684_send_data ( void )
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "esp8684.h"
#include "string.h"
#include "conversions.h"
#define PROCESS_BUFFER_SIZE 200
#define ESP8684_SSID "MikroE Public"
#define ESP8684_PASSWORD "mikroe.guest"
#define ESP8684_DATA "MikroE ESP8684 Click"
// TCP/UDP example parameters
#define REMOTE_IP "77.46.162.162" // TCP/UDP echo server IP address
#define REMOTE_PORT "51111" // TCP/UDP echo server port
#define TCP_LINK_ID "0" // TCP link ID
#define UDP_LINK_ID "1" // UDP link ID
esp8684_t esp8684;
log_t logger;
uint8_t app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t app_buf_len = 0;
err_t app_error_flag;
/**
* @brief ESP8684 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @return Nothing.
* @note None.
*/
void esp8684_clear_app_buf ( void );
/**
* @brief ESP8684 log application buffer.
* @details This function logs application buffer and reset its length.
* @return Nothing.
* @note None.
*/
void esp8684_log_app_buf ( void );
/**
* @brief ESP8684 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
err_t esp8684_process ( void );
/**
* @brief ESP8684 response check function.
* @details This function checks the response of the sent command.
* @param[in] response : Expected response.
* @return @li @c 0 - Responded as expected.
* @li @c -1 - The response isn't the same..
* See #err_t definition for detailed explanation.
* @note None.
*/
err_t esp8684_rsp_check ( uint8_t *response );
/**
* @brief ESP8684 error check function.
* @details This function checks if error has occurred.
* @param[in] error_flag : Data to be checked.
* @return Nothing.
* @note None.
*/
void esp8684_error_check( err_t error_flag );
/**
* @brief ESP8684 send message function.
* @details This function is used to send messages to the host.
* @param[in] link_id : Host link id.
* @param[in] message : Message to be sent.
* @return Nothing.
* @note None.
*/
void esp8684_send_message ( uint8_t *link_id, uint8_t *message );
/**
* @brief ESP8684 connect device to the network.
* @details This function is used to connect device to network.
* @return Nothing.
* @note None.
*/
void esp8684_con_device_to_network ( void );
/**
* @brief ESP8684 send message to the host.
* @details This function is used to send messages to the host.
* @return Nothing.
* @note None.
*/
void esp8684_send_data ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
esp8684_cfg_t esp8684_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
esp8684_cfg_setup( &esp8684_cfg );
ESP8684_MAP_MIKROBUS( esp8684_cfg, MIKROBUS_1 );
if ( UART_ERROR == esp8684_init( &esp8684, &esp8684_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
esp8684_default_cfg( &esp8684 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
esp8684_process( );
esp8684_clear_app_buf( );
esp8684_send_cmd( &esp8684, ESP8684_CMD_AT, NULL );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_cmd( &esp8684, ESP8684_CMD_RST, NULL );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_READY );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_process( );
esp8684_clear_app_buf();
esp8684_send_cmd( &esp8684, ESP8684_CMD_GMR, NULL );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
// Communication initialization
esp8684_con_device_to_network ( );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
log_printf( &logger, "Sending and reading data from the TCP/UDP server \r\n" );
esp8684_send_data( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
void esp8684_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
void esp8684_log_app_buf ( void )
{
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
esp8684_clear_app_buf( );
}
err_t esp8684_process ( void )
{
err_t return_flag = ESP8684_ERROR;
int32_t rx_size;
uint8_t rx_buff[ ESP8684_RX_DRV_BUFFER_SIZE ] = { 0 };
rx_size = esp8684_generic_read( &esp8684, rx_buff, ESP8684_RX_DRV_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = 0;
return_flag = ESP8684_OK;
if ( app_buf_len + rx_size >= ESP8684_RX_DRV_BUFFER_SIZE )
{
esp8684_clear_app_buf( );
return_flag = ESP8684_OVERFLOW;
}
else
{
buf_cnt = app_buf_len;
app_buf_len += rx_size;
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buff[ rx_cnt ] != 0 )
{
app_buf[ ( buf_cnt + rx_cnt ) ] = rx_buff[ rx_cnt ];
}
else
{
buf_cnt--;
app_buf_len--;
}
}
}
return return_flag;
}
err_t esp8684_rsp_check ( uint8_t *response )
{
uint16_t timeout_cnt = 0;
uint16_t timeout = 50000;
err_t error_flag = esp8684_process( );
if ( ( error_flag != ESP8684_OK ) && ( error_flag != ESP8684_ERROR ) )
{
return error_flag;
}
while ( ( strstr( app_buf, response ) == 0 ) && ( strstr( app_buf, ESP8684_RSP_ERROR ) == 0 ) )
{
error_flag = esp8684_process( );
if ( ( error_flag != ESP8684_OK ) && ( error_flag != ESP8684_ERROR ) )
{
return error_flag;
}
timeout_cnt++;
if ( timeout_cnt > timeout )
{
esp8684_clear_app_buf( );
return ESP8684_TIMEOUT;
}
Delay_ms ( 1 );
}
esp8684_log_app_buf();
return ESP8684_OK;
}
void esp8684_error_check( err_t error_flag )
{
if ( ( ESP8684_OK != error_flag ) && ( error_flag != ESP8684_ERROR ) )
{
switch ( error_flag )
{
case ( ESP8684_OVERFLOW ):
log_error( &logger, " Overflow!" );
break;
case ( ESP8684_TIMEOUT ):
log_error( &logger, " Timeout!" );
break;
default:
break;
}
}
log_printf( &logger, "\r\n-----------------------------------\r\n" );
}
void esp8684_send_message ( uint8_t *link_id, uint8_t *message )
{
uint8_t cmd_buf[ 100 ] = { 0 };
uint8_t message_len_buf[ 5 ] = { 0 };
uint16_t message_len = strlen( message );
uint16_to_str( message_len, message_len_buf );
l_trim( message_len_buf );
r_trim( message_len_buf );
strcpy( cmd_buf, link_id );
strcat( cmd_buf, "," );
strcat( cmd_buf, message_len_buf );
esp8684_send_cmd( &esp8684, ESP8684_CMD_CIPSEND, cmd_buf );
if ( ESP8684_OK == esp8684_rsp_check( ESP8684_READY_FOR_SEND ) )
{
esp8684_generic_write( &esp8684, message, strlen(message) );
esp8684_generic_write( &esp8684, "\032", 1 );
}
}
void esp8684_con_device_to_network ( void )
{
esp8684_send_cmd( &esp8684, ESP8684_CMD_CWMODE, "1" );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_connect_to_network( &esp8684, ESP8684_SSID, ESP8684_PASSWORD );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_cmd( &esp8684, ESP8684_CMD_CIPMUX, "1" );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_cmd( &esp8684, ESP8684_CMD_CIPRECVMODE, "0" );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_query_cmd( &esp8684, ESP8684_CMD_CIPSTATE );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
}
void esp8684_send_data ( void )
{
esp8684_connect_for_trans( &esp8684, "TCP", TCP_LINK_ID, REMOTE_IP, REMOTE_PORT );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_connect_for_trans( &esp8684, "UDP", UDP_LINK_ID, REMOTE_IP, REMOTE_PORT );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_message( TCP_LINK_ID, ESP8684_DATA );
Delay_ms ( 500 );
log_printf( &logger, "Read data TCP: \r\n" );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_RECEIVE );
esp8684_error_check( app_error_flag );
Delay_ms ( 1000 );
esp8684_send_message( UDP_LINK_ID, ESP8684_DATA );
Delay_ms ( 500 );
log_printf( &logger, "Read data UDP: \r\n" );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_RECEIVE );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_cmd( &esp8684, ESP8684_CMD_CIPCLOSE, TCP_LINK_ID );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
esp8684_send_cmd( &esp8684, ESP8684_CMD_CIPCLOSE, UDP_LINK_ID );
app_error_flag = esp8684_rsp_check( ESP8684_RSP_OK );
esp8684_error_check( app_error_flag );
Delay_ms ( 500 );
}
// ------------------------------------------------------------------------ END