Elevate your project's data communication capabilities with CP2102N and PIC18F57Q43
Connecting worlds: USB to UART bridge for easy data transfer

Published Feb 13, 2024
Click board™
USB UART 3 Click
Dev. board
Curiosity Nano with PIC18F57Q43
Compiler
NECTO Studio
MCU
PIC18F57Q43
Our USB to UART communication interface bridge solution streamlines data exchange between USB and UART devices, ensuring fast and error-free connectivity.
A
A
Hardware Overview
How does it work?
USB UART 3 Click is based on the CP2102N, a highly integrated USB to UART interface, from Silicon Labs. This IC adds USB to UART communication for embedded applications, registering itself as the virtual COM port, once the required drivers are installed. The device itself features the entire stack needed for the communication, so no firmware is required to handle the data transfer process between the UART and the USB. It offers a range of data rates from 300bps up to 3Mbps, hardware flow control support, 512 bytes long FIFO buffer, USB suspend and wakeup, 960 bytes of non-volatile configuration memory (EEPROM), and more. The device comes with the pre-programmed factory settings, so it works as the virtual COM port device, requiring the appropriate Virtual COM port device drivers. In this scenario, it will offer a fully RS232 compliant virtual COM port, which can be used and configured as any other COM port on the computer, with the USB data available at the UART RX and TX pins. The USB port of the Click board™ is ESD protected by the USBLC6-2SC6, a very low capacitance ESD protection IC, and it is compliant with the USB 2.0 standard. When using the USBXpress™ drivers, the device can be configured by using the Xpress Configurator in the Simplicity Studio, a software application, developed by Silicon Labs. This provides a graphical user interface for simplified configuration of the various parameters of this device. By configuring the communication to use the hardware handshaking, it is possible to utilize the internal FIFO buffer for improved speed and
reliability. This will require using the RTS and CTS pins. Hardware flow control uses these pins to signal nearly full status of the internal FIFO buffer. RTS pin will report that the FIFO buffer is almost full by being pulled to a HIGH logic level. On the other side, the CTS pin detects this condition, and when pulled to a HIGH logic level, the data will not be sent anymore (up to two bytes will be sent after the CTS pin is driven to a HIGH logic state). By using the hardware flow control, no receiver overrun conditions will occur at high baud rates. Therefore, it is advised to use it for high baud rate communication - 1 Mbaud or more. Software handshaking is also supported, by using the XON and XOFF characters. RTS and CTS pins are routed to the mikroBUS™ INT and CS pins, respectively. USB suspend event will be indicated on two CP2102N pins: SUSPEND and SUSPEND#. These pins will be pulled to a LOW and HIGH level respectively when the USB port suspends the IC. The SUSPEND# line is used to light up a LED indicator labeled as SUSP, while the SUSPEND pin is routed to the AN pin of the mikroBUS™, indicating the USB suspend event to the MCU. This can be used for power saving purposes, as the external circuitry can be turned off in the case of USB suspend event. The device also features a Remote Wake function. When the USB port is in suspend mode, by pulling the WAKEUP pin to a LOW logic level, the CP2102N will begin the USB wake-up sequence. Please note that the operating system has to allow this, by setting the appropriate power management options (in Windows OS navigate to Properties > Power Management >
Allow this device to wake up the computer). The WAKEUP pin is routed to the PWM pin of the mikroBUS™. The WAKEUP pin is multiplexed with the GPIO3 pin function and it can be reconfigured if the WAKEUP function is not required. A hardware reset pin is also available. This pin is routed to the mikroBUS™ RST pin, and driving it to a LOW logic level will reinitialize the device. Note that the SUSP LED will be lit after POR or any other type of reset, during the USB Enumeration sequence. UART RX and TX pins are routed to the appropriate mikroBUS™ UART pins and are used to send (receive) UART type of communication from (to) the host MCU. The UART data is exchanged by these pins with the internal FIFO buffer. This allows the USB transceiver to send (receive) data packets to (from) the computer and exchange them with the UART section. The data traffic is indicated by two onboard LED indicators labeled as TX and RX. These LEDs are multiplexed with the GPIO0 and GPIO1 pin functions, so changing them in the configurator is not advised. Silicon Labs offer an extensive documentation, explaining operation and functionality of their software application, so it can be referenced if more information is required. The link to the virtual COM port drivers is provided below, in the downloads section. The drivers will be installed according to the configurable PID and VID values of the CP2102N device. By default, the device is set to work as the virtual COM port (VCP) USB to UART bridge. For building customized drivers, please consult the Silicon Labs documentation.

Features overview
Development board
PIC18F57Q43 Curiosity Nano evaluation kit is a cutting-edge hardware platform designed to evaluate microcontrollers within the PIC18-Q43 family. Central to its design is the inclusion of the powerful PIC18F57Q43 microcontroller (MCU), offering advanced functionalities and robust performance. Key features of this evaluation kit include a yellow user LED and a responsive
mechanical user switch, providing seamless interaction and testing. The provision for a 32.768kHz crystal footprint ensures precision timing capabilities. With an onboard debugger boasting a green power and status LED, programming and debugging become intuitive and efficient. Further enhancing its utility is the Virtual serial port (CDC) and a debug GPIO channel (DGI
GPIO), offering extensive connectivity options. Powered via USB, this kit boasts an adjustable target voltage feature facilitated by the MIC5353 LDO regulator, ensuring stable operation with an output voltage ranging from 1.8V to 5.1V, with a maximum output current of 500mA, subject to ambient temperature and voltage constraints.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
48
RAM (Bytes)
8196
You complete me!
Accessories
Curiosity Nano Base for Click boards is a versatile hardware extension platform created to streamline the integration between Curiosity Nano kits and extension boards, tailored explicitly for the mikroBUS™-standardized Click boards and Xplained Pro extension boards. This innovative base board (shield) offers seamless connectivity and expansion possibilities, simplifying experimentation and development. Key features include USB power compatibility from the Curiosity Nano kit, alongside an alternative external power input option for enhanced flexibility. The onboard Li-Ion/LiPo charger and management circuit ensure smooth operation for battery-powered applications, simplifying usage and management. Moreover, the base incorporates a fixed 3.3V PSU dedicated to target and mikroBUS™ power rails, alongside a fixed 5.0V boost converter catering to 5V power rails of mikroBUS™ sockets, providing stable power delivery for various connected devices.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
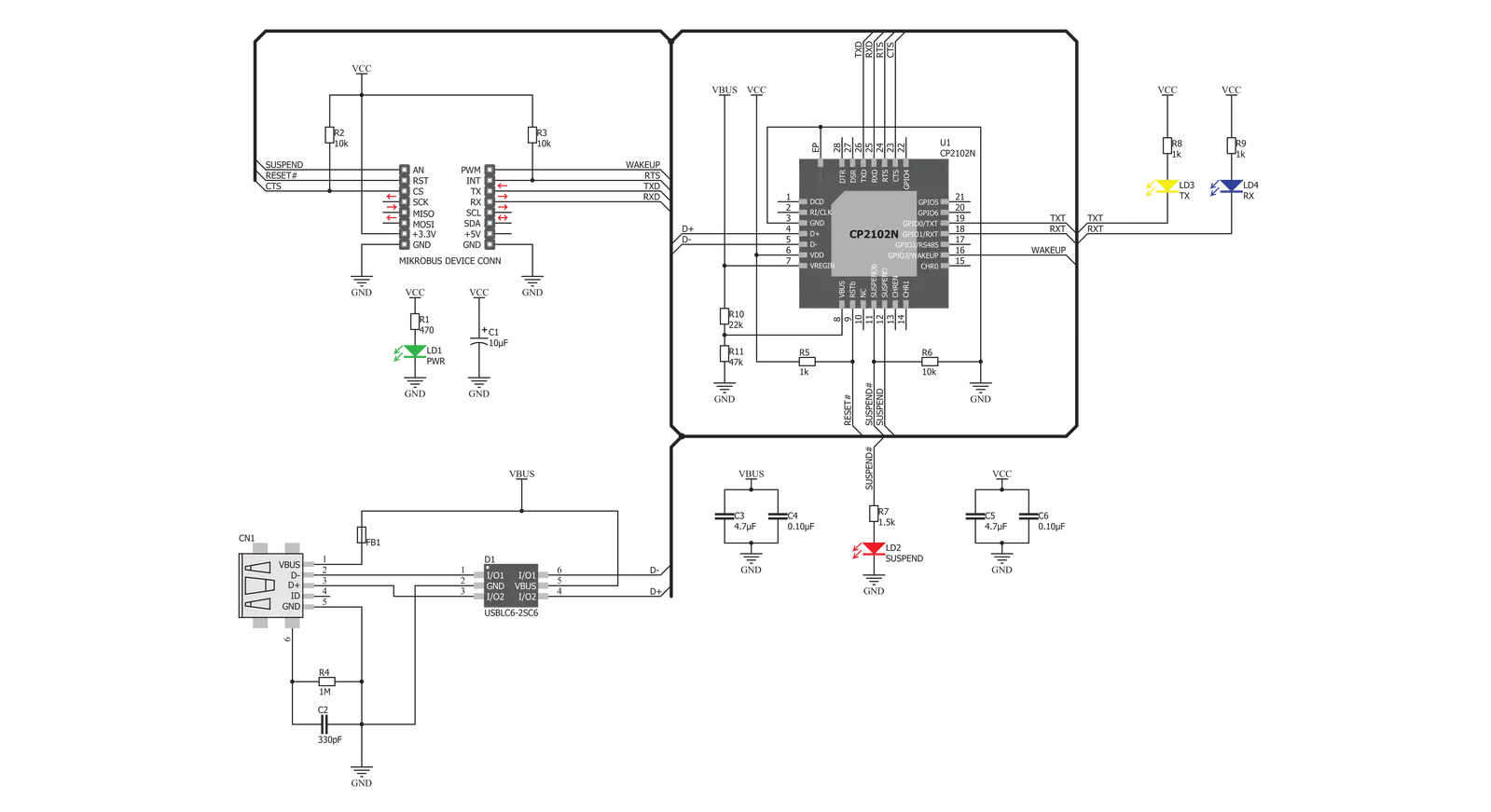
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity Nano with PIC18F57Q43 as your development board.















Software Support
Library Description
This library contains API for USB UART 3 Click driver.
Key functions:
usbuart3_reset- Function for resetusbuart3_get_susp- Set device modeusbuart3_send_command- Function for send command
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief UsbUart3 Click example
*
* # Description
* This example reads and processes data from USB UART 3 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and power module.
*
* ## Application Task
* Reads data and echos it back to device and logs it to board.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "usbuart3.h"
#include "string.h"
#define PROCESS_RX_BUFFER_SIZE 500
// ------------------------------------------------------------------ VARIABLES
static usbuart3_t usbuart3;
static log_t logger;
static int32_t rsp_size;
static char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
usbuart3_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
usbuart3_cfg_setup( &cfg );
USBUART3_MAP_MIKROBUS( cfg, MIKROBUS_1 );
usbuart3_init( &usbuart3, &cfg );
usbuart3_reset( &usbuart3 );
}
void application_task ( void )
{
rsp_size = usbuart3_generic_read( &usbuart3, uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 )
{
usbuart3_generic_write( &usbuart3, uart_rx_buffer, rsp_size );
log_printf( &logger, "%s", uart_rx_buffer );
memset( uart_rx_buffer, 0, rsp_size );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:USB