Provide nuanced haptic feedback easily with LC898302AXA and ATmega328
Feel the pulse of innovation!

Published Feb 14, 2024
Click board™
HAPTIC 2 Click
Dev. board
Arduino UNO Rev3
Compiler
NECTO Studio
MCU
ATmega328
Tailor alerts and notifications to individual preferences, ensuring that users receive important information in a way that resonates with them.
A
A
Hardware Overview
How does it work?
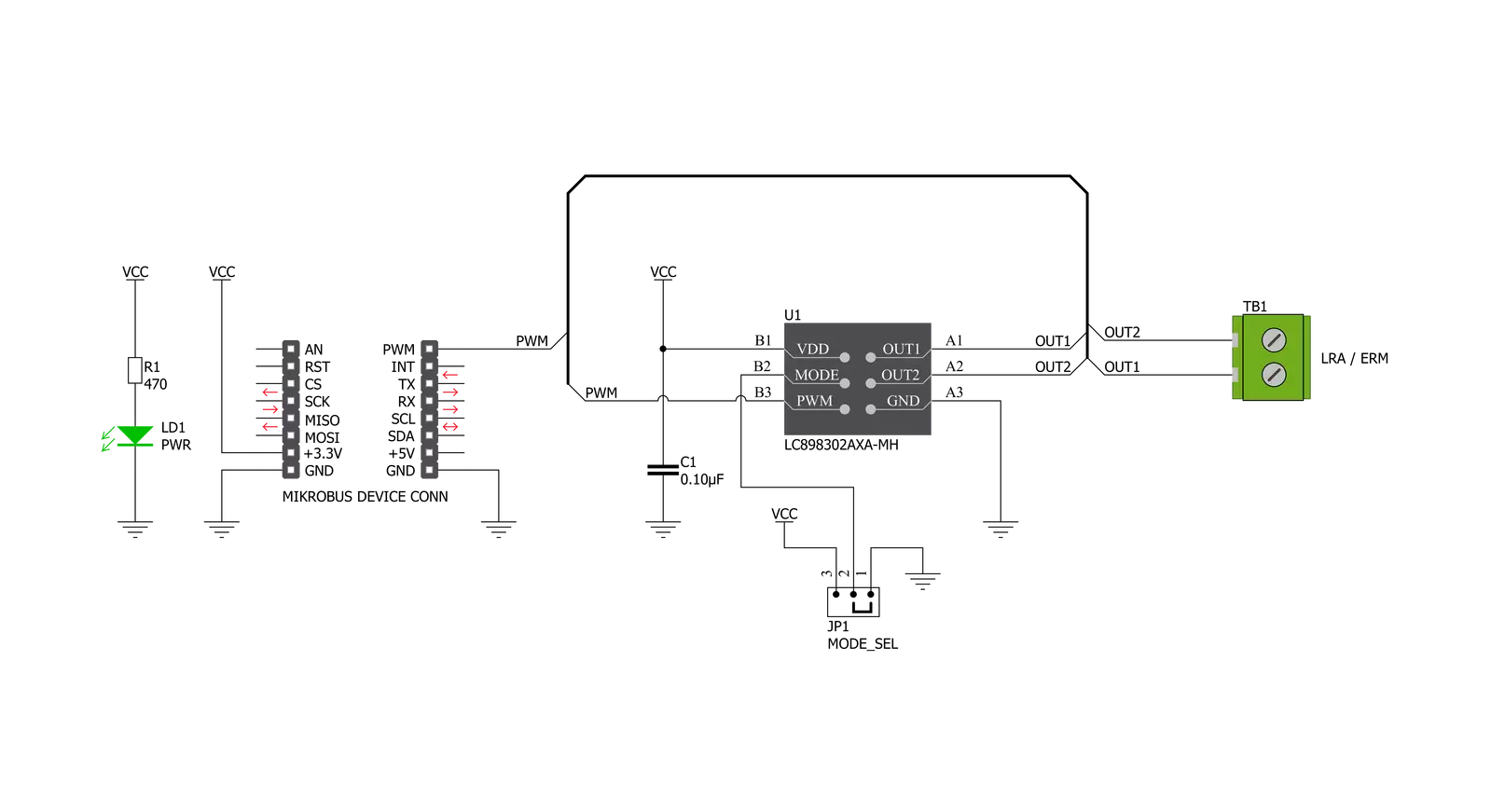
HAPTIC 2 Click is based on the LC898302AXA, a linear vibration motor driver dedicated to LRA (Linear Resonant Actuator) and ERM (Eccentric Rotating Mass) applications from ON Semiconductor. The original driving waveform enables low power consumption, and it is helpful to maintain battery lifetime. It allows crisp vibration thanks to automatic braking and over-driving features. The drive frequency automatically adjusts to the resonance frequency of the linear vibrator without the use of other external parts. As a result of this very effective drive, the vibration is as powerful as possible, using minimal energy compared to classical solutions. It also ignores the deviation of resonance frequency thanks to the
auto-tuning function. This function can increase the perceived vibration force by over 20%, making it far more efficient than conventional haptic driving solutions. They require minimal power but can maintain a high level of vibration. The LRA motors rely on a magnet attached to the case by a spring where a magnetic field from the coil causes vibration activity initiation. Compared to ERM, the LRA has better responsiveness, improving system performance. The ERM type of haptic motor causes the off-balance mass to rotate. The mass movement results in an asymmetric centripetal force displacing the motor. The ERM motor can adjust the ERM driving voltage through an adjustment resistor connected between the
OUT1 pin of the Click board™ terminal and the ERM motor pin. HAPTIC 2 Click operates only with the PWM signal from the mikroBUS™ socket that drives the LC898302AXA and offers fully configurable drive and brake functions. Also, it has a jumper setting labeled MODE SEL, which is used to choose between LRA or ERM motor to drive. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.


Features overview
Development board
Arduino UNO is a versatile microcontroller board built around the ATmega328P chip. It offers extensive connectivity options for various projects, featuring 14 digital input/output pins, six of which are PWM-capable, along with six analog inputs. Its core components include a 16MHz ceramic resonator, a USB connection, a power jack, an
ICSP header, and a reset button, providing everything necessary to power and program the board. The Uno is ready to go, whether connected to a computer via USB or powered by an AC-to-DC adapter or battery. As the first USB Arduino board, it serves as the benchmark for the Arduino platform, with "Uno" symbolizing its status as the
first in a series. This name choice, meaning "one" in Italian, commemorates the launch of Arduino Software (IDE) 1.0. Initially introduced alongside version 1.0 of the Arduino Software (IDE), the Uno has since become the foundational model for subsequent Arduino releases, embodying the platform's evolution.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
32
RAM (Bytes)
2048
You complete me!
Accessories
Click Shield for Arduino UNO has two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the Arduino UNO board without effort. The Arduino Uno, a microcontroller board based on the ATmega328P, provides an affordable and flexible way for users to try out new concepts and build prototypes with the ATmega328P microcontroller from various combinations of performance, power consumption, and features. The Arduino Uno has 14 digital input/output pins (of which six can be used as PWM outputs), six analog inputs, a 16 MHz ceramic resonator (CSTCE16M0V53-R0), a USB connection, a power jack, an ICSP header, and reset button. Most of the ATmega328P microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the Arduino UNO board with our Click Shield for Arduino UNO, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

Vibration ERM Motor 9K RPM 3V (VC1026B002F - old MPN C1026B002F) represents a compact-size Eccentric Rotating Mass (ERM) motor designed by Vybronics. This type of motor contains a small eccentric weight on its rotor, so while rotating, it also produces a vibration effect often used for haptic feedback on many small handheld devices. Due to its circular shape with a diameter of 10mm, the VC1026B002F is often referred to as a coin motor. The main characteristics of this vibration motor are its supply voltage, in this case, 3VDC, maximum rated current of 85mA, and the rated speed of 9000RPM, which produces the highest G force/vibration energy of 0.80GRMS. It can also be used with self-adhesive tape to mount it on your PCB or the inner wall of your product's housing.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Arduino UNO Rev3 as your development board.















Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for HAPTIC 2 Click driver.
Key functions:
haptic2_set_duty_cycle- Sets PWM duty cyclehaptic2_pwm_stop- Stop PWM modulehaptic2_pwm_start- Start PWM module.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Haptic2 Click example
*
* # Description
* This app shows some of the functions that Haptic 2 Click has.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enables - PWM,
* PWM signal is set to 8000 HZ and to give a 0% duty cycle
* and start PWM module.
*
* ## Application Task
* This is an example that demonstrates the use of the Haptic 2 Click board.
* In this example, we switched PWM signal back and forth
* from 10% duty cycle to 90% duty cycle every 500 milliseconds.
* Results are being sent to the Usart Terminal where you can track their changes.
*
* @author Nikola Peric
*
*/
#include "board.h"
#include "log.h"
#include "haptic2.h"
static haptic2_t haptic2;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
haptic2_cfg_t haptic2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_printf( &logger, "\r\n" );
log_info( &logger, " Application Init " );
// Click initialization.
haptic2_cfg_setup( &haptic2_cfg );
HAPTIC2_MAP_MIKROBUS( haptic2_cfg, MIKROBUS_1 );
err_t init_flag = haptic2_init( &haptic2, &haptic2_cfg );
if ( init_flag == PWM_ERROR )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
haptic2_default_cfg ( &haptic2 );
haptic2_set_duty_cycle ( &haptic2, 0.0 );
haptic2_pwm_start( &haptic2 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float duty = duty_cnt / 10.0;
haptic2_set_duty_cycle ( &haptic2, duty );
log_printf( &logger, "Duty: %d%%\r\n", ( uint16_t )( duty_cnt * 10 ) );
Delay_ms ( 500 );
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
}
duty_cnt += duty_inc;
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Haptic