Make your environments smarter, safer, and more responsive with VCNL4040 and PIC24FV32KA302
Proximity detection solution: Beyond the horizon

Published Oct 14, 2023
Click board™
Proximity 9 Click
Dev. board
EasyPIC v8 for PIC24/dsPIC33
Compiler
NECTO Studio
MCU
PIC24FV32KA302
Let us unveil the invisible connections that proximity detection brings to light, enhancing your everyday experiences
A
A
Hardware Overview
How does it work?
Proximity 9 Click is based on the VCNL4040, a fully integrated proximity and ambient light sensor with I2C interface from Vishay. It is an advanced 16bit Ambient Light Sensor (ALS) which makes use of the proprietary Filtron™ technology, providing spectral response near to a human eye. The ALS sensor also helps with the flickering of fluorescent light sources, and background light cancellation, reducing the workload of the host MCU. This sensor features a 940 nm IRED on-chip, driven by a programmable current sink driver. The VCNL4040 is also thermally compensated, allowing very accurate readings within the range between -40⁰C and +85⁰C. The Proximity Sensing (PS) section of the VCNL4040 IC implements several solutions for the improved proximity detection of objects of any color. It relies on the detection of the reflected IR light from the IRED emitter. Features such as the immunity to a red glow, intelligent crosstalk phenomenon reduction,
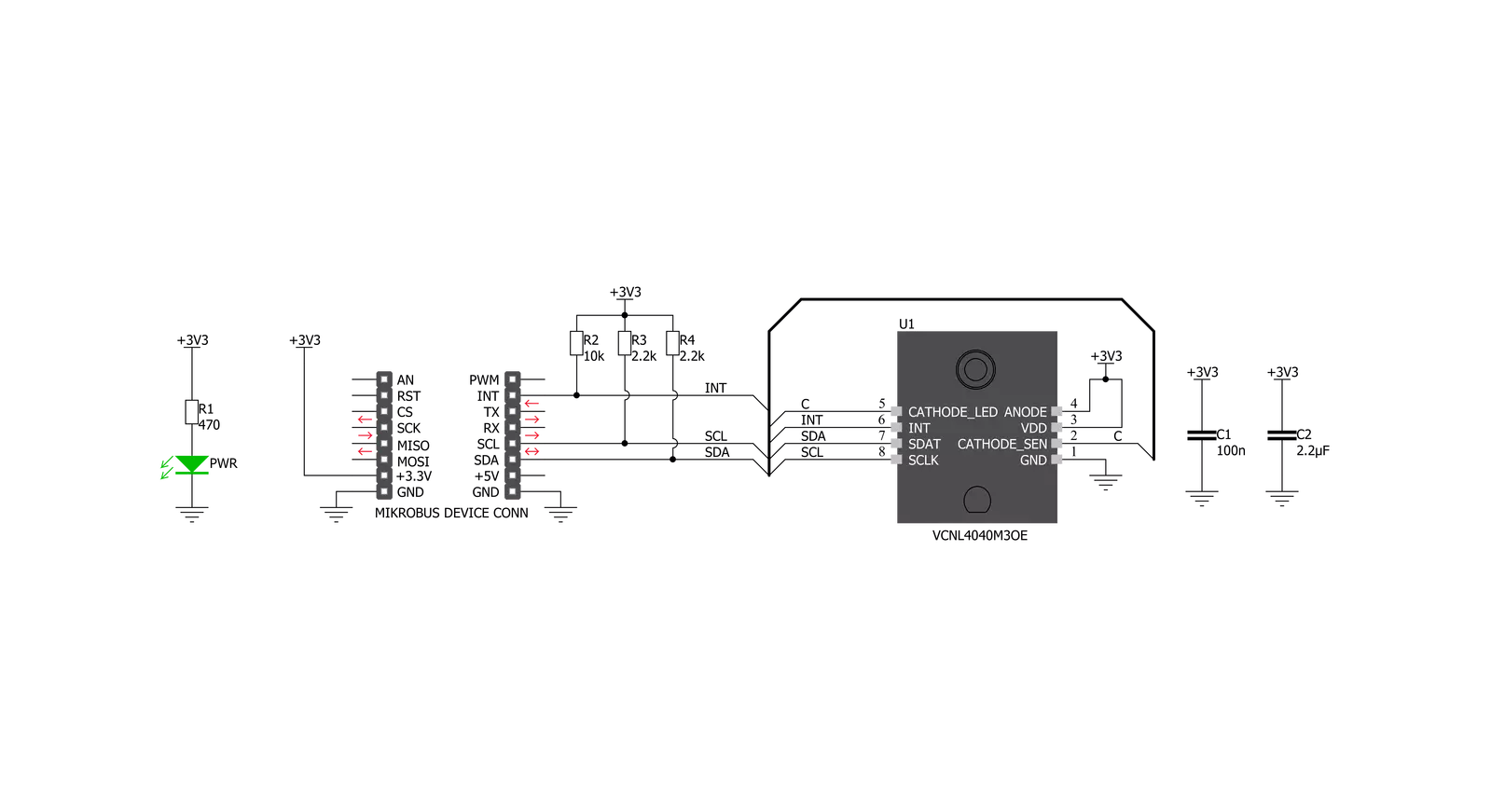
smart persistence scheme for false interrupt triggering prevention, programmable IRED current, selectable sampling resolution, and selectable integration time, help achieving a reliable and accurate proximity detection. The processed readings of the ALS and PS sensors can be fetched from the respective registers via the I2C interface. The I2C bus lines are routed to the respective mikroBUS™ I2C pins: SCL is the I2C clock and SDA is the I2C data line. Proximity 9 click offers programmable interrupt engine. The INT pin is routed to the mikroBUS™ INT pin and it is pulled up by the onboard resistor. When asserted, it is driven to a LOW logic level. The interrupt can be programmed to be triggered whenever PS threshold window is exceeded, for a programmed number of times (interrupt persistence). There are two interrupt modes: the interrupt will remain latched in the normal mode until the interrupt status flag is read by the host firmware. If set to a
logic mode, the interrupt will be asserted when the PS value rises above the high threshold level, and de-asserted when the PS value falls below the low threshold level. The logic mode is useful when an autonomous operation with some external circuit is required, while the normal mode is best suited to be used with the MCU. The INT pin is routed to the INT pin of the mikroBUS™. The Click board™ is supported by the mikroSDK library, which contains functions for simplified development. The mikroSDK functions are well-documented, but there is still a need, the datasheet of the VCNL4040 offers a listing of all the registers and their specific functions. The Click board™ is designed to work with 3.3V only. When using it with MCUs that use 5V levels for their communication, a proper level translation circuit should be used.


Features overview
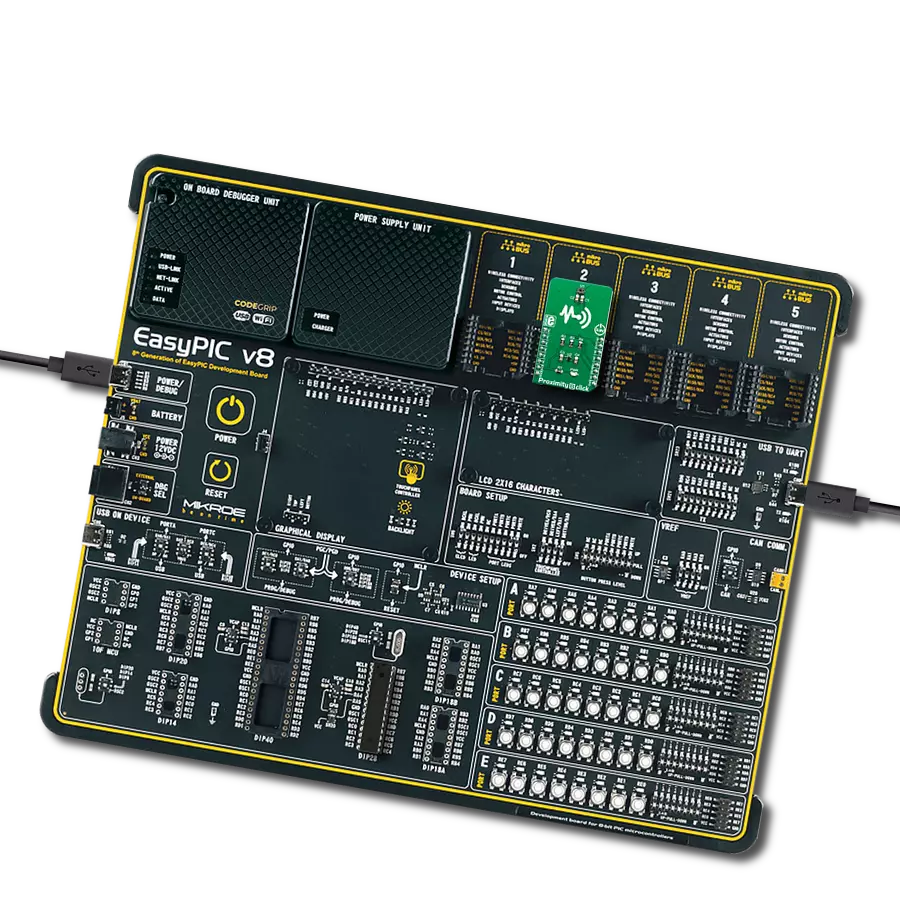
Development board
EasyPIC v8 for PIC24/dsPIC33 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of 16-bit PIC24/dsPIC33 microcontrollers from Microchip and has a broad set of unique functions, such as the first-ever embedded debugger/programmer. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, EasyPIC v8 for PIC24/dsPIC33 provides a fluid and immersive working experience, allowing access anywhere and under any circumstances. Each part of the EasyPIC
v8 for PIC24/dsPIC33 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector. Communication options such as USB HOST/DEVICE, USB-UART, CAN, and LIN are also
included, including the well-established mikroBUS™ standard, two display options (graphical and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 16-bit PIC24/dsPIC33 MCUs, from the smallest PIC24/dsPIC33 MCUs with only 14 up to 28 pins. EasyPIC v8 for PIC24/dsPIC33 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
dsPIC
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
2048
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyPIC v8 for PIC24/dsPIC33 as your development board.















Software Support
Library Description
This library contains API for Proximity 9 Click driver.
Key functions:
proximity9_check_int_pin- INT Pin Check functionproximity9_check_int_flag- INT Flag Check functionproximity9_get_als_lux- ALS Get function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Proximity9 Click example
*
* # Description
* This application is proximity sensing (PS) and ambient light sensing (ALS) device.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes I2C interface and performs a device configurations.
*
* ## Application Task
* Performs a data reading and interrupt flag checking.
* Allows data and interrupt flags messages to be showed on the uart terminal.
*
* *note:*
* The ALS sensitivity depends on the ALS integration time setting.
* The longer integration time has higher sensitivity.
* The Proximity (PS) output data can be set to 12-bit or 16-bit resolution.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "proximity9.h"
// ------------------------------------------------------------------ VARIABLES
static proximity9_t proximity9;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
proximity9_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
proximity9_cfg_setup( &cfg );
PROXIMITY9_MAP_MIKROBUS( cfg, MIKROBUS_1 );
proximity9_init( &proximity9, &cfg );
proximity9_default_cfg( &proximity9 );
log_printf( &logger, "** Proximity 9 is initialized ** \r\n" );
log_printf( &logger, "************************************ \r\n" );
Delay_ms ( 300 );
}
void application_task ( )
{
uint8_t int_check;
uint16_t prox_data;
float als_data;
uint8_t temp;
als_data = proximity9_get_als_lux( &proximity9 );
proximity9_read_register( &proximity9, PROXIMITY9_PS_DATA_REG, &prox_data );
temp = PROXIMITY9_PS_IF_CLOSE_FLAG | PROXIMITY9_PS_IF_AWAY_FLAG;
int_check = proximity9_check_int_flag( &proximity9, temp );
log_printf( &logger, "** ALS: %.2f lux \r\n", als_data );
log_printf( &logger, "** PROXIMITY: %d \r\n", prox_data );
if ( int_check == PROXIMITY9_PS_IF_CLOSE_FLAG )
{
log_printf( &logger, "** Object is close! \r\n" );
log_printf( &logger, "************************************ \r\n" );
Delay_ms ( 1000 );
}
if ( int_check == PROXIMITY9_PS_IF_AWAY_FLAG )
{
log_printf( &logger, "** Object is away!\r\n" );
log_printf( &logger, "************************************ \r\n" );
Delay_ms ( 1000 );
}
if ( int_check == PROXIMITY9_INT_CLEARED )
{
log_printf( &logger, "************************************ \r\n" );
Delay_ms ( 1000 );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Proximity