Provide intuitive and reliable input control with 2434804-1 and STM32F303VC
5-position joystick (left, right, up, down, and 'select) for various interactive purposes

Published Aug 20, 2024
Click board™
Joystick 4 Click
Dev. board
Discovery kit with STM32F303VC MCU
Compiler
NECTO Studio
MCU
STM32F303VC
Integrate multi-directional control into your project, making it ideal for compact and efficient user interface designs
A
A
Hardware Overview
How does it work?
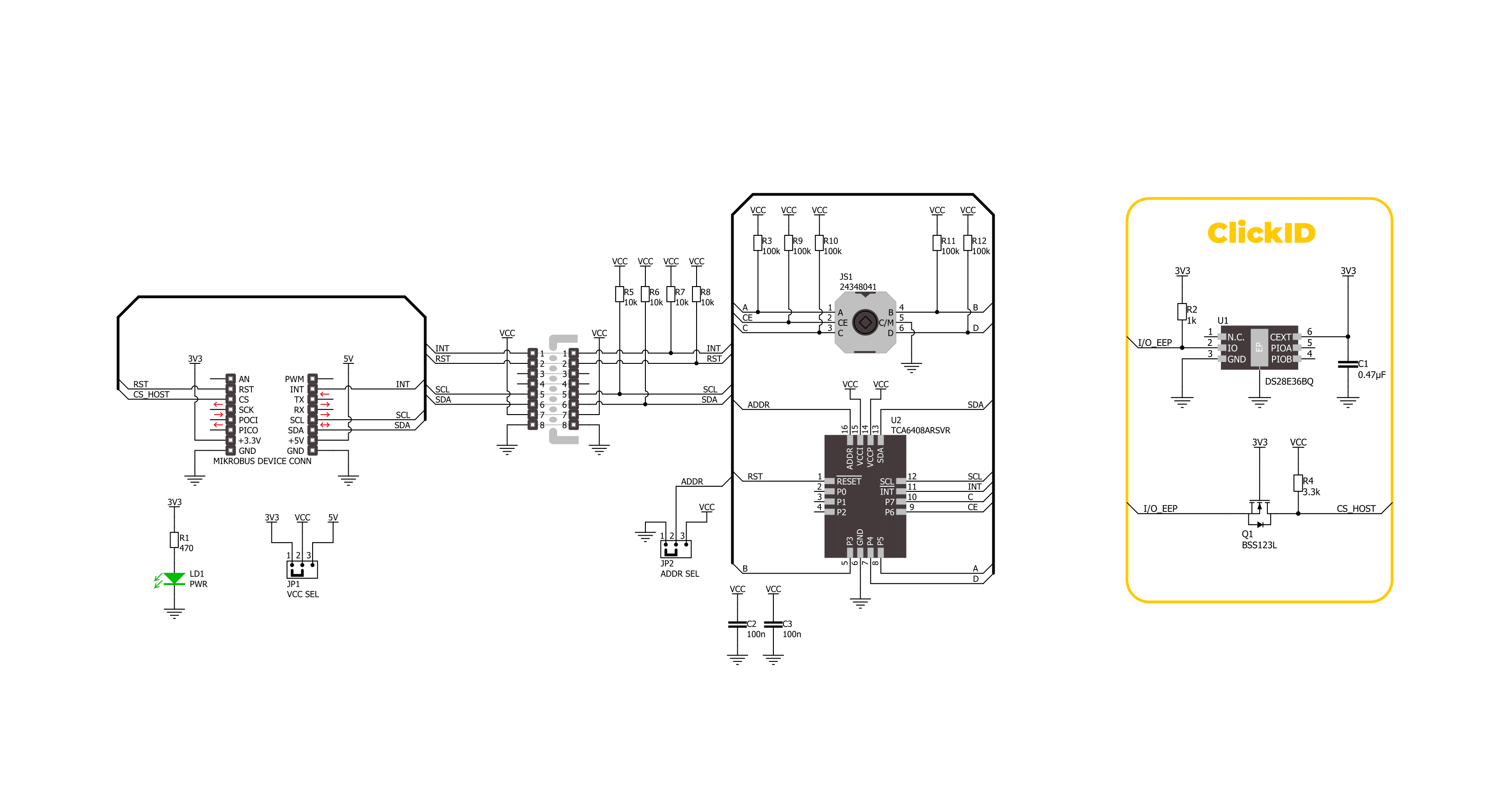
Joystick 4 Click is based on the 2434804-1, an ALCOSWITCH series 5-position tactile switch from TE Connectivity. This tactile switch features an extended top actuator for precise and reliable input detection. Built with a stainless steel contact base and silver contact plating, it ensures durability and resistance to corrosion, providing an operational lifespan of 100,000 cycles. With its low-profile design, the switch can handle a contact current rating of 50mA and can operate at a voltage of 12VDC, in general. These tactile switches are critical for providing tactile feedback due to their high reliability and are used in various applications, including portable devices, instrumentation, security systems, gaming consoles, remote controllers, and handheld devices. Joystick 4 Click leverages these attributes to deliver accurate and responsive input control, making it ideal for
interactive projects where dependable tactile feedback is essential. Whether designing a game controller or developing a user interface for a portable device, this board offers the functionality and durability necessary for the most accessible integration. This Click board™ is designed in a unique format supporting the newly introduced MIKROE feature called "Click Snap." Unlike the standardized version of Click boards, this feature allows the main sensor area to become movable by breaking the PCB, opening up many new possibilities for implementation. Thanks to the Snap feature, the switches can operate autonomously by accessing their signals directly on the pins marked 1-8. Additionally, the Snap part includes a specified and fixed screw hole position, enabling users to secure the Snap board in their desired location. Joystick 4 Click interfaces with the host MCU
through the TCA6408A port expander using the I2C interface. This port expander enables the control of the tactile switch and its associated control signals, including a dedicated signal for detecting joystick movements. When the tactile switch is activated, it provides an interrupt signal (INT) to the host MCU, ensuring immediate response to user inputs. Besides the I2C interface pins, the port expander also uses a reset (RST) pin and includes a jumper for selecting the I2C address labeled ADDR SEL. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Discovery kit with STM32F303VC MCU streamlines application development with the STM32F3 Series microcontroller, harnessing the robustness of Arm® Cortex®-M4 architecture to provide an optimal development experience. It caters to both beginners and experts, offering essential components for swift initiation. Powered by the STM32F303VCT6, it boasts features like ST-
LINK/V2 or ST-LINK/V2-B for debugging, accelerometer, gyroscope, e-compass ST MEMS, USB connectivity, LED indicators, and push-buttons. Key specifications include a 256-Kbyte Flash memory, 48-Kbyte RAM, USB FS support, and a comprehensive array of motion sensors. The board includes ten LEDs for various statuses, including power indication and USB
communication. With user-friendly connectors and flexible power-supply options, it enables easy integration with prototype boards. Equipped with an on-board debugger/programmer and support for various Integrated Development Environments (IDEs) like IAR™, Keil®, and STM32CubeIDE, it ensures smooth and efficient development cycles.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
40960
You complete me!
Accessories
STM32F3 Discovery Shield is the perfect extension for your STM32F3 Discovery Board from STMicroelectronics. This versatile shield features four mikroBUS™ host sockets, a USB-UART module, and a CAN transceiver, expanding the capabilities of your Discovery board. Acting as a docking station, the STM32F3 Discovery Shield enables you to effortlessly transform your board into various applications, whether it's an RFID lock, SMS-triggered control switch, GPS tracking device, full-blown weather station, or any other idea you have in mind. With its seamless integration and enhanced functionality, this shield empowers you to explore endless possibilities and quickly bring your projects to life.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Discovery kit with STM32F303VC MCU as your development board.















Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Joystick 4 Click driver.
Key functions:
joystick4_get_int_pin- This function returns the INT pin logic state.joystick4_get_pins- This function reads all input pins logic state.joystick4_get_position- This function returns the joystick position flag extracted from the input pins state mask.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Joystick 4 Click example
*
* # Description
* This example demonstrates the use of the Joystick 4 Click board by reading
* and displaying the joystick position.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Waits for the input change interrupt, reads the input pins mask, extracts
* the joystick position from those readings, and displays it on the USB UART.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "joystick4.h"
static joystick4_t joystick4;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
joystick4_cfg_t joystick4_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
joystick4_cfg_setup( &joystick4_cfg );
JOYSTICK4_MAP_MIKROBUS( joystick4_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == joystick4_init( &joystick4, &joystick4_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( JOYSTICK4_ERROR == joystick4_default_cfg ( &joystick4 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
if ( JOYSTICK4_PIN_STATE_HIGH == joystick4_get_int_pin ( &joystick4 ) )
{
log_printf ( &logger, " Joystick position: IDLE\r\n\n" );
}
}
void application_task ( void )
{
uint8_t pin_mask = 0;
if ( JOYSTICK4_PIN_STATE_LOW == joystick4_get_int_pin ( &joystick4 ) )
{
if ( JOYSTICK4_OK == joystick4_get_pins ( &joystick4, &pin_mask ) )
{
log_printf ( &logger, " Joystick position: " );
switch ( joystick4_get_position ( pin_mask ) )
{
case JOYSTICK4_POSITION_IDLE:
{
log_printf ( &logger, "IDLE" );
break;
}
case JOYSTICK4_POSITION_CENTER:
{
log_printf ( &logger, "CENTER" );
break;
}
case JOYSTICK4_POSITION_CENTER_UP:
{
log_printf ( &logger, "CENTER-UP" );
break;
}
case JOYSTICK4_POSITION_CENTER_RIGHT:
{
log_printf ( &logger, "CENTER-RIGHT" );
break;
}
case JOYSTICK4_POSITION_CENTER_DOWN:
{
log_printf ( &logger, "CENTER-DOWN" );
break;
}
case JOYSTICK4_POSITION_CENTER_LEFT:
{
log_printf ( &logger, "CENTER-LEFT" );
break;
}
case JOYSTICK4_POSITION_UP:
{
log_printf ( &logger, "UP" );
break;
}
case JOYSTICK4_POSITION_UPPER_RIGHT:
{
log_printf ( &logger, "UPPER-RIGHT" );
break;
}
case JOYSTICK4_POSITION_RIGHT:
{
log_printf ( &logger, "RIGHT" );
break;
}
case JOYSTICK4_POSITION_LOWER_RIGHT:
{
log_printf ( &logger, "LOWER-RIGHT" );
break;
}
case JOYSTICK4_POSITION_DOWN:
{
log_printf ( &logger, "DOWN" );
break;
}
case JOYSTICK4_POSITION_LOWER_LEFT:
{
log_printf ( &logger, "LOWER-LEFT" );
break;
}
case JOYSTICK4_POSITION_LEFT:
{
log_printf ( &logger, "LEFT" );
break;
}
case JOYSTICK4_POSITION_UPPER_LEFT:
{
log_printf ( &logger, "UPPER-LEFT" );
break;
}
default:
{
log_printf ( &logger, "UNKNOWN" );
break;
}
}
log_printf ( &logger, "\r\n\n" );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END















