Create the ultimate magnet-angle sensing solution with AS5048A and TM4C129ENCPDT
360-degree accuracy

Published Jun 23, 2023
Click board™
MAGNETO Click
Dev. board
Fusion for Tiva v8
Compiler
NECTO Studio
MCU
TM4C129ENCPDT
Experience unparalleled precision and control with our absolute position measurement solution, providing accurate and real-time tracking of magnet rotation angles for enhanced robotics, navigation, and industrial automation applications
A
A
Hardware Overview
How does it work?
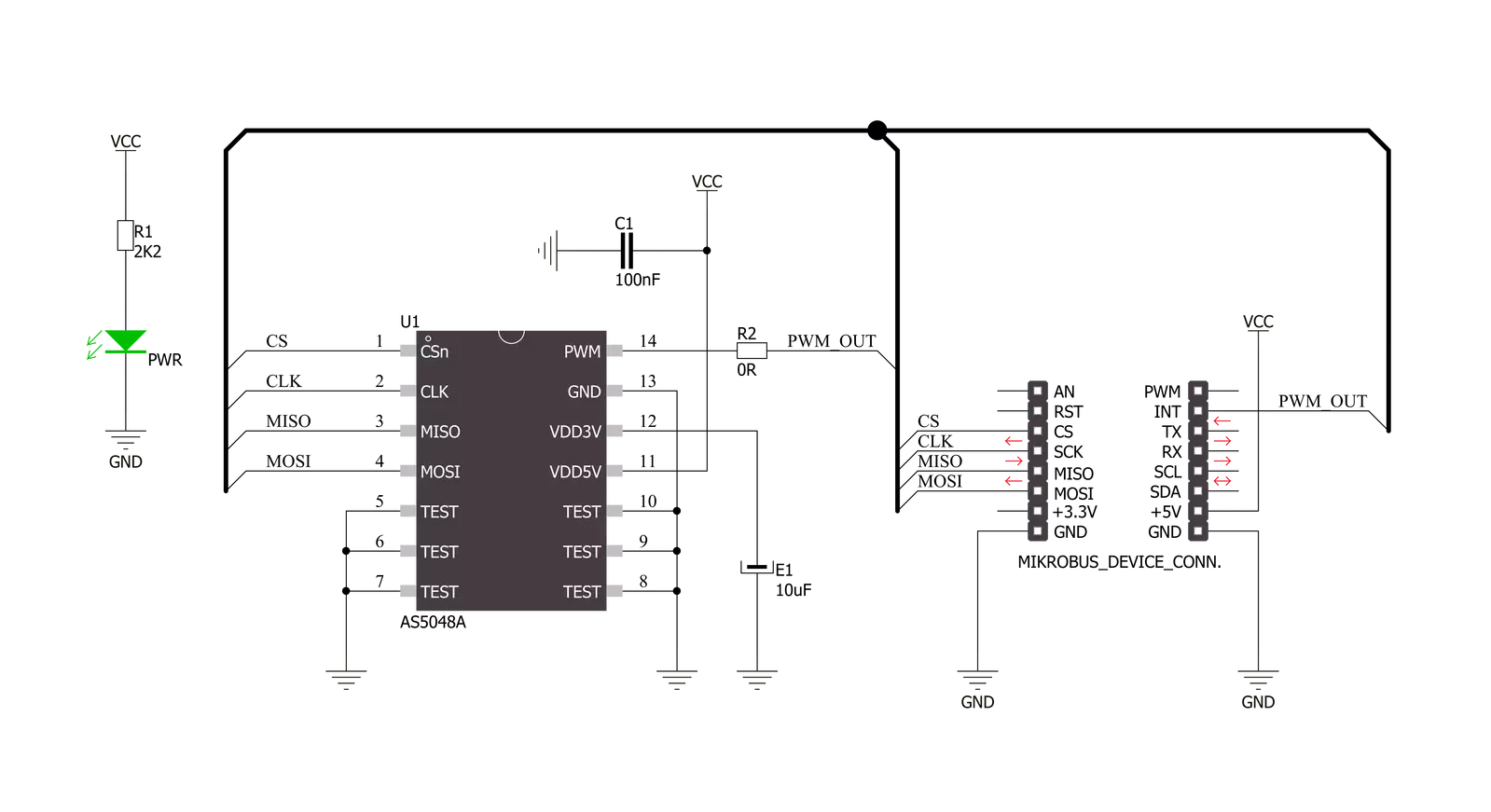
Magneto Click is based on the AS5048A, a 360° magnetic Hall sensor system from ams AG, manufactured in a CMOS process and used to measure the magnetic field components perpendicular to the surface of the chip. The integrated Hall sensors are placed around the center of the AS5048A and deliver a voltage representation of the magnetic flux. Through sigma-delta ADC and Digital Signal-Processing (DSP) algorithms, the AS5048A provides accurate high-resolution absolute angular position information of a small, diametrically magnetized (two-pole) standard magnet. The calculation is executed by CORDIC, which calculates the angle and the magnitude of the Hall array signals. DSP also provides information on the magnet
movements towards or away from the sensor surface on the z-axis. The AS5048A is pre-programmed as an SPI interface, with a PWM output signal, available on the INT pin of the mikroBUS™ socket in 12-bit format and provides a 14-bit binary code representing the magnet's angular position. It uses self-calibration methods to eliminate signal offset and sensitivity drifts. Different magnet diameters and magnetic inputs (NeFeB, SmCo, and alternative magnet materials such as hard ferrites) are possible depending on the system requirements. Also, the zero magnet position can be programmed through an SPI interface. The AS5048A uses one-time programmable (OTP) fuses for permanent programming of the user settings, with the
possible programming verification over a simple digital readout of the OTP content. It should be noted that the sensor tolerates misalignment, air gap variations, temperature variations, and as well external magnetic fields. This robustness and wide temperature range of the AS5048A makes it ideal for rotation angle sensing in harsh industrial and medical environments. This Click board™ can be operated only with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Fusion for TIVA v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different 32-bit ARM® Cortex®-M based MCUs from Texas Instruments, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over a WiFi network. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for TIVA v8 provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances at any time. Each part of the Fusion for TIVA v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for TIVA v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
Texas Instruments
Pin count
128
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for Tiva v8 as your development board.













Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for MAGNETO Click driver.
Key functions:
magneto_get_state- This function read and returns the value of the state registermagneto_calculate_angle- This function read the 16-bit data from register then calculate and convert to float angle value from 0deg to 360deg
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Magneto Click example
*
* # Description
* MAGNETO Click carries contactless magnetic angle position sensor which delivers precise angle measurements down to 0.05º in 14-bit resolution.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Application Init performs Logger and Click initialization.
*
* ## Application Task
* Magneto Click communicates with register via SPI by write and read from register and calculate float angle value.
* Results are being sent to the UART Terminal where you can track their changes.
* All data logs on USB UART for aproximetly every 2 sec.
*
* \author Mihajlo Djordjevic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "magneto.h"
float angle_value;
// ------------------------------------------------------------------ VARIABLES
static magneto_t magneto;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
magneto_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
Delay_ms ( 100 );
// Click initialization.
magneto_cfg_setup( &cfg );
MAGNETO_MAP_MIKROBUS( cfg, MIKROBUS_1 );
magneto_init( &magneto, &cfg );
log_printf( &logger, "--------------------------\r\n" );
log_printf( &logger, " ----- MAGNETO Click ---- \r\n" );
log_printf( &logger, "--------------------------\r\n" );
Delay_ms ( 1000 );
if ( magneto_get_state( &magneto ) != 1 )
{
log_printf( &logger, " -- Initialization done --\r\n" );
}
else
{
log_printf( &logger, " -------- ERROR ! --------\r\n" );
}
log_printf( &logger, "--------------------------\r\n" );
Delay_ms ( 1000 );
}
void application_task ( void )
{
angle_value = magneto_get_angle( &magneto );
log_printf( &logger, " [ANGLE] : %0.3f \r\n", angle_value );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END