Master motor speed control with Si8711CC and TM4C129LNCZAD
PWM precision meets motor control

Published Jul 25, 2023
Click board™
PWM driver Click
Dev Board
Fusion for Tiva v8
Compiler
NECTO Studio
MCU
TM4C129LNCZAD
Unlock speed control possibilities with our PWM-controlled DC motor solution
A
A
Hardware Overview
How does it work?
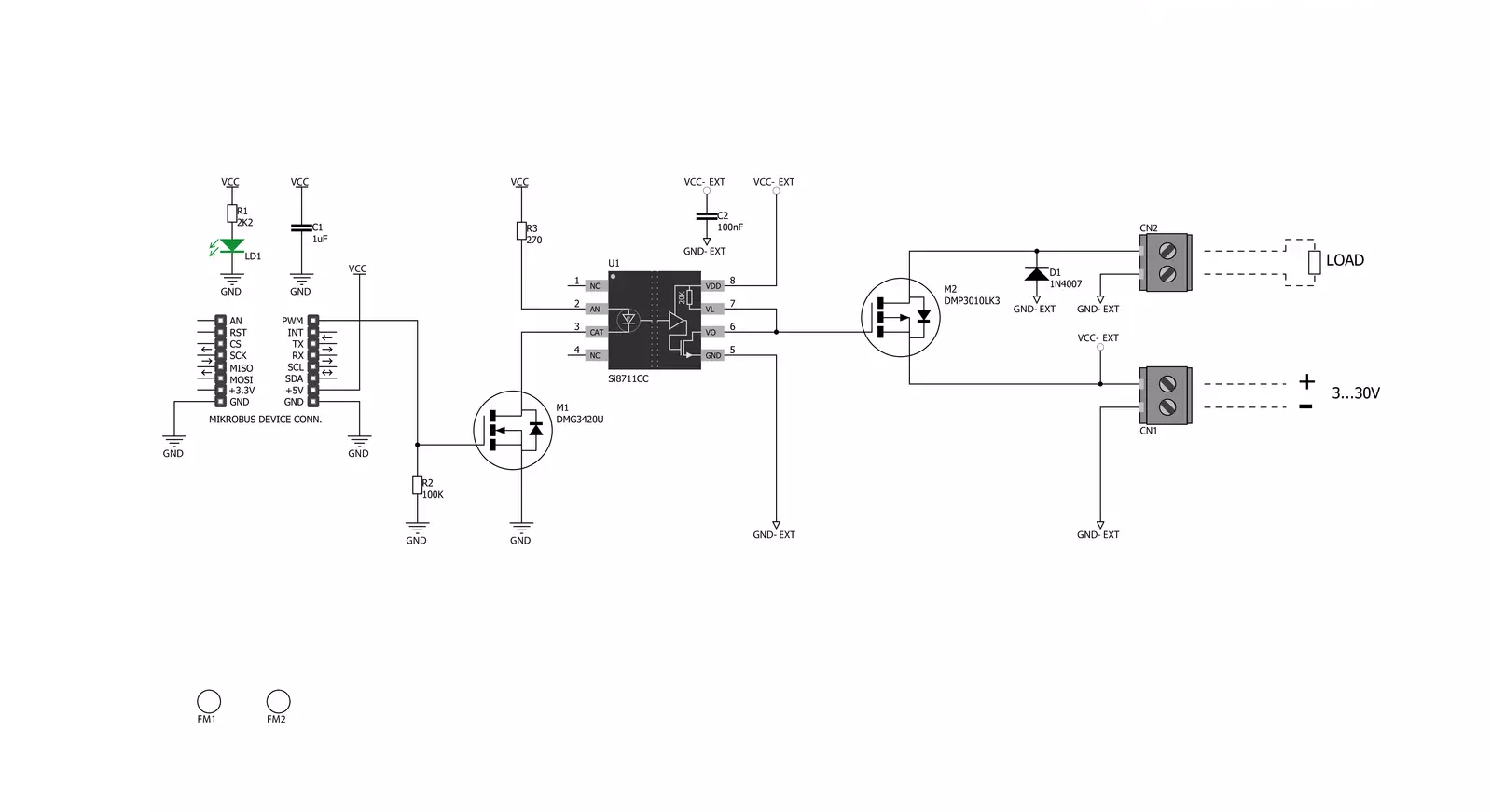
PWM driver Click is based on the Si8711CC, a 5kV LED emulator input, open collector output isolator from Skyworks. Compared to the optocouplers, the Si8711CC is more resistant to temperature, age, and forward current effects. It has a longer service life, higher common-mode transient immunity, and more. The Si8711CC is based on proprietary CMOS isolation technology for low-power, high-speed operation and is resistant to wear-out effects that, in the case of optocouplers, degrade the performance. The Si8711CC features up to 5000VRMS isolation and 10kV surge protection, making it a perfect isolator. For controlling the devices, it is capable of data rates DC of up to 15Mbps, with a propagation delay of 30ns. The Si8711CC controls the loads over the DMP3010LK3,
a P-channel enhancement mode MOSFET from Diodes Incorporated. This fast-switching diode has ESD protected gate, low input capacitance, and low on-resistance, designed to maintain superior switching performance, making it ideal for high-efficiency power management applications. The PWM Driver Click comes with the screw terminals labeled LOAD (+END, -END) to connect the load, which the Si7811CC controls over the DMP3010LK3 diode, and EXT for external power supply. It is not recommended to use this Click board™ with loads over 50W as the MOSFET can get overheated; this, however, does not apply if the Click board™ is used as an ON/OFF switch. The PWM Driver Click is controlled by the host MCU by PWM pulses over the PWM pin of the mikroBUS™ socket. The PWM
pin does not have direct control over the Si8711CC but rather through the DMG3420U, an N-channel enhancement mode MOSFET from Diodes Incorporated. This diode shares many features with the one mentioned above, such as low on-resistance, low input capacitance, fast switching speed, and more. This Click board™ can be operated only with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Fusion for TIVA v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different 32-bit ARM® Cortex®-M based MCUs from Texas Instruments, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over a WiFi network. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for TIVA v8 provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances at any time. Each part of the Fusion for TIVA v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for TIVA v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
Texas Instruments
Pin count
212
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for Tiva v8 as your development board.














Track your results in real time
Application Output via UART Mode
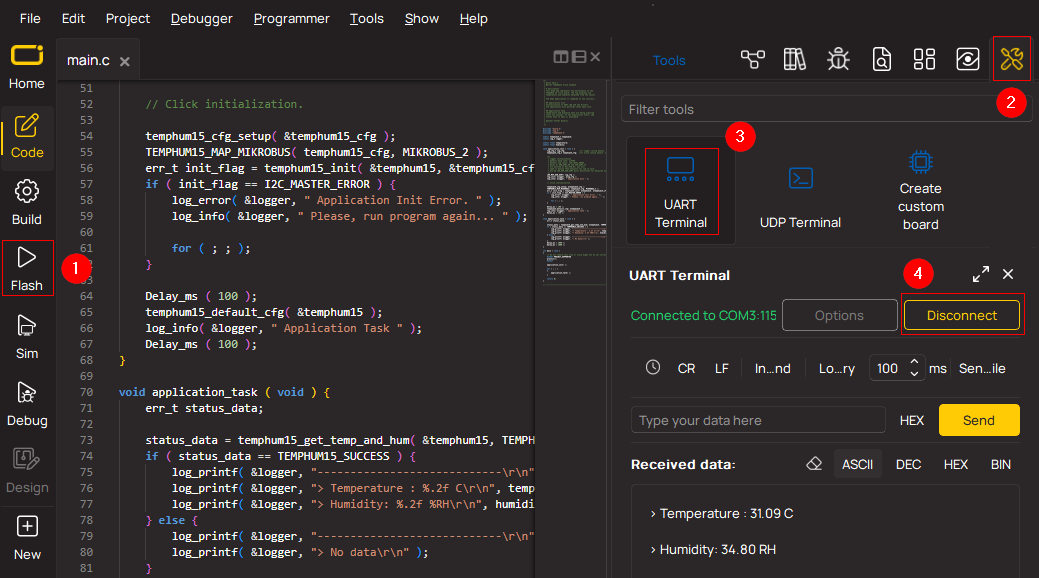
1. Once the code example is loaded, pressing the "FLASH" button initiates the build process, and programs it on the created setup.
2. After the programming is completed, click on the Tools icon in the upper-right panel, and select the UART Terminal.
3. After opening the UART Terminal tab, first check the baud rate setting in the Options menu (default is 115200). If this parameter is correct, activate the terminal by clicking the "CONNECT" button.
4. Now terminal status changes from Disconnected to Connected in green, and the data is displayed in the Received data field.
Software Support
Library Description
This library contains API for PWM driver Click driver.
Key functions:
pwmdriver_set_duty_cycle- Generic sets PWM duty cyclepwmdriver_pwm_stop- Stop PWM modulepwmdriver_pwm_start- Start PWM module
Open Source
Code example
This example can be found in NECTO Studio. Feel free to download the code, or you can copy the code below.
/*!
* @file
* @brief PwmDriver Click example
*
* # Description
* This application is controls the speed DC motors.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enables - GPIO, PWM initialization set PWM duty cycle and PWM frequency,
* start PWM, enable the engine, and start to write log.
*
* ## Application Task
* This is an example that demonstrates the use of the PWM driver Click board.
* This example shows the automatic control of PWM,
* the first increases duty cycle and then the duty cycle is falling.
* Results are being sent to the Usart Terminal where you can track their changes.
*
* *note:*
* EXT PWR 3-30VDC
*
* @author Nikola Peric
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "pwmdriver.h"
// ------------------------------------------------------------------ VARIABLES
static pwmdriver_t pwmdriver;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
pwmdriver_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
pwmdriver_cfg_setup( &cfg );
PWMDRIVER_MAP_MIKROBUS( cfg, MIKROBUS_1 );
pwmdriver_init( &pwmdriver, &cfg );
Delay_ms( 100 );
log_printf( &logger, " Initialization PWM \r\n " );
pwmdriver_set_duty_cycle( &pwmdriver, 0.0 );
pwmdriver_pwm_start( &pwmdriver );
Delay_ms( 1000 );
log_info( &logger, "---- Application Task ----" );
}
void application_task ( void )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float duty = duty_cnt / 10.0;
pwmdriver_set_duty_cycle ( &pwmdriver, duty );
log_printf( &logger, "Duty: %d%%\r\n", ( uint16_t )( duty_cnt * 10 ) );
Delay_ms( 500 );
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
}
duty_cnt += duty_inc;
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END















