Unlock new dimensions of control with TTP224 and TM4C1294NCZAD
Begin with a simple touch

Published Aug 06, 2023
Click board™
TouchKey Click
Dev. board
Fusion for Tiva v8
Compiler
NECTO Studio
MCU
TM4C1294NCZAD
Explore the possibilities of capacitive touch sensing and create interfaces that redefine user interactions
A
A
Hardware Overview
How does it work?
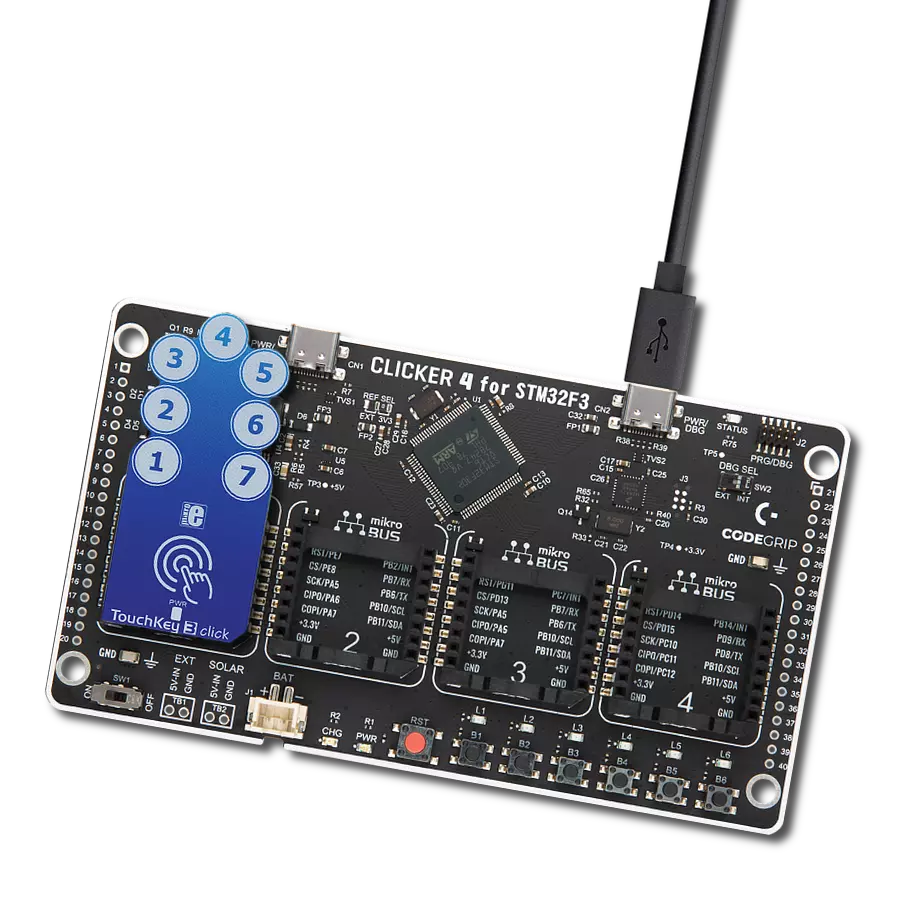
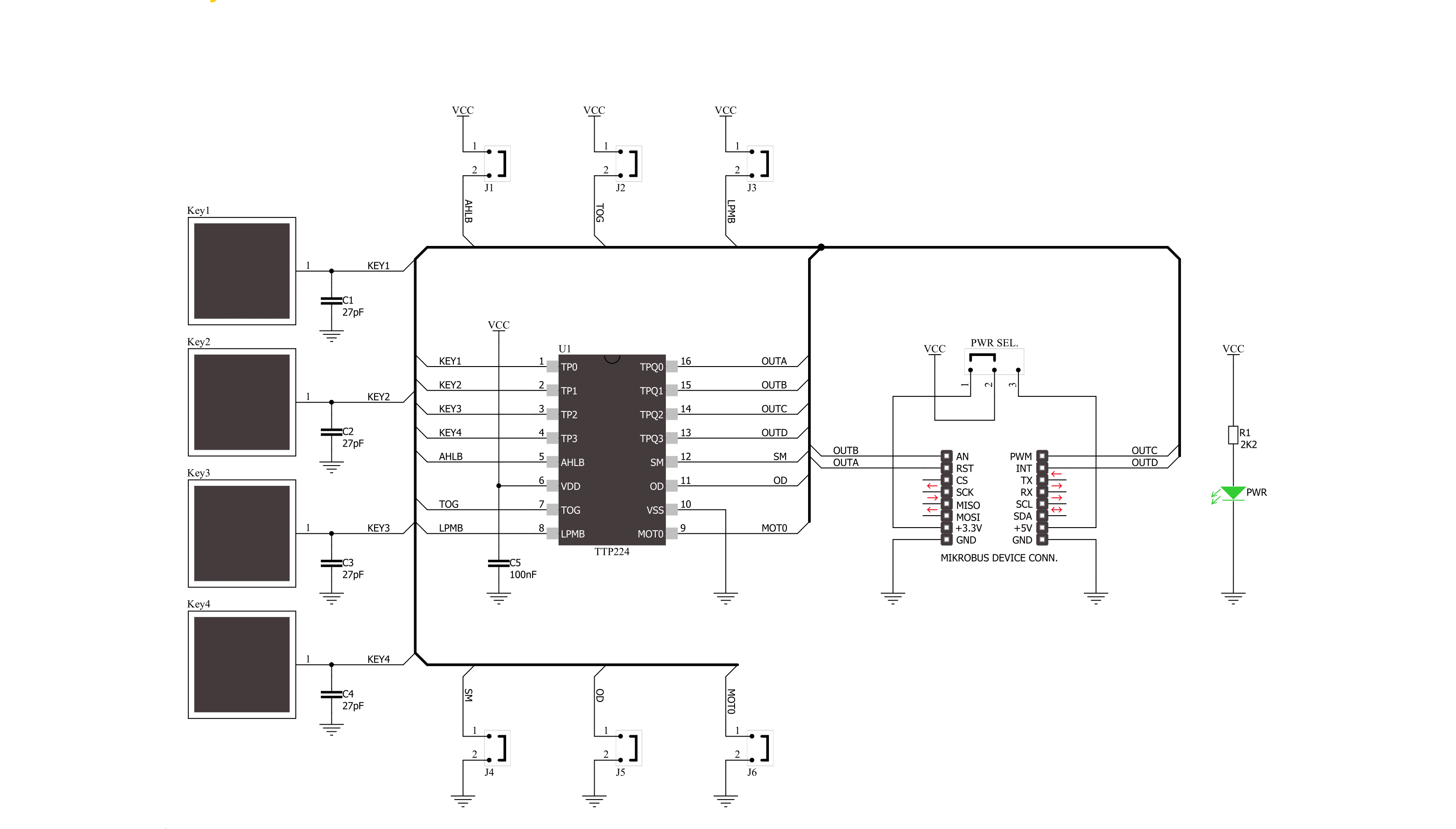
TouchKey Click is based on the TTP224, a four key touch pad detector from TonTouch. The TTP224 has a stable sensing method that can cover diverse conditions and acts as a human interface control panel through non-conductive dielectric materials. It features auto-calibration for life, with a re-calibration period of about 4 seconds when a key has not been touched. The TouchKey Click can detect all four pad activations at once. There are two operating modes: Low Power and Fast mode. Unlike the low-power operating mode, which has a slower response for the first touch, the Fast mode, in addition to a much faster response, also has a slightly higher consumption. When working in Fast mode, if no touch is detected after 8 seconds, the board automatically switches to Low
Power mode. The TouchKey Click has four pads labeled A, B, C, and D. To communicate with the host MCU, the TTP224 uses four digital inputs of the mikroBUS™ socket, labeled just as the pads above, A, B, C, and D. Every touch on the corresponding pad will send the digital state to its assigned pin. The TTP224 has various features that can be addressed on this Click board™ over four solder jumpers. The Low Power or Fast mode option can be set over an LPMB solder jumper (Low Power as a default), while the TOG jumper sets output mode, direct or toggle (direct as a default). Depending on the output state needs, this Click board™ can use active High or Low over the AHLB solder jumper, where the active High is set by default. Objects used to cover the sensor
pads can cause a change in sensing detection. To prevent this change, the maximum key duration time can be set from 16 seconds to infinite via the MOT0 solder jumper (infinite is set as default). Open drain or CMOS output can also be set via the OD solder jumper, with CMOS as the default. The last is an SM solder jumper used to set single or multi-key options, with the multi-key set as the default. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
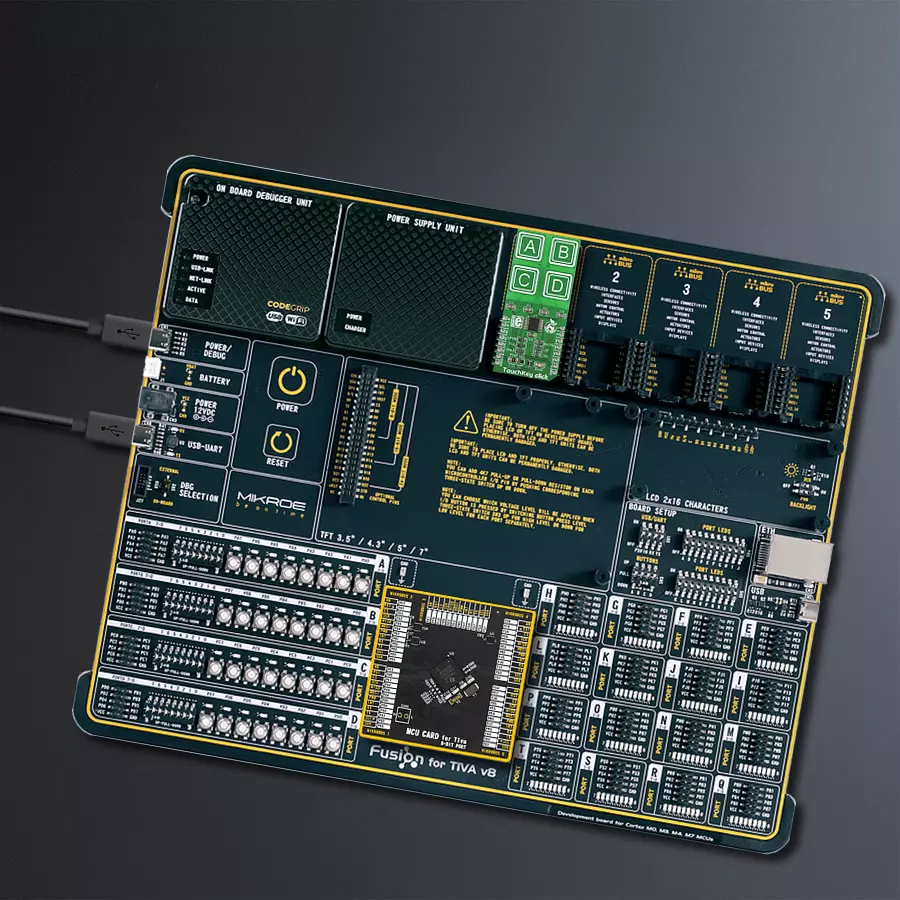
Development board
Fusion for TIVA v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different 32-bit ARM® Cortex®-M based MCUs from Texas Instruments, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over a WiFi network. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for TIVA v8 provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances at any time. Each part of the Fusion for TIVA v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for TIVA v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
Texas Instruments
Pin count
212
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

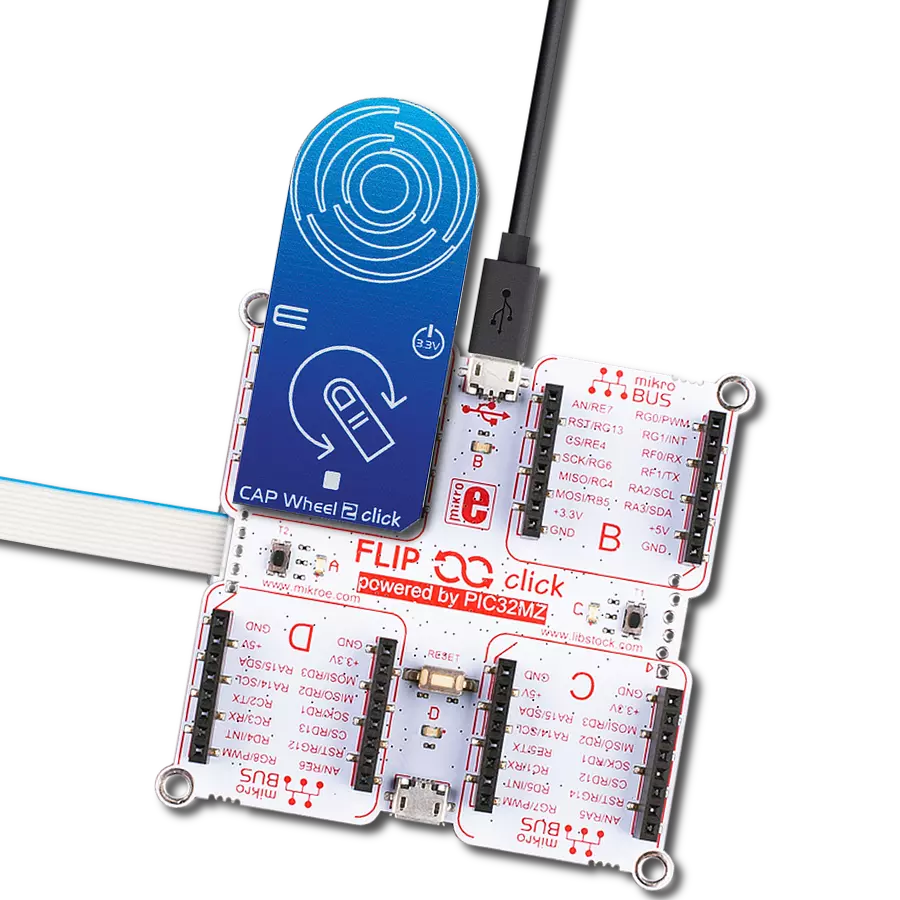
Start by selecting your development board and Click board™. Begin with the Fusion for Tiva v8 as your development board.












Software Support
Library Description
This library contains API for TouchKey Click driver.
Key functions:
touchkey_a- This function gets state of "a" (RST) pin on TouchKey Clicktouchkey_b- This function gets state of "b" (AN) pin on TouchKey Clicktouchkey_c- This function gets state of "c" (PWM) pin on TouchKey Clicktouchkey_d- This function gets state of "d" (INT) pin on TouchKey Click
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief TouchKey Click example
*
* # Description
* This application has four capacitive pads powered by TTP224, a touchpad detector IC.
* Capacitive buttons like these can be toggled even when placed under a layer of glass or paper.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enables GPIO and also starts write log.
*
* ## Application Task
* This example demonstrates the use of TouchKey Click board.
* Detects whether any of the keys is pressed. Results are being sent to the Usart Terminal,
* where you can track changes.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "touchkey.h"
// ------------------------------------------------------------------ VARIABLES
static touchkey_t touchkey;
static log_t logger;
static uint8_t key_state = 0;
static uint8_t key_state_old = 1;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
touchkey_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
touchkey_cfg_setup( &cfg );
TOUCHKEY_MAP_MIKROBUS( cfg, MIKROBUS_1 );
touchkey_init( &touchkey, &cfg );
log_printf( &logger, "Press key\r\n" );
}
void application_task ( void )
{
key_state = touchkey_a( &touchkey ) | touchkey_b( &touchkey ) | touchkey_c( &touchkey ) | touchkey_d( &touchkey );
if( key_state == 1 && key_state_old == 0 )
{
log_printf( &logger,"Pressed : " );
if( touchkey_a( &touchkey ) )
{
log_printf( &logger, "A\r\n " );
}
if( touchkey_b( &touchkey) )
{
log_printf( &logger, "B\r\n " );
}
if( touchkey_c( &touchkey ) )
{
log_printf( &logger, "C\r\n " );;
}
if( touchkey_d( &touchkey ) )
{
log_printf( &logger, "D\r\n " );
}
key_state_old = 1;
}
if ( key_state == 0 && key_state_old == 1 )
{
key_state_old = 0;
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Capacitive