Take your motor control experience to the next level with DRV8874 and STM32F767BI
Precise control, endless possibilities

Published May 31, 2023
Click board™
DC Motor 15 Click
Dev Board
Clicker 4 for STM32
Compiler
NECTO Studio
MCU
STM32F767BI
Embrace the power of brushed motor control today and automagically regulate the current during the Start-up sequence of a DC motor!
A
A
Hardware Overview
How does it work?
DC Motor 15 Click is based on the DRV8874, an integrated motor driver with N-channel H-bridge, charge pump, current sensing and proportional output, current regulation, and protection circuitry from Texas Instruments. The DRV8874 operates from the external power supply from 4.5V to 37V, providing a wide range of output load currents for various motors and loads. The charge pump feature improves efficiency by supporting N-channel MOSFET half-bridges and 100% duty cycle driving. This Click board™ also integrates current sensing, regulation, and feedback. These features allow the DRV8874 to sense the output current without an external sense resistor or sense circuitry reducing system cost and complexity. This also allows the device to limit the output current in the case of the motor stall or high torque events and give detailed feedback to the MCU about the load
current through a proportional output on the AN pin of the mikroBUS™, labeled as IPR. The DRV8874 integrates an H-bridge output power stage that can be operated in different control modes by the PMODE pin setting. The PMODE pin on this Click board™ is set to a logic low level, meaning the device is latched into PH/EN mode. PH/EN mode allows the H-bridge to be controlled with a speed and direction type of interface through two GPIO pins labeled IN2 and IN1, routed to the PWM and CS pins of the mikroBUS™ socket. It also has a Sleep Mode that achieves ultra-low quiescent current draw by shutting down most of the internal circuitry. The SLP pin routed to the RST pin of the mikroBUS™ socket provides an ultra-low power mode to minimize current draw during system inactivity. As mentioned in the product description, DC Motor 15 Click communicates with MCU using several GPIO pins.
In addition to the pins used to adjust the speed and rotation direction of the motor, this Click board™ also has an interrupt labeled as FLT routed to the INT pin of the mikroBUS™ socket used to protect the device and the output load. The DRV8874 enters Fault Mode when a fault is encountered, leaves Fault Mode, and re-enters Active Mode when the recovery condition is met. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Clicker 4 for STM32 is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4 microcontroller, the STM32F767BI from STMicroelectronics, four mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a debugger/programmer connector, two 23-pin headers for interfacing with external electronics, and more. Thanks to innovative manufacturing technology, it allows you to build gadgets with
unique functionalities and features quickly. Each part of the Clicker 4 for STM32 development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 4 for STM32 programming method, using an external CODEGRIP or mikroProg programmer connected to the onboard JTAG/SWD header, the Clicker 4 board also includes a clean and regulated power supply block. It provides several ways of board-powering; through the USB Type-C (USB-C) connector using a power supply delivered by the USB HOST (i.e., personal computer), USB wall
adapter, or a Li-Po/Li-Ion battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board (plus USB-DEVICE), including the well-established mikroBUS™ socket, several user-configurable buttons, and LED indicators. Clicker 4 for STM32 is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M7
MCU Memory (KB)
2048
Silicon Vendor
STMicroelectronics
Pin count
208
RAM (Bytes)
524288
You complete me!
Accessories
DC Gear Motor - 430RPM (3-6V) represents an all-in-one combination of a motor and gearbox, where the addition of gear leads to a reduction of motor speed while increasing the torque output. This gear motor has a spur gearbox, making it a highly reliable solution for applications with lower torque and speed requirements. The most critical parameters for gear motors are speed, torque, and efficiency, which are, in this case, 520RPM with no load and 430RPM at maximum efficiency, alongside a current of 60mA and a torque of 50g.cm. Rated for a 3-6V operational voltage range and clockwise/counterclockwise rotation direction, this motor represents an excellent solution for many functions initially performed by brushed DC motors in robotics, medical equipment, electric door locks, and much more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Clicker 4 for STM32 as your development board.














Track your results in real time
Application Output via Debug Mode
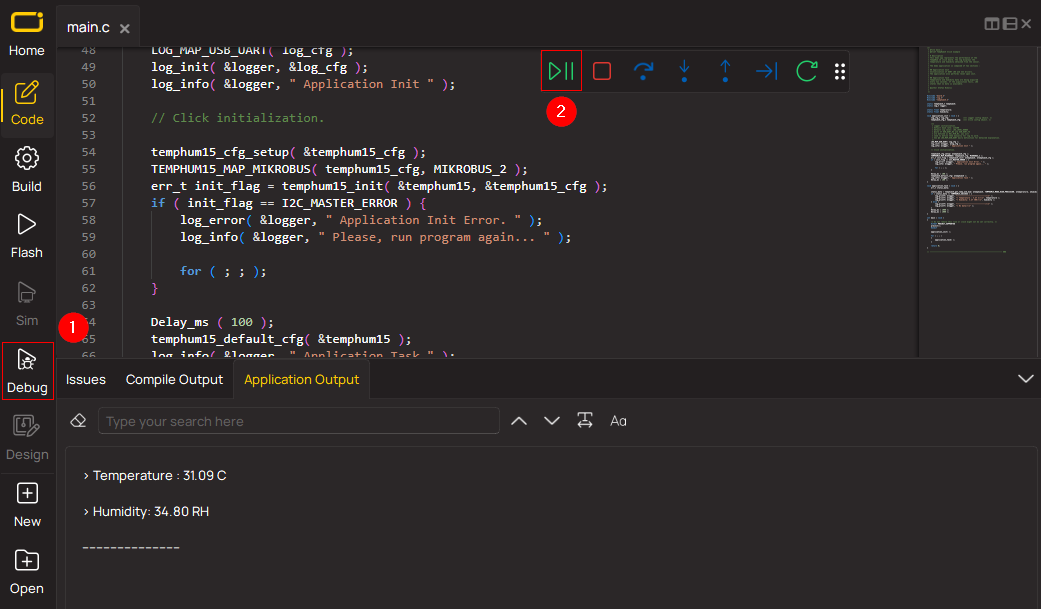
1. Once the code example is loaded, pressing the "DEBUG" button initiates the build process, programs it on the created setup, and enters Debug mode.
2. After the programming is completed, a header with buttons for various actions within the IDE becomes visible. Clicking the green "PLAY" button starts reading the results achieved with the Click board™. The achieved results are displayed in the Application Output tab.
Software Support
Library Description
This library contains API for DC Motor 15 Click driver.
Key functions:
void dcmotor15_forward ( );- Function is used to drive the motor forward.void dcmotor15_reverse ( );- Function is used to drive the motor in reverse.void dcmotor15_brake ( );- Function is used to brake the motor.
Open Source
Code example
This example can be found in NECTO Studio. Feel free to download the code, or you can copy the code below.
/*!
* @file main.c
* @brief DC Motor 15 Click Example.
*
* # Description
* This example demonstrates the use of DC Motor 15 click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and makes an initial log.
*
* ## Application Task
* Drives the motor in the forward direction for 5 seconds, then pulls brake for 2 seconds,
* and after that drives it in the reverse direction for 5 seconds, and finally,
* disconnects the motor for 2 seconds. It will also calculates and displays the motor current consumption.
* Each step will be logged on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "dcmotor15.h"
// Number of ADC conversions that will be performed for a single current measurement.
#define NUM_OF_ADC_CONVERSATIONS 1000
// Time period for forward and reverse modes in seconds.
#define RUN_PERIOD 6
// Time period for brake and stop modes in seconds.
#define IDLE_PERIOD 3
static dcmotor15_t dcmotor15; /**< DC Motor 15 Click driver object. */
static log_t logger; /**< Logger object. */
void display_current ( dcmotor15_t *ctx, uint16_t delay )
{
float current = 0;
for ( uint8_t cnt = 0; cnt < delay; cnt++ )
{
Delay_ms( 1000 );
current = dcmotor15_get_current ( &dcmotor15, NUM_OF_ADC_CONVERSATIONS );
log_printf( &logger, " Current : %.3f [A]\r\n", current );
}
log_printf( &logger, " ------------------------------\r\n" );
}
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
dcmotor15_cfg_t dcmotor15_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
Delay_ms( 100 );
log_info( &logger, " Application Init " );
// Click initialization.
dcmotor15_cfg_setup( &dcmotor15_cfg );
DCMOTOR15_MAP_MIKROBUS( dcmotor15_cfg, MIKROBUS_1 );
if ( ADC_ERROR == dcmotor15_init( &dcmotor15, &dcmotor15_cfg ) )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
dcmotor15_default_cfg ( &dcmotor15 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
log_printf( &logger, " The motor turns forward! \r\n" );
dcmotor15_forward( &dcmotor15 );
display_current ( &dcmotor15, RUN_PERIOD );
log_printf( &logger, " Pull brake! \r\n" );
dcmotor15_brake( &dcmotor15 );
display_current ( &dcmotor15, IDLE_PERIOD );
log_printf( &logger, " The motor turns in reverse! \r\n" );
dcmotor15_reverse( &dcmotor15 );
display_current ( &dcmotor15, RUN_PERIOD );
log_printf( &logger, " The motor is disconnected (High-Z)! \r\n" );
dcmotor15_stop( &dcmotor15 );
display_current ( &dcmotor15, IDLE_PERIOD );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END















