Enhance magnetic field detection with TLI5012B-E1000 and PIC18F2515
Revolutionizing angle sensing with GMR technology

Published Nov 01, 2023
Click board™
GMR Angle Click
Dev. board
EasyPIC v8
Compiler
NECTO Studio
MCU
PIC18F2515
Discover the transformative power of Giant Magneto Resistance (GMR) elements, enhancing precision in measuring magnetic field orientations.
A
A
Hardware Overview
How does it work?
GMR Angle Click is based on the TLI5012B E1000, a GMR-based 360° angle sensor from Infineon for detects any kind the orientation of a magnetic field, and the analog multiplexer 74HCT4053, switch a bi-directional Synchronous Serial Communication DATA line. This is achieved by measuring sine and cosine angle components with monolithic integrated Giant Magneto Resistance (iGMR) elements. These raw signals (sine and cosine) are digitally processed internally to calculate the angle orientation of the magnetic field (magnet). The calibration parameters are stored in laser fuses. At start-up the values of the fuses are written into flip-flops, where these values can be changed by the application-specific parameters. Further precision of the angle measurement over a wide temperature range and a long lifetime are improved with the internal autocalibration algorithm. The Giant Magneto Resistance (GMR) sensor is implemented using vertical integration. This means that the
GMR-sensitive areas are integrated above the logic part of the TLI5012B E1000 device. These GMR elements change their resistance depending on the direction of the magnetic field. Four individual GMR elements are connected to one Wheatstone sensor bridge. These GMR elements sense one of two components of the applied magnetic field: • X component, Vx (cosine) or the • Y component, Vy (sine) With this full-bridge structure the maximum GMR signal is available and temperature effects cancel out each other. The GMR Angle click also features the 74HCT4053, which is a triple single-pole double-throw analog switch (3x SPDT) suitable for use in analog or digital 2:1 multiplexer/demultiplexer applications. Each switch features a digital select input (Sn), two independent inputs/outputs (nY0 and nY1) and a common input/output (nZ). A digital enable input (E) is common to all switches. When E is HIGH, the switches are turned off. Inputs include clamp diodes. This enables the use of current limiting
resistors to interface inputs to voltages in excess of VCC. When CSS pin on microBUS is HIGH, switches in multiplexer connect DATA line with MOSI line, in other case when CSS pin is LOW, swithces connect DATA line with MISO line. The 74HCT4053 is mainly used for Analog multiplexing and demultiplexing, Digital multiplexing and demultiplexing and Signal gating, but in this one the 74HCT4053 is used for selection SPI line. These feature enable the GMR Angle click to be used for various applications, most notably for angular position sensing in industrial and consumer applications such as electrical commutated motor (e.g. BLDC), fans or pumps. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. This Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.


Features overview
Development board
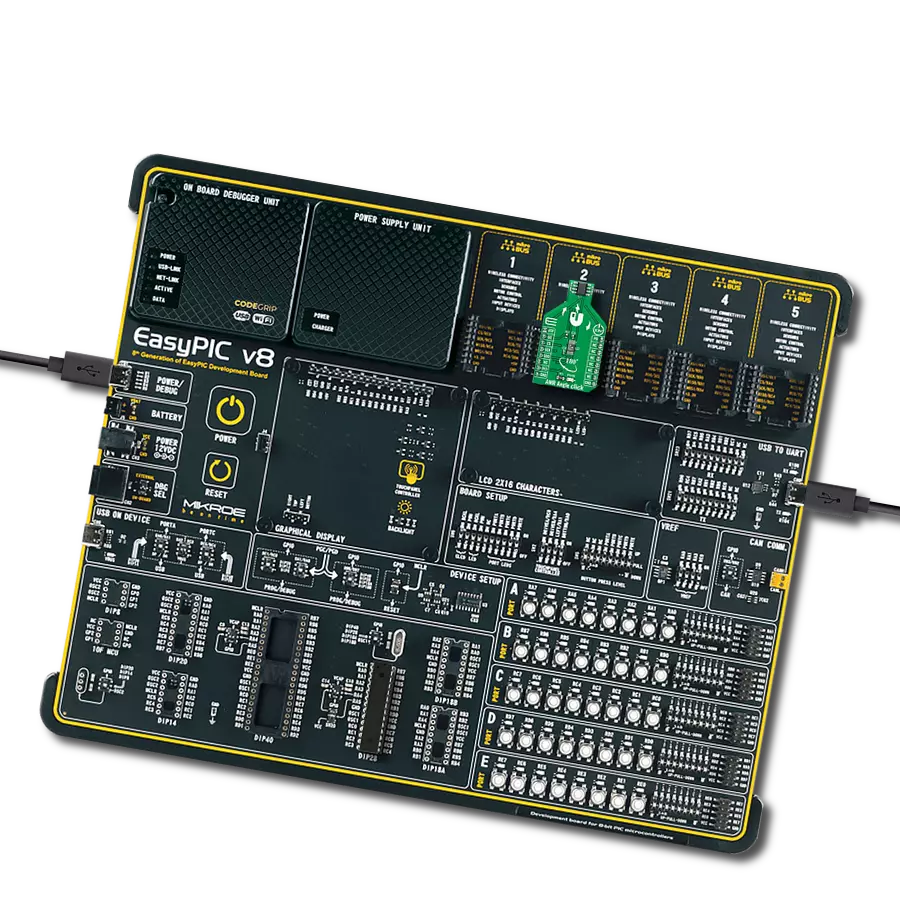
EasyPIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports many high pin count 8-bit PIC microcontrollers from Microchip, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, EasyPIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the EasyPIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB DEVICE, and CAN are also included, including the well-established mikroBUS™ standard, two display options (graphical and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 8-bit PIC MCUs, from the smallest PIC MCU devices with only eight up to forty pins. EasyPIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
48
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
3968
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyPIC v8 as your development board.














Software Support
Library Description
This library contains API for GMR Angle Click driver.
Key functions:
gmrangle_read_data- Generic read 16-bit data functiongmrangle_write_data- Generic write 16-bit data functiongmrangle_calculate_angle- Calculate angle function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief GmrAngle Click example
*
* # Description
* This is an example which demonstrates the use of GMR Angle Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes GPIO pins, SPI and LOG modules.
*
* ## Application Task
* Display angle value in degrees.
* Results are being sent to the Usart Terminal where you can track their changes.
* All data logs write on USB uart changes for every 300 msec.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "gmrangle.h"
// ------------------------------------------------------------------ VARIABLES
static gmrangle_t gmrangle;
static log_t logger;
static float angle;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
gmrangle_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
gmrangle_cfg_setup( &cfg );
GMRANGLE_MAP_MIKROBUS( cfg, MIKROBUS_1 );
gmrangle_init( &gmrangle, &cfg );
GMRANGLE_SET_DATA_SAMPLE_EDGE;
log_printf( &logger, "---------------------\r\n" );
log_printf( &logger, " GMR Angle Click\r\n" );
log_printf( &logger, "---------------------\r\n" );
log_printf( &logger, " Start\r\n" );
log_printf( &logger, "---------------------\r\n" );
Delay_ms ( 100 );
}
void application_task ( void )
{
angle = gmrangle_calculate_angle( &gmrangle );
log_printf( &logger, " Angle is %.1f\r\n", angle );
Delay_ms ( 300 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END