Elevate your projects with RTC feature through RV5C387A and PIC18F24J11
The clock that never stops ticking: Meet our RTC marvel!

Published Dec 29, 2023
Click board™
RTC 17 Click
Dev. board
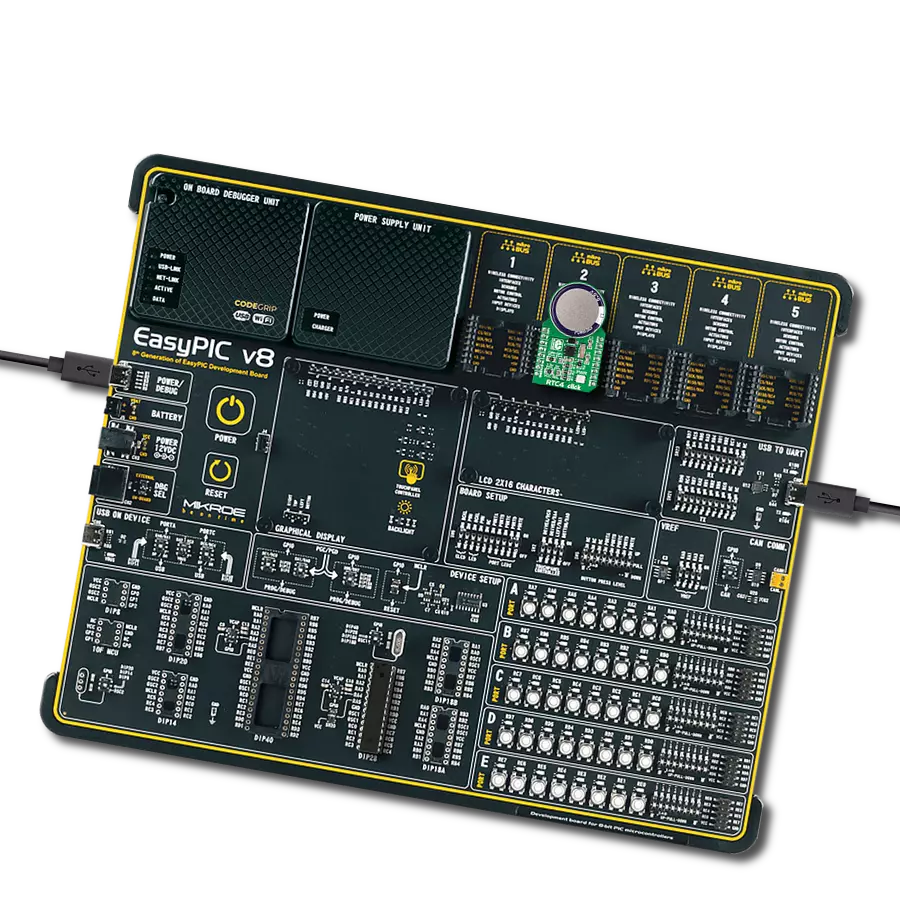
EasyPIC v7
Compiler
NECTO Studio
MCU
PIC18F24J11
Experience seamless synchronization of time-sensitive operations with high-precision real-time clock solution
A
A
Hardware Overview
How does it work?
RTC 17 Click is based on the RV5C387A, an I2C configurable real-time clock/calendar optimized for low-power operations from Nisshinbo Micro Devices. The RV5C387A is configured to transmit calendar and time data to the MCU and comes with an integrated interrupt generation function. It reads and writes time data from and to the MCU in units ranging from seconds to the last two digits of the calendar year. The calendar year will automatically be identified as a leap year when its last two digits are a multiple of 4. Consequently, leap years up to the year 2099 can automatically be recognized. This Click board™ communicates with MCU using the standard I2C 2-Wire interface to read data and configure settings, supporting a Fast Mode operation up to 400kHz. It also
incorporates an alarm circuit configured to generate an interrupt signal to the INT pin of the mikroBUS™ socket from its A, B, or C interrupt pin at preset times. The alarm circuit allows two alarm settings specified by the Alarm_W and the Alarm_D registers. The Alarm_W registers (interrupt B) allow a week, hour, and minute alarm settings, including combinations of multiple day-of-week settings such as Monday and Wednesday, while the Alarm_D registers (interrupt C) allow an hour and minute alarm settings. Besides, the RV5C387A can generate periodic interrupt signals aside from interrupt signals generated by the alarm circuit from the interrupt A pin. The RTC 17 Click also has an onboard header labeled CLKO, which provides clock pulses of 32kHz. Like this
one, the most common RTC configuration is a battery-backed-up, which maintains time and continues its work without interruption in the event of a power failure. That’s why, besides the BU9873, the RTC 17 Click is equipped with a button cell battery holder compatible with the 3000TR battery holder, suitable for 12mm Coin Cell batteries. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
EasyPIC v7 is the seventh generation of PIC development boards specially designed to develop embedded applications rapidly. It supports a wide range of 8-bit PIC microcontrollers from Microchip and has a broad set of unique functions, such as a powerful onboard mikroProg programmer and In-Circuit debugger over USB-B. The development board is well organized and designed so that the end-user has all the necessary elements in one place, such as switches, buttons, indicators, connectors, and others. With four different connectors for each port, EasyPIC v7 allows you to connect accessory boards, sensors, and custom electronics more efficiently than ever. Each part of
the EasyPIC v7 development board contains the components necessary for the most efficient operation of the same board. An integrated mikroProg, a fast USB 2.0 programmer with mikroICD hardware In-Circuit Debugger, offers many valuable programming/debugging options and seamless integration with the Mikroe software environment. Besides it also includes a clean and regulated power supply block for the development board. It can use various external power sources, including an external 12V power supply, 7-23V AC or 9-32V DC via DC connector/screw terminals, and a power source via the USB Type-B (USB-B) connector. Communication options such as
USB-UART and RS-232 are also included, alongside the well-established mikroBUS™ standard, three display options (7-segment, graphical, and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 8-bit PIC MCUs, from PIC10F, PIC12F, PIC16F, PIC16Enh, PIC18F, PIC18FJ, and PIC18FK families. EasyPIC v7 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
16
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
3800
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyPIC v7 as your development board.














Software Support
Library Description
This library contains API for RTC 17 Click driver.
Key functions:
rtc17_set_time- This function sets the starting time values - second, minute and hourrtc17_read_time- This function reads the current time values - second, minute and hourrtc17_read_date- This function reads the current date values - day of week, day, month and year
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief RTC17 Click example
*
* # Description
* This example demonstrates the use of RTC 17 Click board by reading and displaying
* the time and date values.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and logger and performs the Click default configuration
* which sets 24h time mode and interrupt to be synchronized with second count-up.
* And after that setting the starting time and date.
*
* ## Application Task
* Waits for the second count-up interrupt and then reads and displays the current
* time and date values on the USB UART.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "rtc17.h"
static rtc17_t rtc17;
static log_t logger;
static rtc17_time_t time;
static rtc17_date_t date;
/**
* @brief RTC 17 get day of week name function.
* @details This function returns the name of day of the week as a string.
* @param[in] ctx : Click context object.
* See #rtc17_t object definition for detailed explanation.
* @param[in] day_of_week : Day of week decimal value.
* @return Name of day as a string.
* @note None.
*/
static char *rtc17_get_day_of_week_name ( uint8_t day_of_week );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
rtc17_cfg_t rtc17_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
rtc17_cfg_setup( &rtc17_cfg );
RTC17_MAP_MIKROBUS( rtc17_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == rtc17_init( &rtc17, &rtc17_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( RTC17_ERROR == rtc17_default_cfg ( &rtc17 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
time.hour = 23;
time.minute = 59;
time.second = 50;
if ( RTC17_OK == rtc17_set_time ( &rtc17, &time ) )
{
log_printf( &logger, " Set time: %.2u:%.2u:%.2u\r\n",
( uint16_t ) time.hour, ( uint16_t ) time.minute, ( uint16_t ) time.second );
}
date.day_of_week = RTC17_SATURDAY;
date.day = 31;
date.month = 12;
date.year = 22;
if ( RTC17_OK == rtc17_set_date ( &rtc17, &date ) )
{
log_printf( &logger, " Set date: %s, %.2u.%.2u.20%.2u.\r\n",
rtc17_get_day_of_week_name ( date.day_of_week ),
( uint16_t ) date.day, ( uint16_t ) date.month, ( uint16_t ) date.year );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
// Wait for interrupt which is synchronized with second count-up
while ( rtc17_get_int_pin ( &rtc17 ) );
rtc17_clear_interrupts ( &rtc17 );
if ( RTC17_OK == rtc17_read_time ( &rtc17, &time ) )
{
log_printf( &logger, " Time: %.2u:%.2u:%.2u\r\n",
( uint16_t ) time.hour, ( uint16_t ) time.minute, ( uint16_t ) time.second );
}
if ( RTC17_OK == rtc17_read_date ( &rtc17, &date ) )
{
log_printf( &logger, " Date: %s, %.2u.%.2u.20%.2u.\r\n\n",
rtc17_get_day_of_week_name ( date.day_of_week ),
( uint16_t ) date.day, ( uint16_t ) date.month, ( uint16_t ) date.year );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static char *rtc17_get_day_of_week_name ( uint8_t day_of_week )
{
switch ( day_of_week )
{
case RTC17_MONDAY:
{
return "Monday";
}
case RTC17_TUESDAY:
{
return "Tuesday";
}
case RTC17_WEDNESDAY:
{
return "Wednesday";
}
case RTC17_THURSDAY:
{
return "Thursday";
}
case RTC17_FRIDAY:
{
return "Friday";
}
case RTC17_SATURDAY:
{
return "Saturday";
}
case RTC17_SUNDAY:
{
return "Sunday";
}
default:
{
return "Unknown";
}
}
}
// ------------------------------------------------------------------------ END