Measure distances across 8x8 configurable zones for detailed spatial mapping with VL53L8CH and STM32F031K6
Time-of-Flight sensing solution for AI apps with a wide 65° diagonal FoV

Published Feb 13, 2025
Click board™
LightRanger 12 Click
Dev. board
Nucleo 32 with STM32F031K6 MCU
Compiler
NECTO Studio
MCU
STM32F031K6
Achieve precise distance measurement and spatial mapping with multizone ToF technology
A
A
Hardware Overview
How does it work?
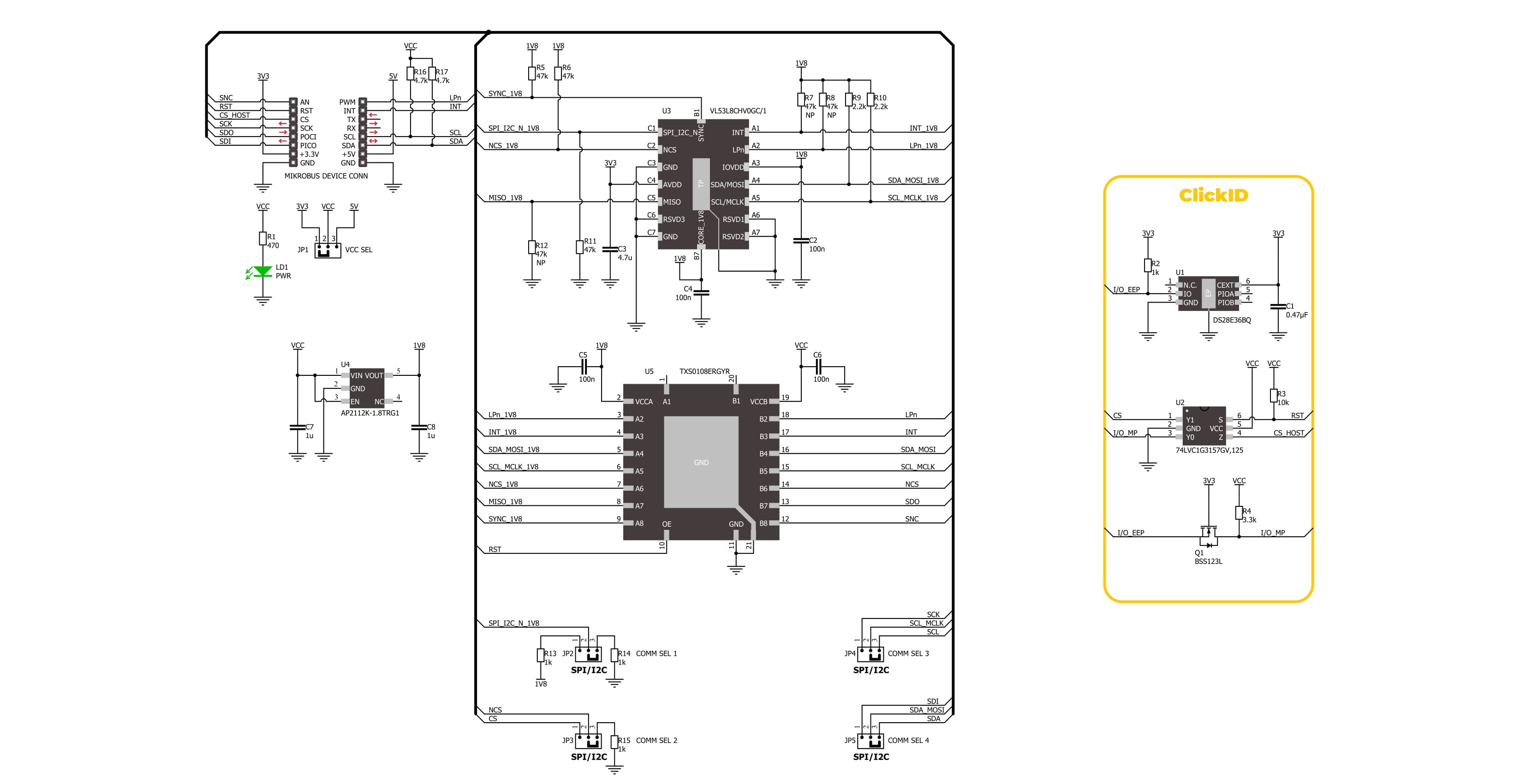
LightRanger 12 Click is based on the VL53L8CH, an 8x8 multizone Time-of-Flight (ToF) sensor from STMicroelectronics, designed for AI applications with exceptional performance under ambient light conditions. This sensor offers a wide 65° diagonal field of view (45° x 45° square), making it ideal for precise distance measurement and spatial mapping applications. It introduces a Compact and Normalized Histogram (CNH) data output format, specifically made for artificial intelligence applications that demand multizone raw data from a high-performance optical sensor, including AI-driven robotics, smart appliances like coffee machines and beverage dispensers, smart home solutions, and advanced recognition systems. The VL53L8CH integrates a powerful new-generation Vertical-Cavity Surface-Emitting Laser (VCSEL) and two advanced metasurface lenses, enhancing its optical capabilities. The VCSEL emits an invisible 940 nm IR light that is Class 1 certified, ensuring eye safety while maintaining high performance. It also provides unparalleled flexibility by allowing users to configure up to 64 zones (8x8 grid), adjust histogram resolution to 128 bins, and define bin widths. Each zone's infrared signal is transmitted to the host as raw histogram data, complementing the standard ToF sensor outputs, such as ranging distances up to 400 cm, signal
levels, and reflectance. By combining raw histogram data with traditional ranging capabilities, the VL53L8CH unlocks endless possibilities beyond standard distance measurement. It can detect and differentiate between solid materials like carpet, wood, glass, mirrors and fluids such as water, oil, or chemicals. This makes it possible to identify the location and size of a cup in coffee machines or beverage dispensers, detect floor materials for robotic navigation, or develop advanced AI-driven features like gesture motion recognition, hand posture detection, and even shape or motion analysis. Additionally, the sensor is suited for applications like people counting in smart homes and buildings. Sensor data are accessed through the I2C or SPI interface, with a maximum frequency of 1MHz for I2C and 3MHz for SPI communication. The selection is made by positioning SMD jumpers labeled COMM SEL appropriately. Note that all the jumpers' positions must be on the same side, or the Click board™ may become unresponsive. In addition to the interface pins, this board uses several other pins. The SNC pin on the mikroBUS™ socket offers dual functionality: it can serve as a synchronization input, enabling the sensor to align its measurements with external events or signals for precise timing and coordination in applications requiring high
accuracy, or it can act as a general-purpose open-drain input/output pin, providing added versatility for control or signaling tasks tailored to specific application needs. The LP pin allows users to toggle the I2C communication ON or OFF while in low-power mode, which is particularly useful for changing the I2C address in multi-device systems. Lastly, the INT pin provides an interrupt signal to indicate when a ranging measurement is available, ensuring data handling and real-time responsiveness. The VL53L8CH does not require a specific Power-Up sequence but requires a voltage of 1.8V for its interface and logic part to work correctly. Therefore, a small regulating LDO, the AP2112, provides a 1.8V out of selected mikroBUS™ power rail. Since the sensor operates on 1.8V, this Click board™ also features the TXB0108E voltage-level translator, allowing the VL53L8CH to work properly with 3.3V and 5V MCU. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Nucleo 32 with STM32F031K6 MCU board provides an affordable and flexible platform for experimenting with STM32 microcontrollers in 32-pin packages. Featuring Arduino™ Nano connectivity, it allows easy expansion with specialized shields, while being mbed-enabled for seamless integration with online resources. The
board includes an on-board ST-LINK/V2-1 debugger/programmer, supporting USB reenumeration with three interfaces: Virtual Com port, mass storage, and debug port. It offers a flexible power supply through either USB VBUS or an external source. Additionally, it includes three LEDs (LD1 for USB communication, LD2 for power,
and LD3 as a user LED) and a reset push button. The STM32 Nucleo-32 board is supported by various Integrated Development Environments (IDEs) such as IAR™, Keil®, and GCC-based IDEs like AC6 SW4STM32, making it a versatile tool for developers.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M0
MCU Memory (KB)
32
Silicon Vendor
STMicroelectronics
Pin count
32
RAM (Bytes)
4096
You complete me!
Accessories
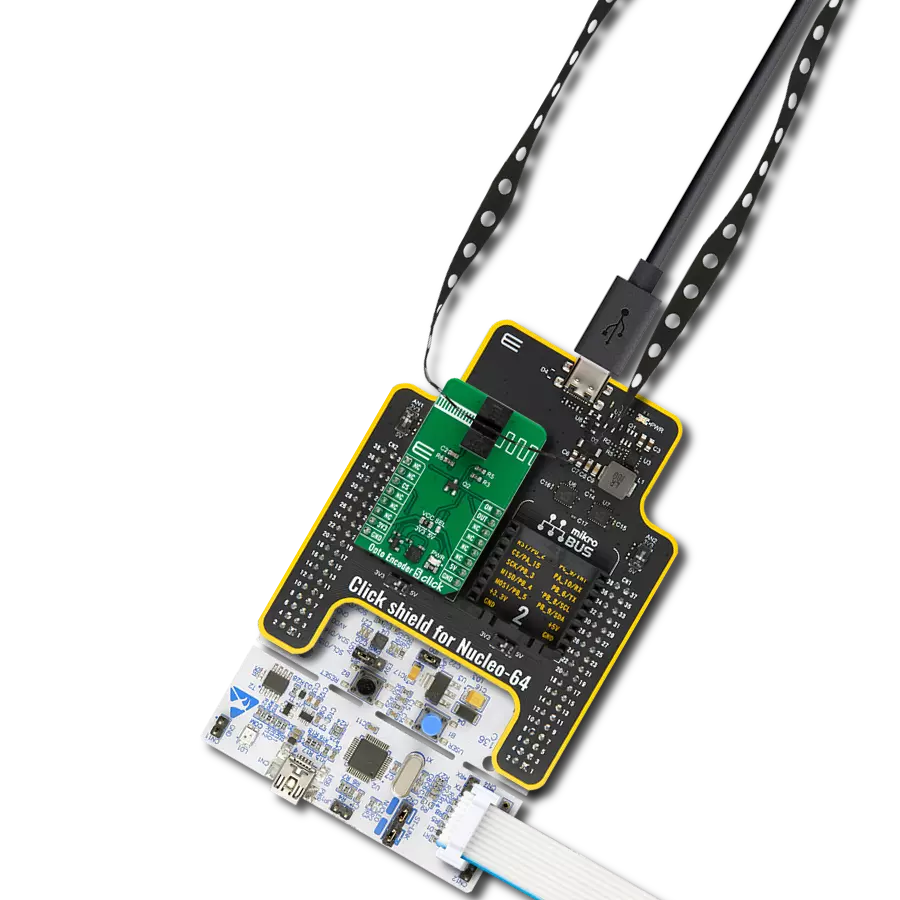
Click Shield for Nucleo-32 is the perfect way to expand your development board's functionalities with STM32 Nucleo-32 pinout. The Click Shield for Nucleo-32 provides two mikroBUS™ sockets to add any functionality from our ever-growing range of Click boards™. We are fully stocked with everything, from sensors and WiFi transceivers to motor control and audio amplifiers. The Click Shield for Nucleo-32 is compatible with the STM32 Nucleo-32 board, providing an affordable and flexible way for users to try out new ideas and quickly create prototypes with any STM32 microcontrollers, choosing from the various combinations of performance, power consumption, and features. The STM32 Nucleo-32 boards do not require any separate probe as they integrate the ST-LINK/V2-1 debugger/programmer and come with the STM32 comprehensive software HAL library and various packaged software examples. This development platform provides users with an effortless and common way to combine the STM32 Nucleo-32 footprint compatible board with their favorite Click boards™ in their upcoming projects.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Nucleo 32 with STM32F031K6 MCU as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
LightRanger 12 Click demo application is developed using the NECTO Studio, ensuring compatibility with mikroSDK's open-source libraries and tools. Designed for plug-and-play implementation and testing, the demo is fully compatible with all development, starter, and mikromedia boards featuring a mikroBUS™ socket.
Example Description
This example demonstrates the use of LightRanger 12 Click board by reading and displaying 8x8 zones measurements on the USB UART.
Key functions:
lightranger12_cfg_setup- Config Object Initialization function.lightranger12_init- Initialization function.lightranger12_default_cfg- Click Default Configuration function.lightranger12_get_int_pin- This function returns the INT (interrupt) pin logic state.lightranger12_get_resolution- This function gets the current resolution (4x4 or 8x8).lightranger12_get_ranging_data- This function gets the ranging data, using the selected output and the resolution.
Application Init
Initializes the driver and performs the Click default configuration.
Application Task
Reads all zone measurements approximately every 200ms and logs them to the USB UART as an 8x8 map. The silicon temperature measurement in degrees Celsius is also displayed.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief LightRanger 12 Click example
*
* # Description
* This example demonstrates the use of LightRanger 12 Click board by reading and displaying
* 8x8 zones measurements on the USB UART.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Reads all zone measurements approximately every 200ms and logs them to the USB UART as an 8x8 map.
* The silicon temperature measurement in degrees Celsius is also displayed.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "lightranger12.h"
static lightranger12_t lightranger12;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
lightranger12_cfg_t lightranger12_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
lightranger12_cfg_setup( &lightranger12_cfg );
LIGHTRANGER12_MAP_MIKROBUS( lightranger12_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == lightranger12_init( &lightranger12, &lightranger12_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( LIGHTRANGER12_ERROR == lightranger12_default_cfg ( &lightranger12 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
err_t error_flag = LIGHTRANGER12_OK;
lightranger12_results_data_t results;
uint8_t resolution = 0;
uint8_t map_side = 0;
// Wait for a data ready interrupt
while ( lightranger12_get_int_pin ( &lightranger12 ) );
error_flag |= lightranger12_get_resolution ( &lightranger12, &resolution );
error_flag |= lightranger12_get_ranging_data ( &lightranger12, &results );
if ( LIGHTRANGER12_OK == error_flag )
{
map_side = ( LIGHTRANGER12_RESOLUTION_4X4 == resolution ) ? 4 : 8;
log_printf ( &logger, "----------------------- %ux%u MAP (mm) -----------------------\r\n",
( uint16_t ) map_side, ( uint16_t ) map_side );
for ( uint8_t cnt_0 = 1; cnt_0 <= map_side; cnt_0++ )
{
for ( uint8_t cnt_1 = 1; cnt_1 <= map_side; cnt_1++ )
{
// Checking the zone measurement validity (5 & 9 means ranging OK)
if ( ( 5 == results.target_status[ cnt_0 * map_side - cnt_1 ] ) ||
( 9 == results.target_status[ cnt_0 * map_side - cnt_1 ] ) )
{
log_printf ( &logger, "%d\t", results.distance_mm[ cnt_0 * map_side - cnt_1 ] );
}
else
{
log_printf ( &logger, "NOK\t" );
}
}
log_printf ( &logger, "\r\n" );
Delay_ms ( 5 );
}
log_printf ( &logger, "Silicon temperature : %d degC\r\n", ( int16_t ) results.silicon_temp_degc );
log_printf ( &logger, "------------------------------------------------------------\r\n\n" );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Optical