Detect falls and impacts easily with MXC62320MP and STM32L496AG
Making sense of motion: The magic of accelerometers
Published Jul 22, 2025
Click board™
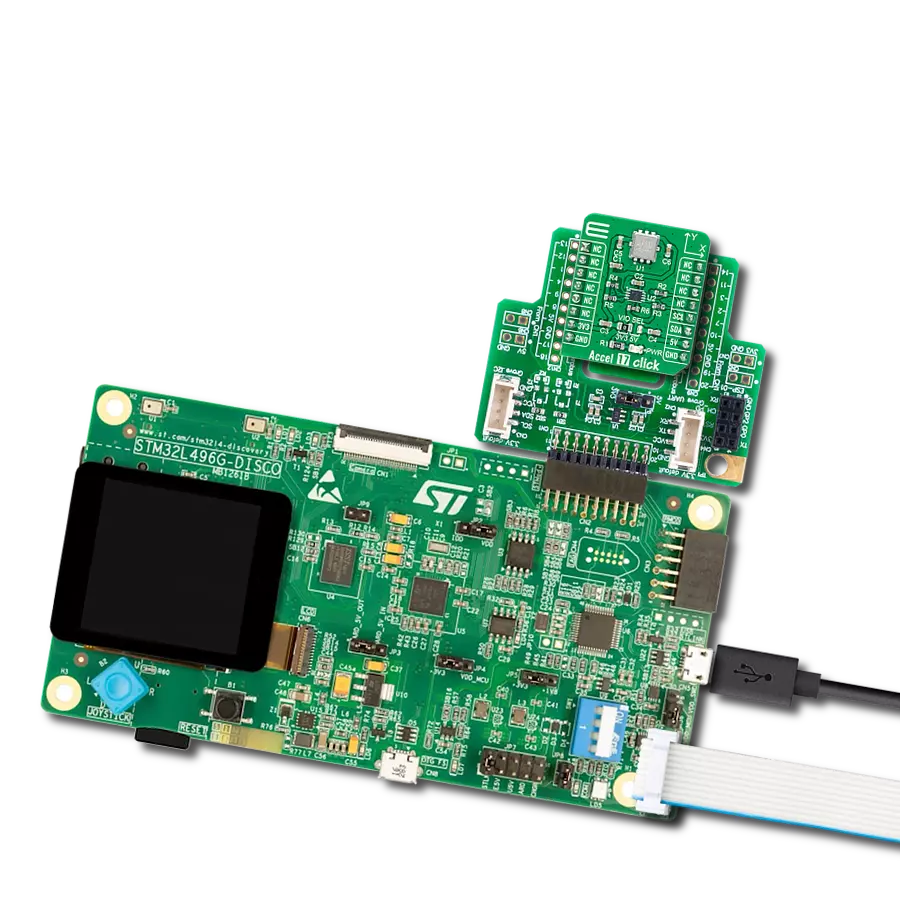
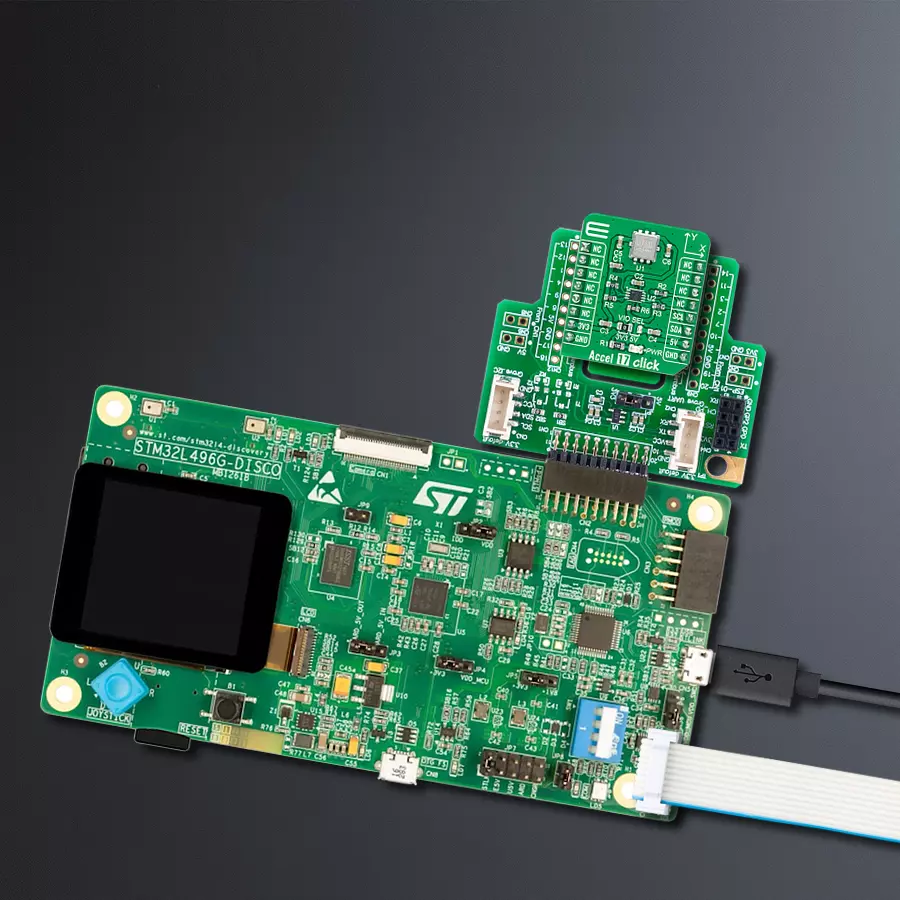
Accel 17 Click
Dev. board
Discovery kit with STM32L496AG MCU
Compiler
NECTO Studio
MCU
STM32L496AG
This solution is invaluable for measuring and analyzing changes in velocity and acceleration, providing essential data for a wide range of purposes
A
A
Hardware Overview
How does it work?
Accel 17 Click is based on the MXC62320MP, a complete dual-axis acceleration measurement system fabricated on a monolithic CMOS process from MEMSIC. The MXC62320MP operation is based on heat transfer by natural convection and operates like other accelerometers, except it is a gas in the MEMSIC sensor. It can measure dynamic acceleration (e.g., vibration) and static acceleration (e.g., gravity), with full-scale acceleration measurements ranging from ±2g. It also comes with embedded Power Up/Down and self-test function, resolution better than 1mg, and >50.000g shock survival rating. In addition to all
these features, it also has excellent temperature stability and low power consumption/low active current. This accelerometer can enter a Power-Down mode by writing a command [xxxxxxx1] into the accelerometer’s internal register, while a Wake-Up operation is performed when a command of [xxxxxxx0] is written into the same register. Note that the MXC62320MP needs about 75ms (typical) for Power-Up time. Accel 17 Click communicates with MCU using a standard I2C 2-Wire interface that supports 400kHz Fast Mode operation. Since the sensor for operation requires a 3.3V logic voltage level only, this Click board™
also features the PCA9306 voltage-level translator from Texas Instruments. The I2C interface bus lines are routed to the dual bidirectional voltage-level translator, allowing this Click board™ to work properly with both 3.3V and 5V MCUs. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VIO SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.


Features overview
Development board
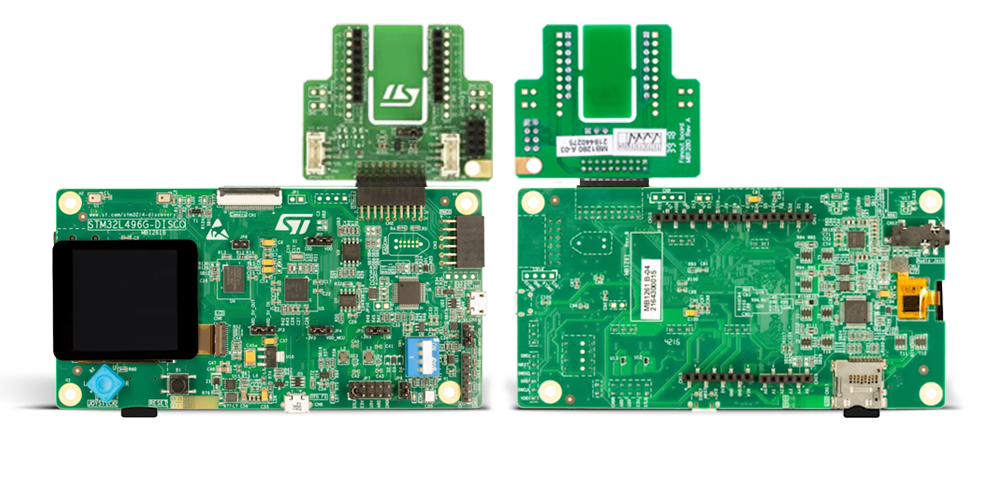
The 32L496GDISCOVERY Discovery kit serves as a comprehensive demonstration and development platform for the STM32L496AG microcontroller, featuring an Arm® Cortex®-M4 core. Designed for applications that demand a balance of high performance, advanced graphics, and ultra-low power consumption, this kit enables seamless prototyping for a wide range of embedded solutions. With its innovative energy-efficient
architecture, the STM32L496AG integrates extended RAM and the Chrom-ART Accelerator, enhancing graphics performance while maintaining low power consumption. This makes the kit particularly well-suited for applications involving audio processing, graphical user interfaces, and real-time data acquisition, where energy efficiency is a key requirement. For ease of development, the board includes an onboard ST-LINK/V2-1
debugger/programmer, providing a seamless out-of-the-box experience for loading, debugging, and testing applications without requiring additional hardware. The combination of low power features, enhanced memory capabilities, and built-in debugging tools makes the 32L496GDISCOVERY kit an ideal choice for prototyping advanced embedded systems with state-of-the-art energy efficiency.
Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
STMicroelectronics
Pin count
169
RAM (Bytes)
327680
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly
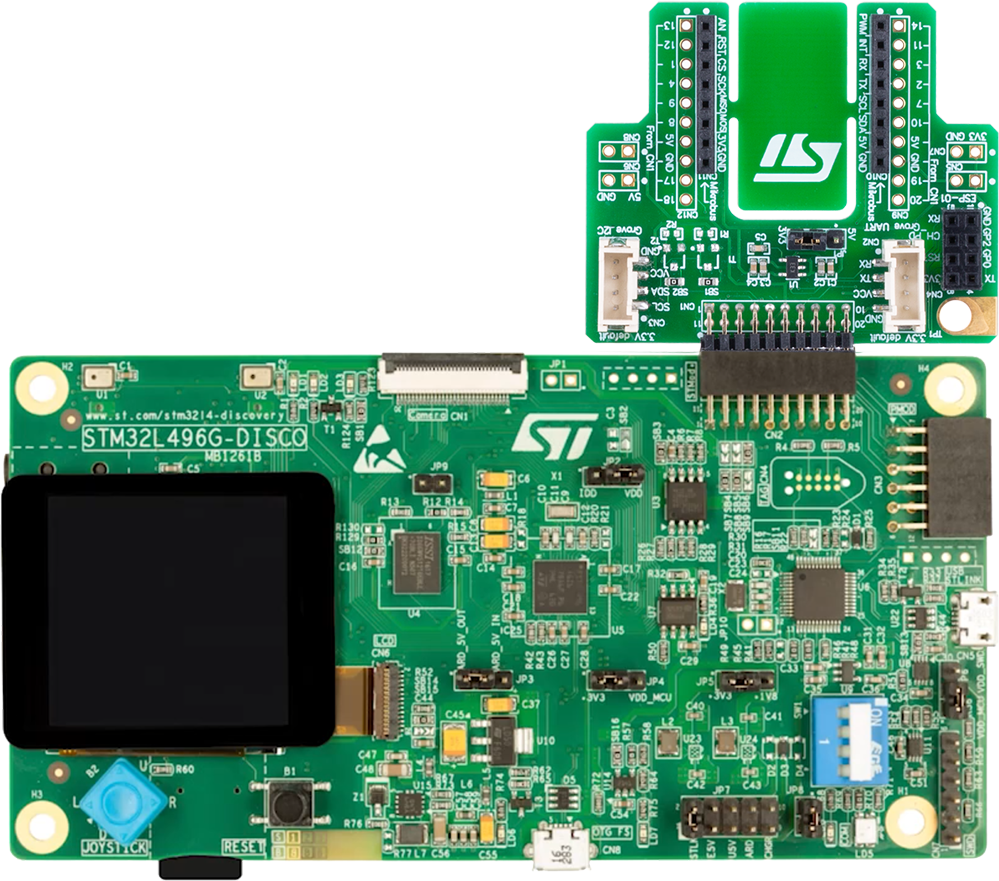
Start by selecting your development board and Click board™. Begin with the Discovery kit with STM32L496AG MCU as your development board.










Software Support
Library Description
This library contains API for Accel 17 Click driver.
Key functions:
accel17_get_axes_data- Accel data readingaccel17_generic_read- Reading functionaccel17_generic_write- Writing function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Accel17 Click example
*
* # Description
* This example showcases ability of the device to read
* x, y axis orientation.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of communication modules(I2C, UART), and
* configures device.
*
* ## Application Task
* Reads axis data and calculates it and logs result every 300ms.
*
* @author Luka Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "accel17.h"
static accel17_t accel17;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
accel17_cfg_t accel17_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
accel17_cfg_setup( &accel17_cfg );
ACCEL17_MAP_MIKROBUS( accel17_cfg, MIKROBUS_1 );
err_t init_flag = accel17_init( &accel17, &accel17_cfg );
if ( I2C_MASTER_ERROR == init_flag )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
accel17_default_cfg ( &accel17 );
Delay_ms ( 1000 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
accel17_axes_t axes;
accel17_get_axes_data ( &accel17, &axes );
log_printf( &logger, " > X[degree]: %.2f\r\n > Y[degree]: %.2f\r\n", axes.x, axes.y );
log_printf( &logger, "*********************************\r\n" );
Delay_ms ( 300 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion