Explore the captivating world of magnetism through the lens of HMC1512 and PIC32MZ2048EFH100
Beyond the spin

Published Sep 15, 2023
Click board™
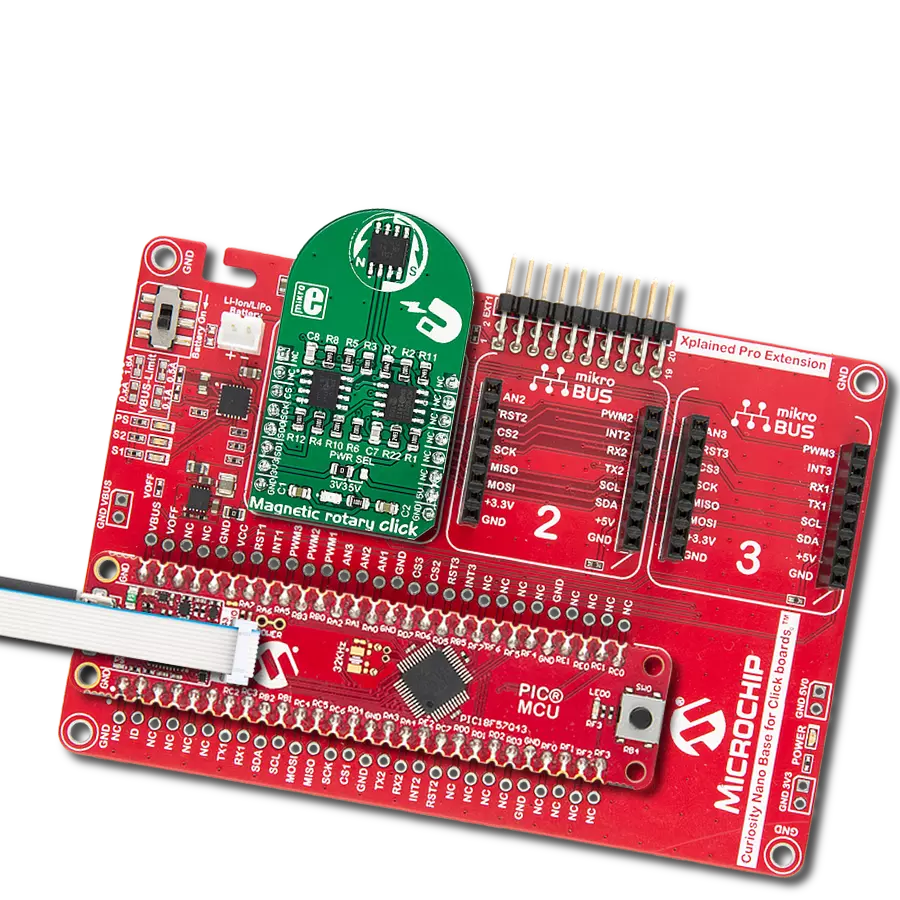
Magnetic rotary Click
Dev. board
Flip&Click PIC32MZ
Compiler
NECTO Studio
MCU
PIC32MZ2048EFH100
Learn how magnetic rotary sensors go beyond mere rotations, serving as indispensable tools for innovation, enabling advancements in navigation systems, medical devices, and more
A
A
Hardware Overview
How does it work?
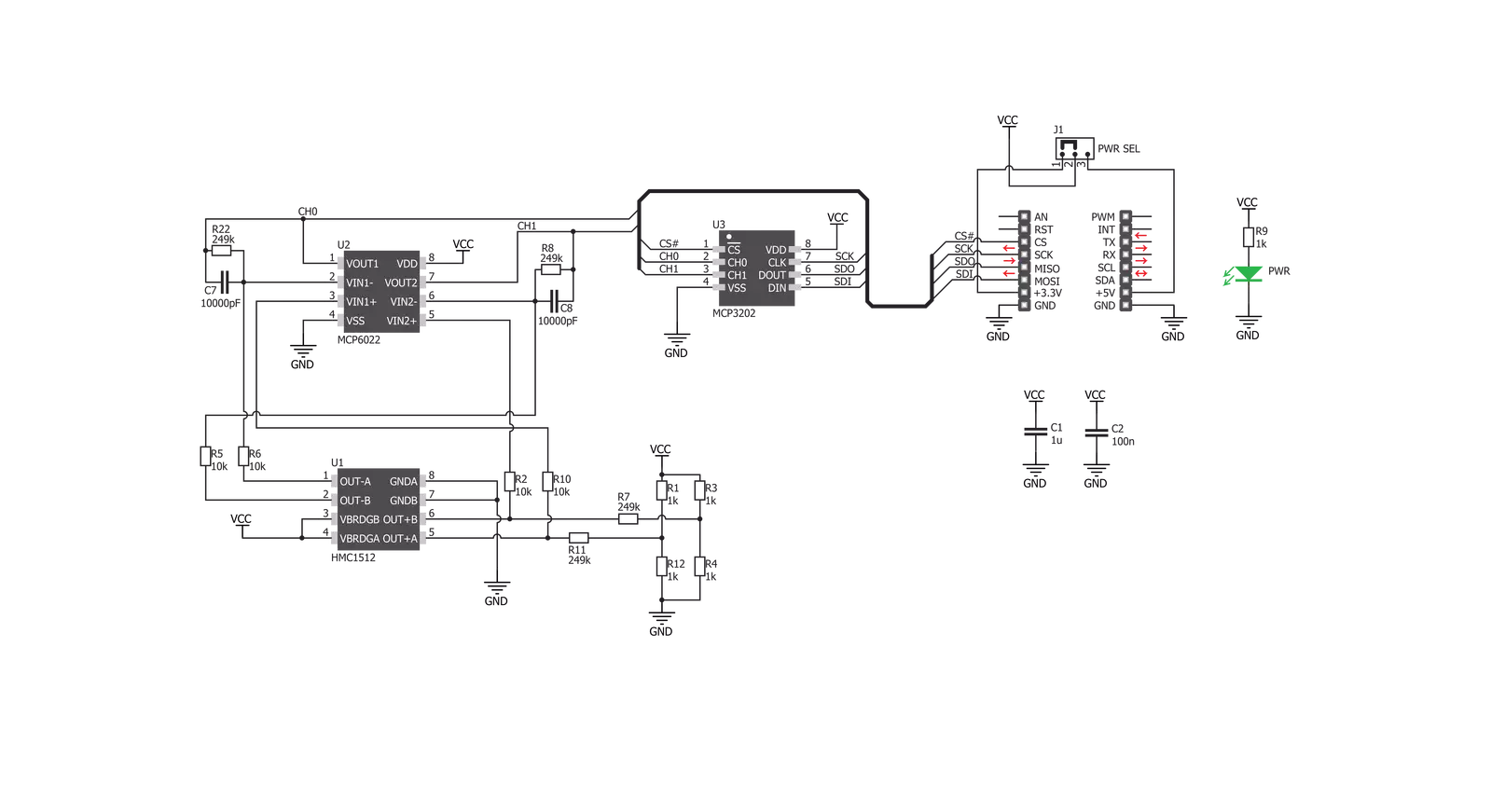
Magnetic rotary Click is based on the HMC1512, a magnetic displacement sensor, from Honeywell. The key feature of the HMC1512 IC is the high accuracy of the magnetic field sensing. Unlike most of the magnetic sensors on the market which rely on the Hall-effect, the integrated sensors of the HMC1512 IC are produced using the Honeywell proprietary Anisotropic Magneto-Resistive (AMR) technology, which yields an absolute magnetic field position sensing with the angular error of only 0.05° in the range of ±90°. The magneto-resistive sensing elements form a saturated-mode Wheatstone bridge, positioned in the XZ plane (parallel with the surface of the IC). The HMC1512 contains two such integrated bridges, bridge A, and bridge B. These bridges are positioned at the middle of the IC casing, which is the optimal position for rotary applications. One bridge is physically rotated by 45° from the other, allowing the HMC1512 IC to cover the full range of ±90° (2x45°), maintaining its sensing accuracy. The IC outputs an analog differential voltage with respect to the angle of the magnetic field. The
voltage from the selected mikroBUS™ power rail is directly applied to the internal Wheatstone bridge of the HMC1512. By construction, in the absence of the magnetic field, its outputs will be set at half the supply voltage (with the small offset of 3mV/V typically). If there is a magnetic field positioned at 0° in respect to one of the bridges, it will cause no disbalance of the magneto-resistive elements for that bridge. However, in the other bridge, the same magnetic field will cause it to reach its peak output value, since that bridge is rotated by 45°. The outputs of the Wheatstone bridges are routed to the dual operational amplifier, which serves as the buffer for the A/D converter. As a dual operational amplifier, the MCP6022 from Microchip is used. This op-amp is biased to half the power supply voltage and has a gain of 25. Two buffered signals are then used as inputs for each channel of the A/D converter. Magnetic rotary click uses the MCP3202, a two-channel, 12-bit A/D converter (ADC) with SPI Interface, by Microchip. This ADC has a high resolution which can be used even for more demanding applications.
At 0°, the ADC will output half of its full-scale (FS) value, and it will swing towards 0 if the sign of the orientation of the magnetic field is positioned towards the negative direction, and 4095 if the orientation of the magnetic field is positioned towards the positive direction. Each bridge output is routed to a separate ADC input, so it can be independently converted. The MCP3202 uses the power supply as the reference voltage, allowing ADC conversion within the range of the input signal. Converted output values can be read via the SPI interface, routed to the mikroBUS™ SPI pins for easy interfacing with a vast number of different microcontrollers (MCUs). This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.


Features overview
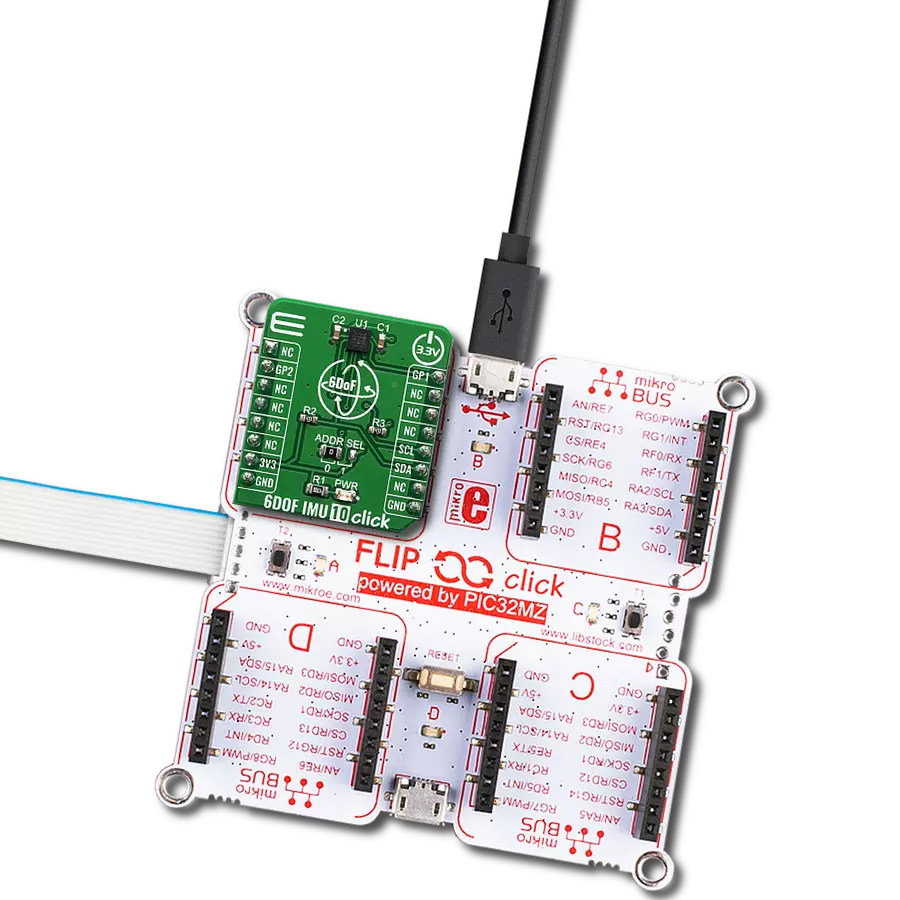
Development board
Flip&Click PIC32MZ is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller, the PIC32MZ2048EFH100 from Microchip, four mikroBUS™ sockets for Click board™ connectivity, two USB connectors, LED indicators, buttons, debugger/programmer connectors, and two headers compatible with Arduino-UNO pinout. Thanks to innovative manufacturing technology,
it allows you to build gadgets with unique functionalities and features quickly. Each part of the Flip&Click PIC32MZ development kit contains the components necessary for the most efficient operation of the same board. In addition, there is the possibility of choosing the Flip&Click PIC32MZ programming method, using the chipKIT bootloader (Arduino-style development environment) or our USB HID bootloader using mikroC, mikroBasic, and mikroPascal for PIC32. This kit includes a clean and regulated power supply block through the USB Type-C (USB-C) connector. All communication
methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, user-configurable buttons, and LED indicators. Flip&Click PIC32MZ development kit allows you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Flip&Click PIC32MZ as your development board.













Software Support
Library Description
This library contains API for Magnetic rotary Click driver.
Key functions:
magnrotary_read_adc- This function returns a 12bit result of AD conversionmagnrotary_out_volt_adc- This function returns ADC voltage value calculated to millivolts, depending on the voltage selectionmagnrotary_get_field_angle- This function returns a magnetic field angle calculated to degrees,from -90 to 90 degrees.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief MagneticRotary Click example
*
* # Description
* On every 500 miliseconds reads a magnetic field angle calculated to degrees for channel A
* in Single-Ended Mode and logs results on uart terminal.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes peripherals, pins, SPI interface for communication with the device.
*
* ## Application Task
* Reads a magnetic field angle calculated to degrees for channel A
* in Single-Ended Mode and logs results on uart terminal.
* Repeats operation every 500 milliseconds.
* Note : The angle can be measured in the range from -90 to 90 degrees.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "magneticrotary.h"
// ------------------------------------------------------------------ VARIABLES
static magneticrotary_t magneticrotary;
static log_t logger;
static double magn_angle;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
magneticrotary_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
magneticrotary_cfg_setup( &cfg );
MAGNETICROTARY_MAP_MIKROBUS( cfg, MIKROBUS_1 );
magneticrotary_init( &magneticrotary, &cfg );
log_info(&logger, "Magnetic rotary successufully initialized!\r\n");
}
void application_task ( void )
{
// Task implementation.
magn_angle = magnrotary_get_field_angle(
&magneticrotary, MAGNROTARY_CHA_POS_GND_NEG |
MAGNROTARY_MSB_ZEROS_ORDER );
log_printf( &logger, "Angle: %.2lf \r\n ", magn_angle );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Magnetic