Measure how much electrical current is flowing through a circuit with INA196 and PIC32MZ2048EFM100
Current sensing has never been this electrifying!

Published Jan 31, 2024
Click board™
Current Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Achieve precise current measurements (from 2mA up to 2Amps) by sensing voltage drops across the added shunt resistor
A
A
Hardware Overview
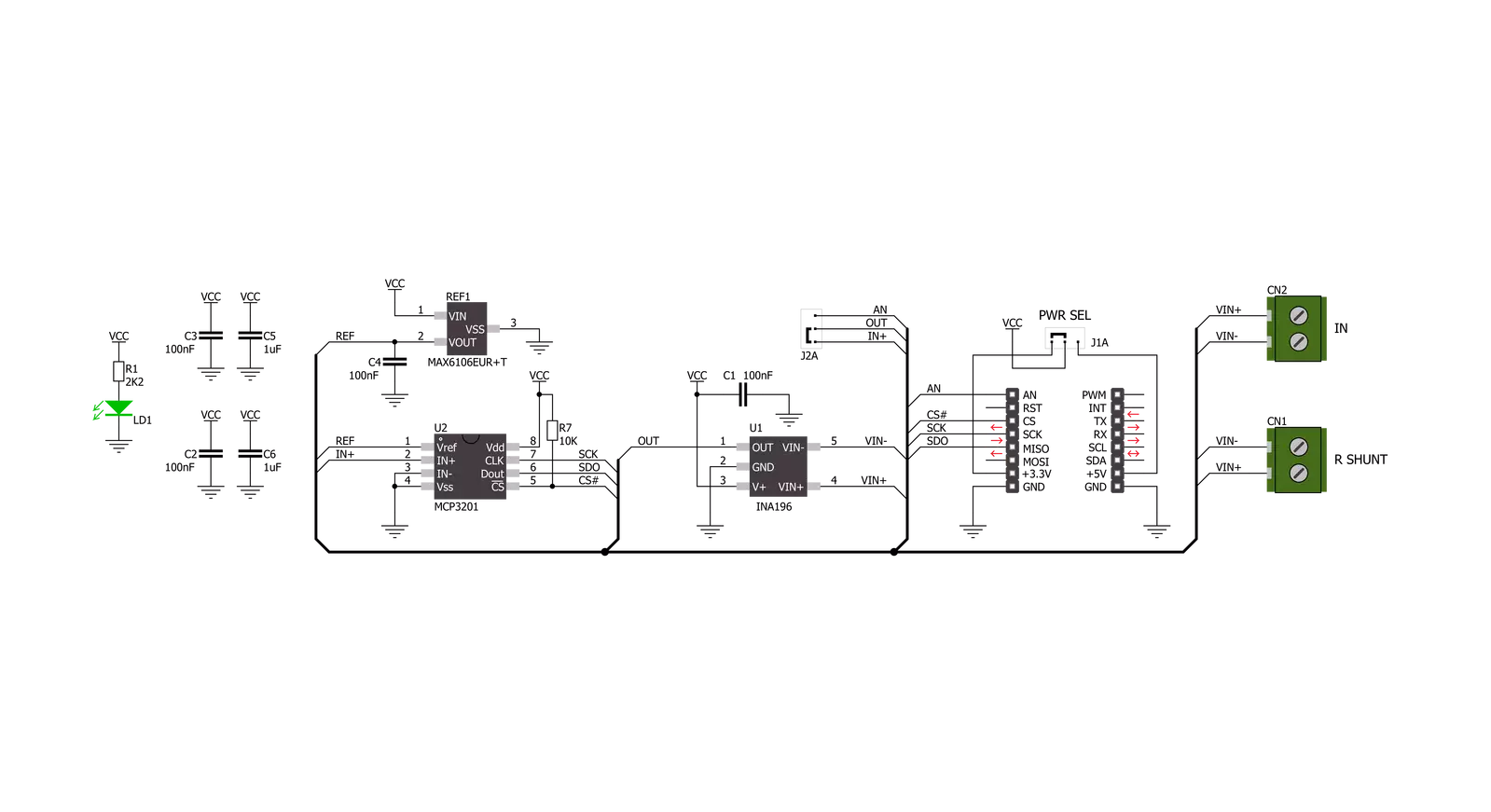
How does it work?
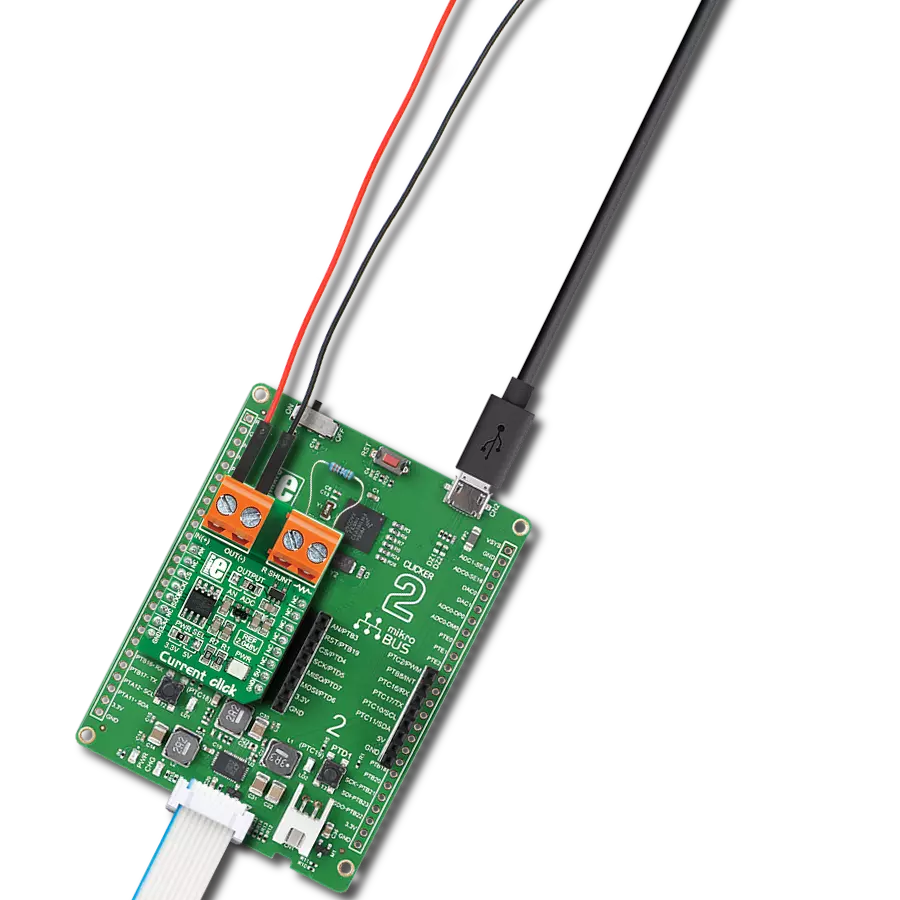
Current Click is based on the INA196, a current shunt monitor from Texas Instruments. The INA196 has a voltage output that can sense drops across shunts at common-mode voltages from −16V to +80V, independent of its supply voltage. It is also characterized by a gain of 20V/V and 500kHz bandwidth, simplifying current control loops' use across a vast temperature range, making it suitable for many consumer, enterprise, telecom, and automotive applications. This Click board™ measures current values in various bands. The board receives current from the output circuit connected to IN(+) and OUT(-) pins of the first
screw terminal, where the INA196 converts this current into a voltage, while the second screw terminal is used for the external shunt connection. Users need to provide the shunt of the appropriate value allowing the measurement up to 2048mA, based on the reference voltage set by MAX6106. Therefore, four shunts with different values are provided in the package (0.05, 0.2, 1, and 10Ω). The output signal of the INA196 can be converted to a digital value using MCP3201, a successive approximation A/D converter with a 12-bit resolution from Microchip using a 3-wire SPI compatible interface, or can be sent directly
to an analog pin of the mikroBUS™ socket labeled as AN. Selection can be performed by onboard SMD jumper labeled as OUTPUT, placing it in an appropriate position marked as AN or ADC. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWRSEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.














Software Support
Library Description
This library contains API for Current Click driver.
Key functions:
current_get_current_data- This function calculates the current in mA
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Current Click example
*
* # Description
* This is an example that shows the capabilities of the Current Click board
* by measuring current in miliampers. Current Click board can be used to safely
* measure DC current in the range of 2-2048mA depending on shunt resistor.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initalizes SPI, LOG and Click drivers.
*
* ## Application Task
* Measures DC current and displays the results on USB UART each second.
*
* @note
* Shunt resistor used in the example covers 4 default values (0.05 Ohm, 0.2 Ohm, 1 Ohm, 10 Ohm).
* To operate in linear range of INA196 check table bellow for shunt selection.
* |------------------------------------|
* | Rshunt | Imin [mA] | Imax [mA] |
* |------------------------------------|
* | 0.05 | 400 | 2048 |
* | 0.2 | 100 | 512 |
* | 1 | 20 | 102 |
* | 10 | 2 | 10 |
* --------------------------------------
*
* \author Jovan Stajkovic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "current.h"
// ------------------------------------------------------------------ VARIABLES
static current_t current;
static log_t logger;
static float curr;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
current_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
current_cfg_setup( &cfg );
CURRENT_MAP_MIKROBUS( cfg, MIKROBUS_1 );
current_init( ¤t, &cfg );
log_printf( &logger, "-----------------------\r\n" );
log_printf( &logger, " Current Click \r\n" );
log_printf( &logger, "-----------------------\r\n" );
}
void application_task ( void )
{
curr = current_get_current_data( ¤t, CURRENT_RSHUNT_0_05 );
if ( curr == CURRENT_OUT_OF_RANGE )
{
log_printf( &logger, "Out of range!\r\n" );
}
else
{
log_printf( &logger, " Current: %.2f mA\r\n", curr );
}
log_printf( &logger, "-----------------------\r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Current sensor