Upgrade current measurements to unprecedented levels of accuracy with MCS1806 and PIC32MZ2048EFM100
Hall effect innovation for seamless AC/DC current detection

Published Nov 15, 2023
Click board™
Hall Current 18 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Step into a new era of current measurement reliability with our Hall effect sensors, designed to meet the demands of modern industries by providing non-intrusive, high-precision monitoring for both AC and DC currents.
A
A
Hardware Overview
How does it work?
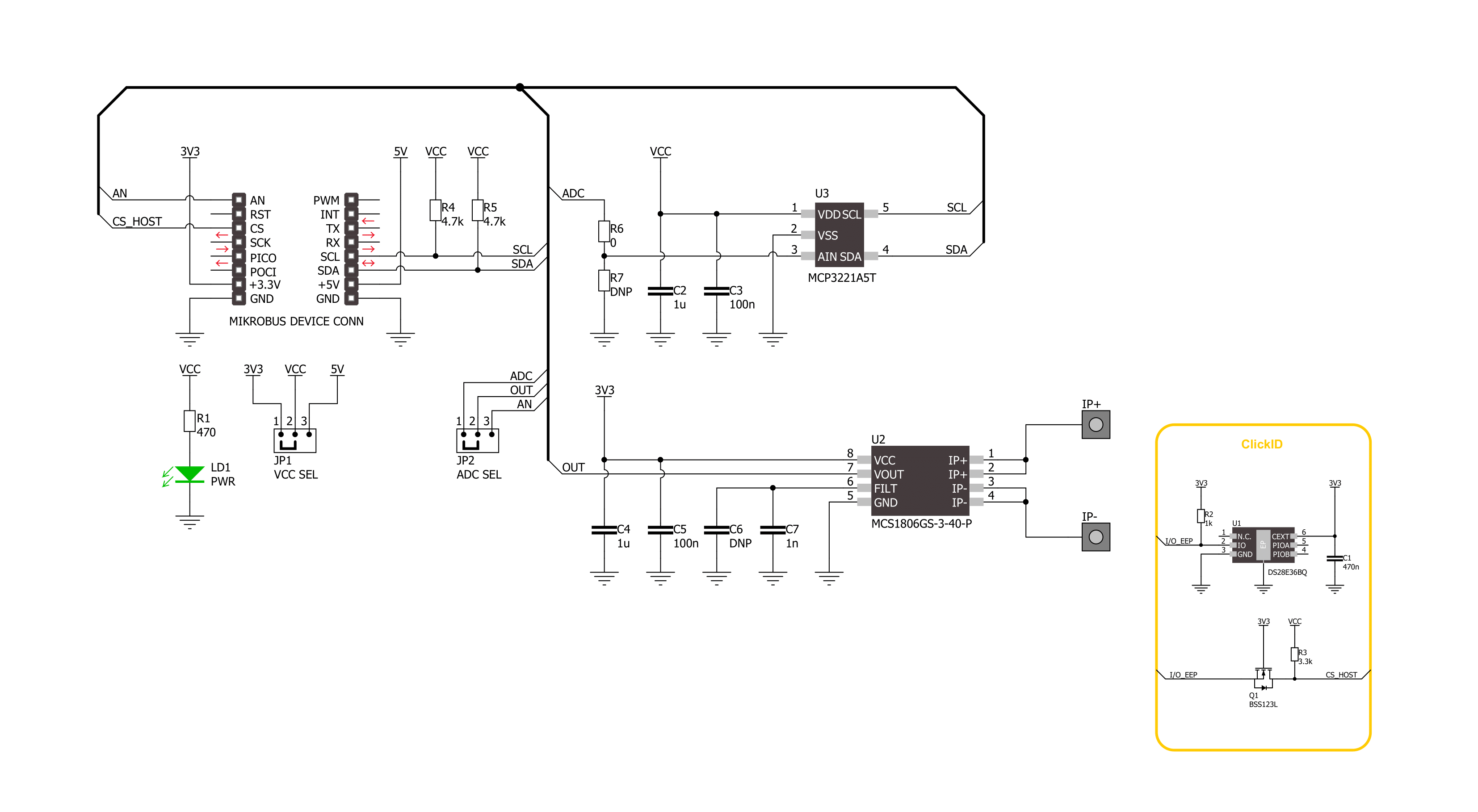
Hall Current 18 Click is based on the MCS1806, an isolated Hall-effect current sensor from MPS. Its primary conductor has low resistance and allows current to flow close to the high-accuracy Hall-effect sensors. The current generates a magnetic field that is sensed at two different points by the integrated Hall-effect transducers. The difference in the magnetic field between those two points is converted into a voltage proportional to the applied current. As a low stable offset, a spinning current technique is used. The MCS1806 outputs an analog signal, which on this board™ can be read in a digital form. For that purpose, Hall Current 18 Click features the MCP3221, a successive
approximation A/D converter with a 12-bit resolution from Microchip. The onboard OUT SEL jumper allows you to choose between the analog and digital output of the sensor. The MCP3221 is selected by default. This Click board™ should be connected in series with the load. Two onboard terminal connectors measure the current, one terminal block for the positive and the other for the negative current input. Hall Current 18 Click can use an analog output to allow the host MCU to read the data as analog values. In addition, over the MCP3221 and standard 2-Wire I2C interface, it can allow the host MCU to read data in a digital form and 12-bit resolution. Data can be transferred at
rates of up to 100kbit/s in the Standard and 400kbit/s in the Fast Mode. Also, maximum sample rates of 22.3kSPS with the MCP3221 are possible in a Continuous-Conversion Mode with a clock rate of 400kHz. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
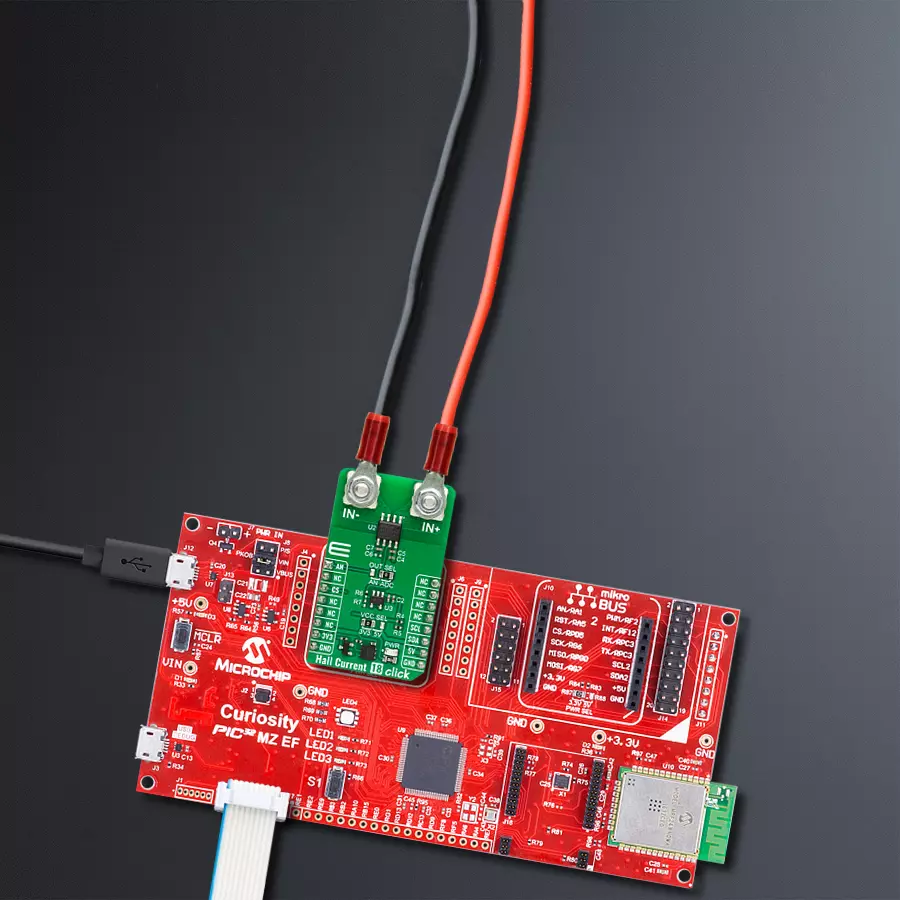
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for Hall Current 18 Click driver.
Key functions:
hallcurrent18_read_current- Hall Current 18 read current function.hallcurrent18_read_voltage- Hall Current 18 read voltage level function.allcurrent18_read_raw_adc- Hall Current 18 read raw ADC value function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Hall Current 18 Click Example.
*
* # Description
* This example demonstrates the use of Hall Current 18 Click board™
* by reading and displaying the current measurements.
*
* The demo application is composed of two sections :
*
* ## Application Init
* The initialization of SPI module and log UART.
* After driver initialization, the app sets the default configuration
* and set the zero voltage reference.
*
* ## Application Task
* The demo application reads the current measurements [A] and displays the results.
* Results are being sent to the UART Terminal, where you can track their changes.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "hallcurrent18.h"
static hallcurrent18_t hallcurrent18; /**< Hall Current 18 Click driver object. */
static log_t logger; /**< Logger object. */
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
hallcurrent18_cfg_t hallcurrent18_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
hallcurrent18_cfg_setup( &hallcurrent18_cfg );
HALLCURRENT18_MAP_MIKROBUS( hallcurrent18_cfg, MIKROBUS_1 );
err_t init_flag = hallcurrent18_init( &hallcurrent18, &hallcurrent18_cfg );
if ( ( ADC_ERROR == init_flag ) || ( I2C_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( HALLCURRENT18_ERROR == hallcurrent18_default_cfg ( &hallcurrent18 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
Delay_ms ( 100 );
log_printf( &logger, " Turn off the load current in the following 5 sec.\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
if ( HALLCURRENT18_OK == hallcurrent18_set_zero_ref( &hallcurrent18 ) )
{
log_printf( &logger, " Process complete!\r\n");
}
else
{
log_error( &logger, " Zero reference." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
Delay_ms ( 100 );
}
void application_task ( void )
{
float current = 0;
if ( HALLCURRENT18_OK == hallcurrent18_read_current ( &hallcurrent18, ¤t ) )
{
log_printf( &logger, " Current : %.2f [A]\r\n", current );
Delay_ms ( 1000 );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Current sensor