Experience the voltage step-down elegance with BMR4613001/001 and PIC18F57Q43
Synchronous step-down beast!

Published Feb 13, 2024
Click board™
Buck 14 Click
Dev. board
Curiosity Nano with PIC18F57Q43
Compiler
NECTO Studio
MCU
PIC18F57Q43
Through its ability to step down voltages with exceptional efficiency, our buck converter also contributes to a greener and more sustainable future by conserving energy resources
A
A
Hardware Overview
How does it work?
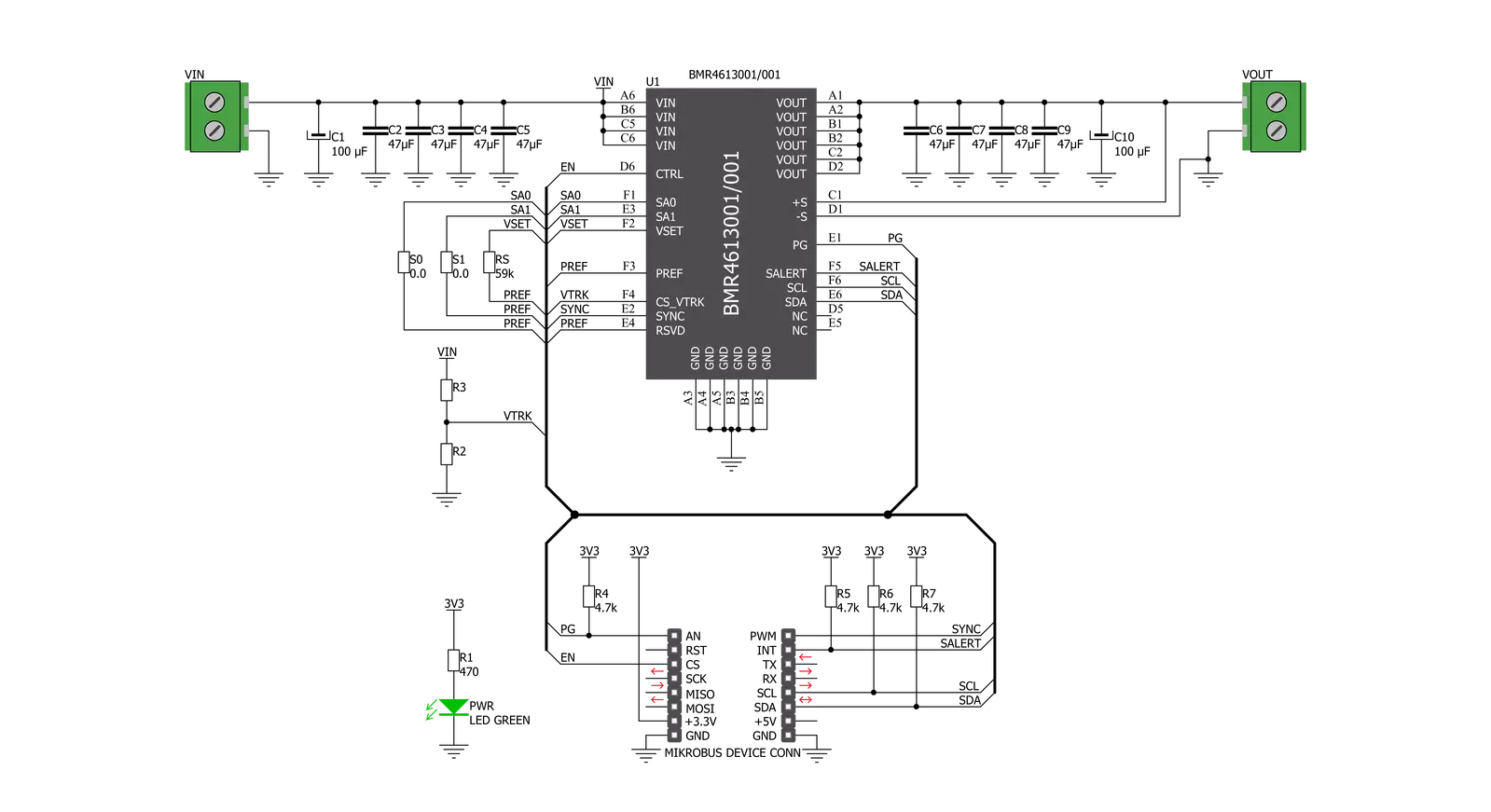
Buck 14 Click is based on the BMR4613001/001 - a PoL regulator from Flex that incorporates a wide range of readable and configurable power management features that are simple to implement with a minimum of external components. Additionally, it includes protection features that continuously safeguard the load from damage due to unexpected system faults. A fault is also shown as an alert on the ALR pin of the mikroBUS™ socket. The product is delivered with a default configuration suitable for various operations regarding input voltage, output voltage, and load. The configuration is stored in an internal Non-Volatile Memory (NVM). All power management functions can be reconfigured using the PMBus interface. It is possible to monitor various parameters through the PMBus interface. Fault conditions can be monitored using the
ALERT pin, which will be asserted when any pre-configured fault or warning conditions occur. The Buck 14 click supports tracking the output from a master voltage applied to the VTRK pin of BMR4613001/001. To select the tracking mode, a resistance ≤ 4.22 kΩ must be connected between the VSET and PREF pins (RS resistor). The tracking ratio is controlled by an internal feedback divider RDIV and an external resistive voltage divider (R3, R2, not populated on the board) placed from the supply being tracked to GND pins. Unlike PID-based digital power regulators, the product uses a state-space model-based algorithm valid for both the small- and large-signal response and accounts for duty-cycle saturation effects. This eliminates the need for users to determine and set thresholds for transitioning from linear to nonlinear modes. These capabilities result in a fast loop transient
response and the possibility of reducing the number of output capacitors. The product features a remote control input through the EN pin and a PMBus enable function by the command OPERATION to control the output voltage. It is also possible to configure the output to be always on. By default, the output is controlled by the EN pin only. The output voltage control can be reconfigured using the PMBus command ON_OFF_CONFIG. It is designed to operate in different thermal environments, and sufficient cooling must ensure reliable operation. Cooling is achieved mainly by conduction, from the pins to the host board, and convection, which depends on the product's airflow. Increased airflow enhances the cooling of the product.

Features overview
Development board
PIC18F57Q43 Curiosity Nano evaluation kit is a cutting-edge hardware platform designed to evaluate microcontrollers within the PIC18-Q43 family. Central to its design is the inclusion of the powerful PIC18F57Q43 microcontroller (MCU), offering advanced functionalities and robust performance. Key features of this evaluation kit include a yellow user LED and a responsive
mechanical user switch, providing seamless interaction and testing. The provision for a 32.768kHz crystal footprint ensures precision timing capabilities. With an onboard debugger boasting a green power and status LED, programming and debugging become intuitive and efficient. Further enhancing its utility is the Virtual serial port (CDC) and a debug GPIO channel (DGI
GPIO), offering extensive connectivity options. Powered via USB, this kit boasts an adjustable target voltage feature facilitated by the MIC5353 LDO regulator, ensuring stable operation with an output voltage ranging from 1.8V to 5.1V, with a maximum output current of 500mA, subject to ambient temperature and voltage constraints.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
48
RAM (Bytes)
8196
You complete me!
Accessories
Curiosity Nano Base for Click boards is a versatile hardware extension platform created to streamline the integration between Curiosity Nano kits and extension boards, tailored explicitly for the mikroBUS™-standardized Click boards and Xplained Pro extension boards. This innovative base board (shield) offers seamless connectivity and expansion possibilities, simplifying experimentation and development. Key features include USB power compatibility from the Curiosity Nano kit, alongside an alternative external power input option for enhanced flexibility. The onboard Li-Ion/LiPo charger and management circuit ensure smooth operation for battery-powered applications, simplifying usage and management. Moreover, the base incorporates a fixed 3.3V PSU dedicated to target and mikroBUS™ power rails, alongside a fixed 5.0V boost converter catering to 5V power rails of mikroBUS™ sockets, providing stable power delivery for various connected devices.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity Nano with PIC18F57Q43 as your development board.















Software Support
Library Description
This library contains API for Buck 14 Click driver.
Key functions:
buck14_power_ctrl- This function sets state of the power control pinbuck14_salert- This function gets manufacturer IDbuc14_write_vout- This function sets output voltage
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Buck14 Click example
*
* # Description
* This app enables usage of high-efficiency step-down converter.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Configure device.
*
* ## Application Task
* Sends 4 different commands for VOUT in span of 8sec
*
* *note:*
* When you send data you should send LSB first.
* Device input V should be beetween 4.5 - 14 V.
* Device output V could be from 0.5 - 5 V deepending from limits you set currently it is set to 1V.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "buck14.h"
// ------------------------------------------------------------------ VARIABLES
static buck14_t buck14;
static log_t logger;
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
void error_handler ( uint8_t stat_data )
{
if ( stat_data == BUCK14_ERROR )
{
log_printf( &logger, "ERROR! \r\n " );
for ( ; ; );
}
else if ( stat_data == BUCK14_ID_ERROR )
{
log_printf( &logger, "ID ERROR! \r\n " );
for ( ; ; );
}
else if ( stat_data == BUCK14_CMD_ERROR )
{
log_printf( &logger, "CMD ERROR! \r\n " );
}
}
void read_vout_data ( buck14_t *ctx )
{
uint16_t temp_data;
temp_data = buc14_read_vout( &buck14 );
log_printf( &logger, "VOUT ~ %u mV \r\n", temp_data );
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
buck14_cfg_t cfg;
uint8_t write_data;
uint8_t status_data;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
buck14_cfg_setup( &cfg );
BUCK14_MAP_MIKROBUS( cfg, MIKROBUS_1 );
buck14_init( &buck14, &cfg );
buck14_reset( &buck14 );
write_data = BUCK14_CTRL_ENABLE_NO_MARGIN;
buck14_generic_write( &buck14, BUCK14_CMD_OPERATION, &write_data , 1 );
Delay_ms ( 300 );
status_data = buck14_check_mfr_id( &buck14 );
error_handler( status_data );
log_printf( &logger, "-Device ID OK!\r\n" );
buck14_power_ctrl( &buck14, BUCK14_PIN_STATE_HIGH );
buck14_default_cfg( &buck14 );
log_printf( &logger, " ***** App init ***** \r\n" );
log_printf( &logger, "----------------------\r\n" );
Delay_ms ( 100 );
}
void application_task ( void )
{
uint8_t status_data;
float vout_value;
vout_value = 1.2;
status_data = buc14_write_vout( &buck14, vout_value );
error_handler( status_data );
if ( status_data == BUCK14_SUCCESSFUL )
{
read_vout_data( &buck14 );
}
// 8 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
vout_value = 3.7;
status_data = buc14_write_vout( &buck14, vout_value );
error_handler( status_data );
if ( status_data == BUCK14_SUCCESSFUL )
{
read_vout_data( &buck14 );
}
// 8 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
vout_value = 2.5;
status_data = buc14_write_vout( &buck14, vout_value );
error_handler( status_data );
if ( status_data == BUCK14_SUCCESSFUL )
{
read_vout_data( &buck14 );
}
// 8 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
vout_value = 4.5;
status_data = buc14_write_vout( &buck14, vout_value );
error_handler( status_data );
if ( status_data == BUCK14_SUCCESSFUL )
{
read_vout_data( &buck14 );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "```````````````\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Buck