Experience the future of IR data exchange with TFDU4101, MCP2120 and ATmega328
Send and receive Infrared (IR) serial data

Published Feb 14, 2024
Click board™
IrDA2 Click
Dev. board
Arduino UNO Rev3
Compiler
NECTO Studio
MCU
ATmega328
Achieve fast and stable infrared data communication, covering a more than 1m range and speeds up to 115.2 kbit/s
A
A
Hardware Overview
How does it work?
IrDA 2 Click is based on the MCP2120, a high-performance fully-static infrared encoder/decoder from Microchip for sending and receiving IR serial data from the infrared transceiver module, the TFDU4101 from Vishay semiconductor. This way, the MCP2120 adds IR capability to any embedded application with serial data. The data from a standard UART is encoded (modulated) and output as electrical pulses to the IR Transceiver. Besides, the IR Transceiver also receives and outputs electrical pulses, which the MCP2120 decodes (demodulates) and transmits by the UART interface. The latest IrDAR physical layer standard performs this modulation and demodulation method for fast infrared data communication, supporting IrDA speeds up to 115.2kbit/s. Integrated within the TFDU4101 transceiver module is a photo pin diode, an infrared emitter (IRED), and a low-power control
IC to provide a total front-end solution in a single package. This Click board™ covers the full IrDA range of more than 1m and can be turned on or off through the EN pin routed to the CS pin of the mikroBUS™ socket; hence, offering a switch operation to turn ON/OFF power delivery to the MCP2120. The MCP2120 will encode and decode serial data at the selected data or baud rate. The selection can be made by positioning SMD jumpers labeled as BR SEL in an appropriate position marked as 1 or 0. Also, the software baud rate selection is selected if all these jumpers are in a high (1) position. For any other inputs, the hardware select mode is active. This setting is latched when the MCP2120 is reset from the RST pin of the mikroBUS™ socket. After an MCP2120 reset, changing the value of the baud pins does not affect the device’s baud rate. Software baud data
rate is intended for use with systems where switching data rates must be performed frequently between the MCP2120 and the embedded host. In software baud mode, the MCP2120 differentiates between data and commands. This feature is controlled via the MOD pin routed to the AN pin of the mikroBUS™ socket. The MOD pin is used to switch between command and data modes, and when the MOD pin is in a low state, the MCP2120 is in command mode; otherwise, the MCP2120 is in data mode. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Arduino UNO is a versatile microcontroller board built around the ATmega328P chip. It offers extensive connectivity options for various projects, featuring 14 digital input/output pins, six of which are PWM-capable, along with six analog inputs. Its core components include a 16MHz ceramic resonator, a USB connection, a power jack, an
ICSP header, and a reset button, providing everything necessary to power and program the board. The Uno is ready to go, whether connected to a computer via USB or powered by an AC-to-DC adapter or battery. As the first USB Arduino board, it serves as the benchmark for the Arduino platform, with "Uno" symbolizing its status as the
first in a series. This name choice, meaning "one" in Italian, commemorates the launch of Arduino Software (IDE) 1.0. Initially introduced alongside version 1.0 of the Arduino Software (IDE), the Uno has since become the foundational model for subsequent Arduino releases, embodying the platform's evolution.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
32
RAM (Bytes)
2048
You complete me!
Accessories
Click Shield for Arduino UNO has two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the Arduino UNO board without effort. The Arduino Uno, a microcontroller board based on the ATmega328P, provides an affordable and flexible way for users to try out new concepts and build prototypes with the ATmega328P microcontroller from various combinations of performance, power consumption, and features. The Arduino Uno has 14 digital input/output pins (of which six can be used as PWM outputs), six analog inputs, a 16 MHz ceramic resonator (CSTCE16M0V53-R0), a USB connection, a power jack, an ICSP header, and reset button. Most of the ATmega328P microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the Arduino UNO board with our Click Shield for Arduino UNO, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
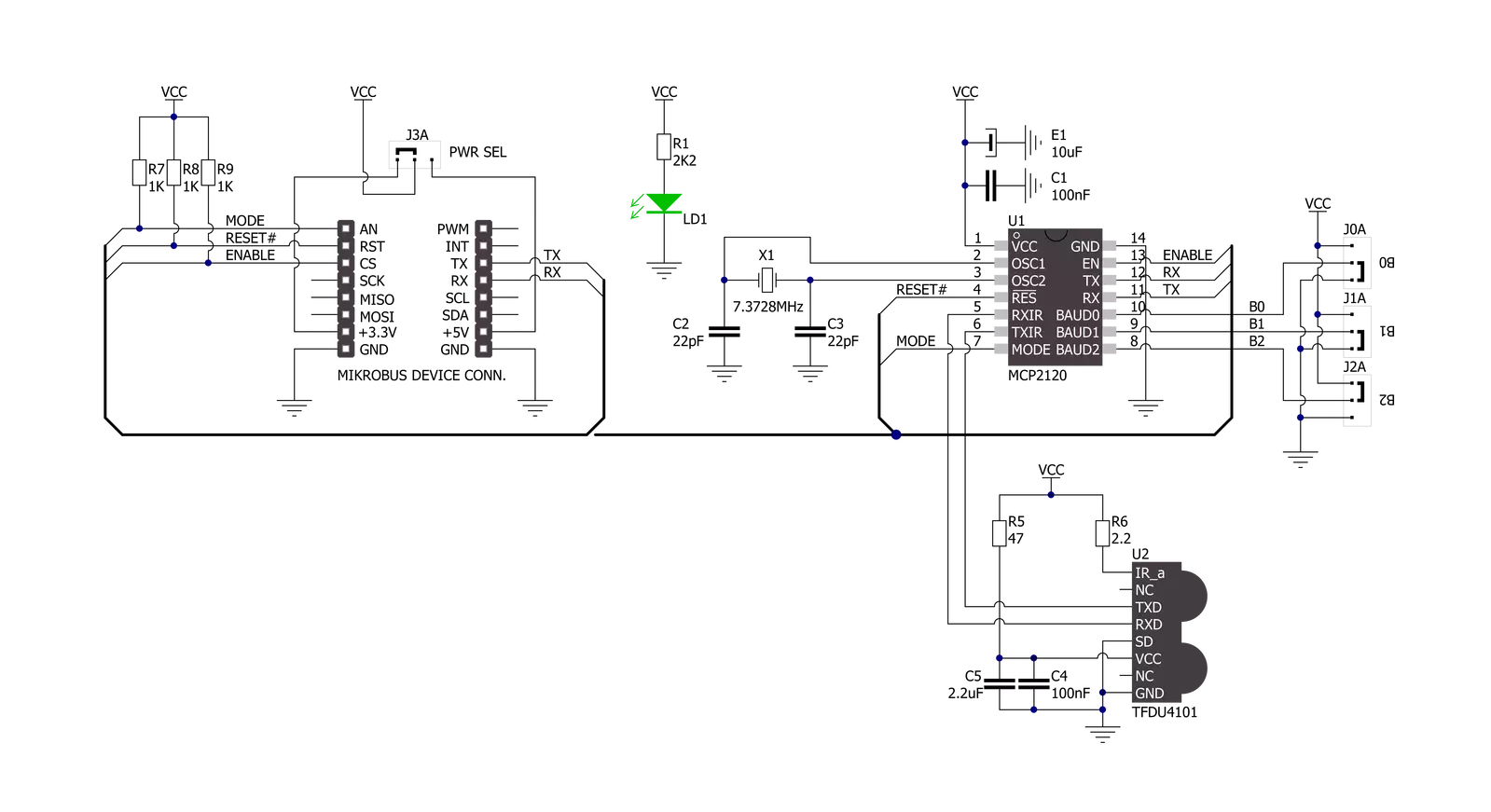
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Arduino UNO Rev3 as your development board.














Software Support
Library Description
This library contains API for IrDA 2 Click driver.
Key functions:
irda2_generic_write- This function writes a desired number of data bytes by using UART serial interfaceirda2_generic_read- This function reads a desired number of data bytes by using UART serial interfaceirda2_reset- This function executes a device reset operation
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief IrDA 2 Click Example.
*
* # Description
* This example demonstrates the use of an IrDA 2 Click board by showing
* the communication between the two Click boards.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initalizes device and makes an initial log.
*
* ## Application Task
* Depending on the selected application mode, it reads all the received data or
* sends the desired text message once per second.
*
* @author MikroE Team
*
*/
#include "board.h"
#include "log.h"
#include "irda2.h"
// Comment out the line below in order to switch the application mode to receiver
#define DEMO_APP_TRANSMITTER
// Text message to send in the transmitter application mode
#define DEMO_TEXT_MESSAGE "MIKROE - IrDA 2 Click board\r\n\0"
static irda2_t irda2;
static log_t logger;
void application_init ( void )
{
irda2_cfg_t irda2_cfg;
log_cfg_t logger_cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( logger_cfg );
log_init( &logger, &logger_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
irda2_cfg_setup( &irda2_cfg );
IRDA2_MAP_MIKROBUS( irda2_cfg, MIKROBUS_1 );
if ( UART_ERROR == irda2_init( &irda2, &irda2_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
irda2_default_cfg( &irda2 );
irda2_reset( &irda2 );
#ifdef DEMO_APP_TRANSMITTER
log_printf( &logger, " Application Mode: Transmitter\r\n" );
#else
log_printf( &logger, " Application Mode: Receiver\r\n" );
#endif
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
#ifdef DEMO_APP_TRANSMITTER
irda2_generic_write( &irda2, DEMO_TEXT_MESSAGE, strlen( DEMO_TEXT_MESSAGE ) );
log_printf( &logger, "%s", ( char * ) DEMO_TEXT_MESSAGE );
Delay_ms ( 1000 );
#else
uint8_t rx_byte = 0;
if ( 1 == irda2_generic_read( &irda2, &rx_byte, 1 ) )
{
log_printf( &logger, "%c", rx_byte );
}
#endif
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Optical