Harness the full potential of your DC motors with TB67H450AFNG and STM32F091RC
Elevate your motor's efficiency
Published Feb 26, 2024
Click board™
DC Motor 6 Click
Dev. board
Nucleo-64 with STM32F091RC MCU
Compiler
NECTO Studio
MCU
STM32F091RC
Upgrade your engineering solution and stay ahead of the curve. Operate your DC motor with up to 44V!
A
A
Hardware Overview
How does it work?
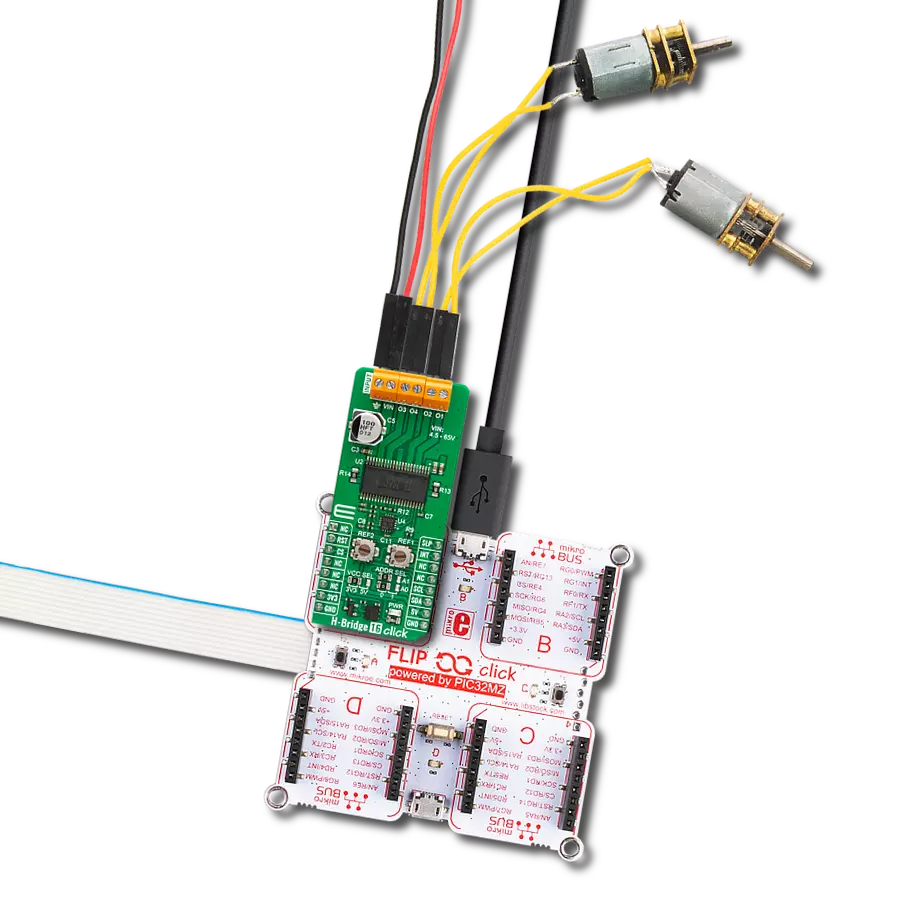
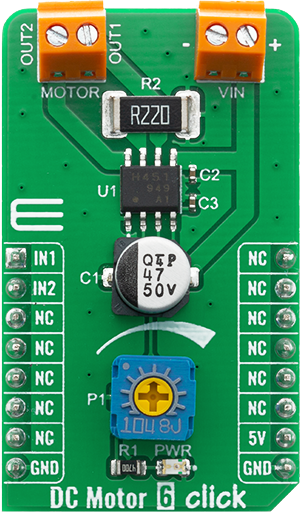
DC MOTOR 6 Click is based on the TB67H451AFNG, a PWM chopper-type brushed DC motor driver from Toshiba Semiconductor. This IC uses a proprietary BiCD manufacturing process, allowing this IC to be powered by a wide range of supply voltages, from 4.5 up to 44V. Due to the MOSFETs' very low ON resistance, the TB67H451AFNG can deliver up to 3A of current to the connected load. However, many external parameters affect both the maximum voltage and the current specifications, especially when the connected load is complex, such as the DC motor. In using TB67H451AFNG, the voltage should be applied to the pins of VM and VREF. The absolute maximum rating of VM supply voltage is 50V (no active). The usage range is 4.5 to 44V. The absolute maximum rating of VREF supply voltage is 5V. The usage range is 0 to 4V. There are no special procedures for inputting a power supply and shut down because the TB67H451AFNG
incorporates the under voltage lockout (UVLO). However, setting the motor operation to OFF is recommended under the unstable state of inputting the power supply (VM) and shutdown (transient area). After the power supply is stable, the motor should be operated by switching the input signal. The absolute maximum rating of motor output current is 3.5A. Its operating range is 3A or less. The maximum current of the actual usage is limited depending on the usage conditions (the ambient temperature, the wiring pattern of the board, the radiation path, and the exciting design). Configure the most appropriate current value after calculating the heat and evaluating the board under the operating environment. This IC controls a motor operation by PWM constant current control. The peak current value (setting current value) can be determined by the settings of the current-sensing resistor (R2) and the reference voltage (Vref).
When both IN1 and IN2 pins are set to L for 1 ms (typ.) or more, the operation mode enters the standby mode. When IN1 or IN2 is set to H, the mode returns from the standby mode and enters the operation mode. The TB67H451AFNG not only can be controlled by constant current PWM but also by direct PWM; with IN control signals. When the supply voltage to the VM pin is 3.8V or less, the internal circuit is triggered; the internal reset circuit then turns off the output transistors. Once the UVLO is triggered, it can be cleared by reasserting the VM supply voltage to 4.0V or more. This Click board™ can only be operated with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Nucleo-64 with STM32F091RC MCU offers a cost-effective and adaptable platform for developers to explore new ideas and prototype their designs. This board harnesses the versatility of the STM32 microcontroller, enabling users to select the optimal balance of performance and power consumption for their projects. It accommodates the STM32 microcontroller in the LQFP64 package and includes essential components such as a user LED, which doubles as an ARDUINO® signal, alongside user and reset push-buttons, and a 32.768kHz crystal oscillator for precise timing operations. Designed with expansion and flexibility in mind, the Nucleo-64 board features an ARDUINO® Uno V3 expansion connector and ST morpho extension pin
headers, granting complete access to the STM32's I/Os for comprehensive project integration. Power supply options are adaptable, supporting ST-LINK USB VBUS or external power sources, ensuring adaptability in various development environments. The board also has an on-board ST-LINK debugger/programmer with USB re-enumeration capability, simplifying the programming and debugging process. Moreover, the board is designed to simplify advanced development with its external SMPS for efficient Vcore logic supply, support for USB Device full speed or USB SNK/UFP full speed, and built-in cryptographic features, enhancing both the power efficiency and security of projects. Additional connectivity is
provided through dedicated connectors for external SMPS experimentation, a USB connector for the ST-LINK, and a MIPI® debug connector, expanding the possibilities for hardware interfacing and experimentation. Developers will find extensive support through comprehensive free software libraries and examples, courtesy of the STM32Cube MCU Package. This, combined with compatibility with a wide array of Integrated Development Environments (IDEs), including IAR Embedded Workbench®, MDK-ARM, and STM32CubeIDE, ensures a smooth and efficient development experience, allowing users to fully leverage the capabilities of the Nucleo-64 board in their projects.

Microcontroller Overview
MCU Card / MCU
Architecture
ARM Cortex-M0
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
64
RAM (Bytes)
32768
You complete me!
Accessories
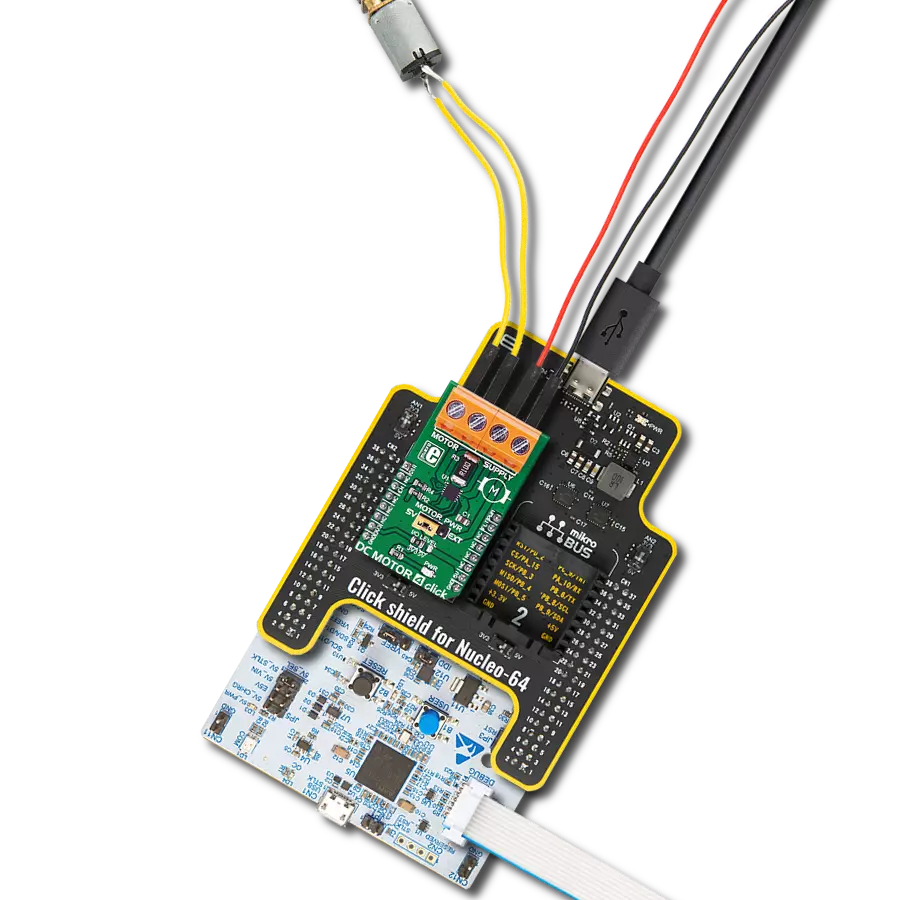
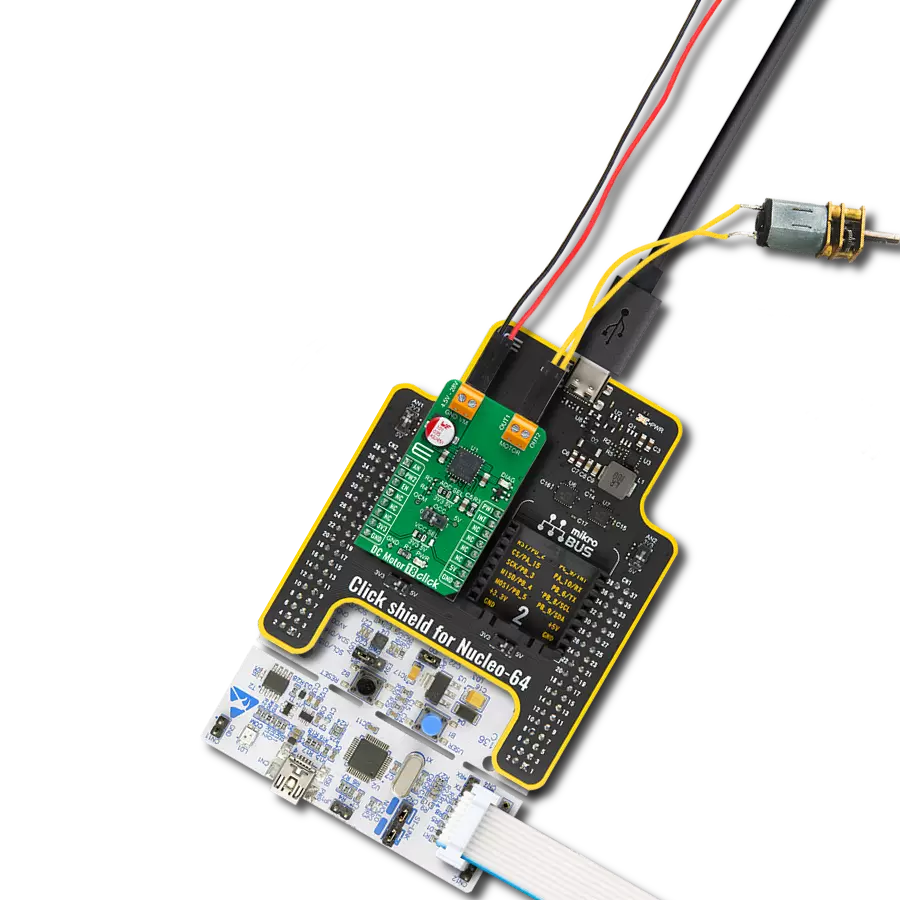
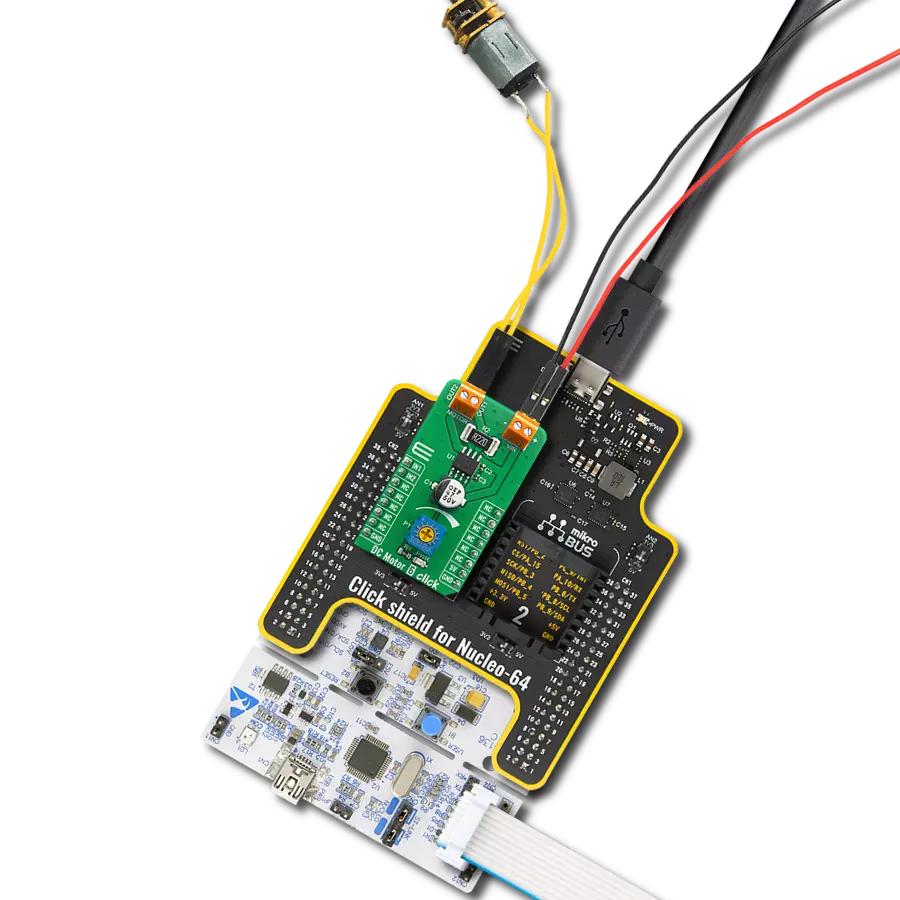
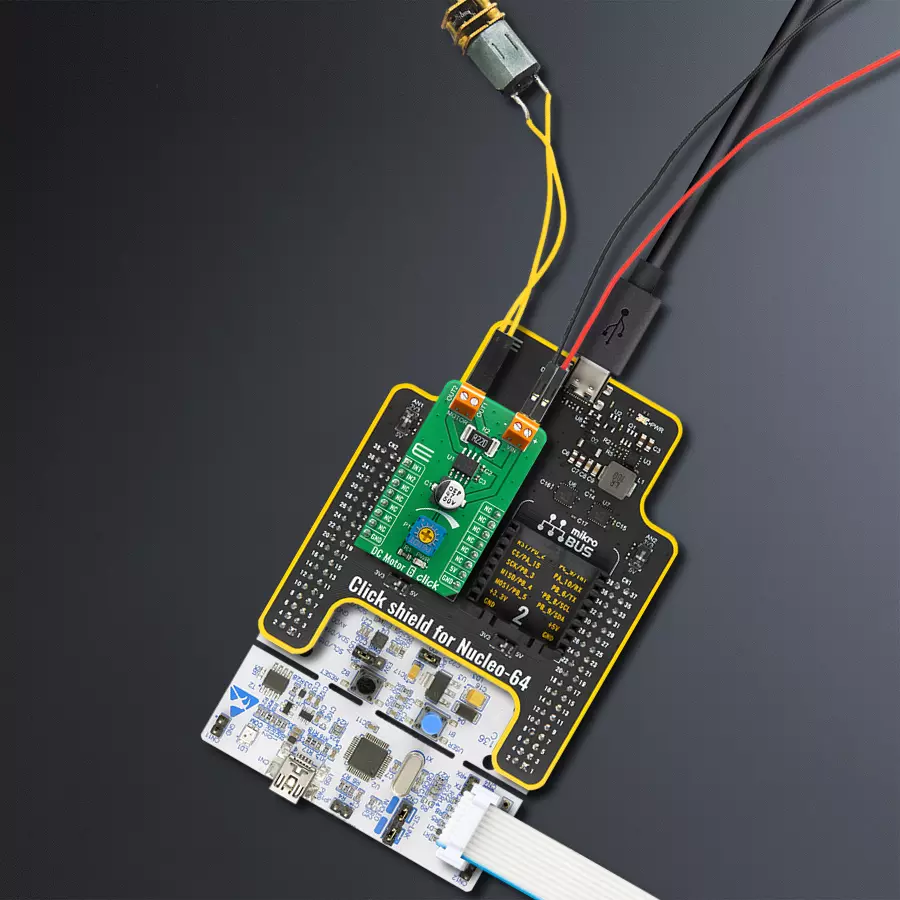
Click Shield for Nucleo-64 comes equipped with two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the STM32 Nucleo-64 board with no effort. This way, Mikroe allows its users to add any functionality from our ever-growing range of Click boards™, such as WiFi, GSM, GPS, Bluetooth, ZigBee, environmental sensors, LEDs, speech recognition, motor control, movement sensors, and many more. More than 1537 Click boards™, which can be stacked and integrated, are at your disposal. The STM32 Nucleo-64 boards are based on the microcontrollers in 64-pin packages, a 32-bit MCU with an ARM Cortex M4 processor operating at 84MHz, 512Kb Flash, and 96KB SRAM, divided into two regions where the top section represents the ST-Link/V2 debugger and programmer while the bottom section of the board is an actual development board. These boards are controlled and powered conveniently through a USB connection to program and efficiently debug the Nucleo-64 board out of the box, with an additional USB cable connected to the USB mini port on the board. Most of the STM32 microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the STM32 Nucleo-64 board with our Click Shield for Nucleo-64, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

DC Gear Motor - 430RPM (3-6V) represents an all-in-one combination of a motor and gearbox, where the addition of gear leads to a reduction of motor speed while increasing the torque output. This gear motor has a spur gearbox, making it a highly reliable solution for applications with lower torque and speed requirements. The most critical parameters for gear motors are speed, torque, and efficiency, which are, in this case, 520RPM with no load and 430RPM at maximum efficiency, alongside a current of 60mA and a torque of 50g.cm. Rated for a 3-6V operational voltage range and clockwise/counterclockwise rotation direction, this motor represents an excellent solution for many functions initially performed by brushed DC motors in robotics, medical equipment, electric door locks, and much more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
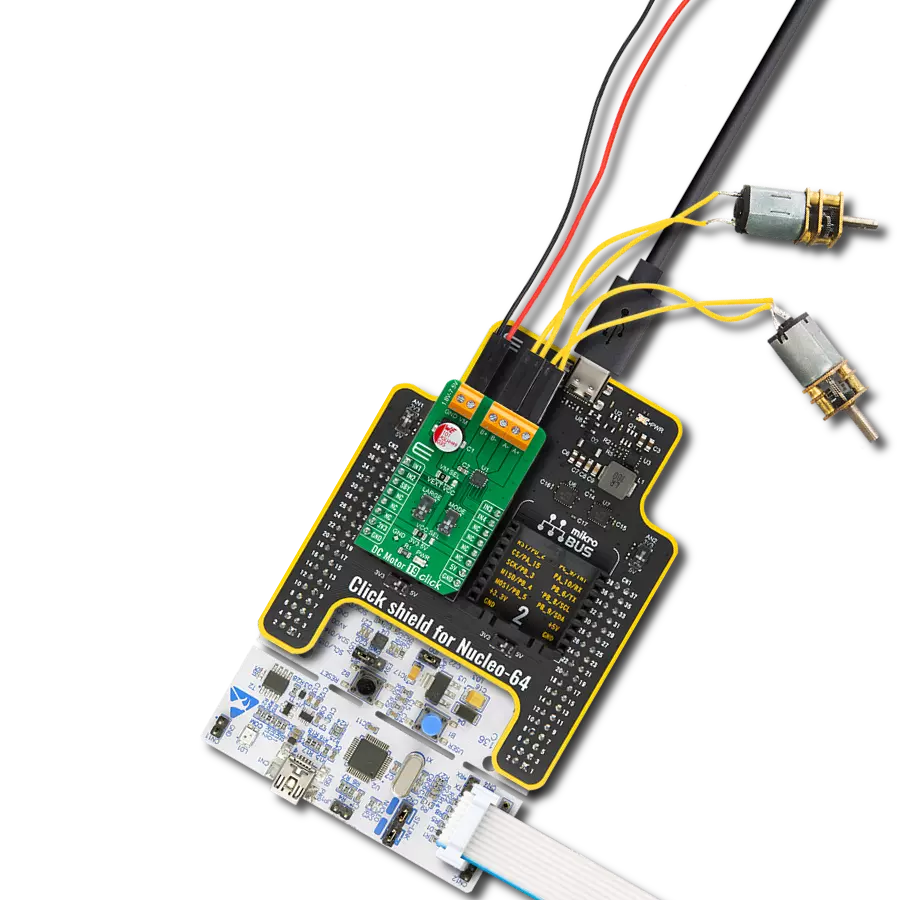
Project assembly
Start by selecting your development board and Click board™. Begin with the Nucleo-64 with STM32F091RC MCU as your development board.













Software Support
Library Description
This library contains API for DC Motor 6 Click driver.
Key functions:
void dcmotor6_set_direction( uint8_t dir )- Set motor Direction
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief DC Motor 6 Click example
*
* # Description
* This example demonstrates the use of DC Motor 6 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and makes an initial log.
*
* ## Application Task
* Drives the motor in the forward direction for 5 seconds, then pulls brake for 2 seconds,
* and after that drives it in the reverse direction for 5 seconds, and finally,
* disconnects the motor for 2 seconds. Each step will be logged on the USB UART where
* you can track the program flow.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "dcmotor6.h"
// ------------------------------------------------------------------ VARIABLES
static dcmotor6_t dcmotor6;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
dcmotor6_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info(&logger, "---- Application Init ----");
// Click initialization.
dcmotor6_cfg_setup( &cfg );
DCMOTOR6_MAP_MIKROBUS( cfg, MIKROBUS_1 );
dcmotor6_init( &dcmotor6, &cfg );
}
void application_task ( void )
{
log_printf( &logger, "The motor turns forward! \r\n" );
dcmotor6_set_direction( &dcmotor6, DCMOTOR6_MOTOR_FORWARD );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "Pull brake! \r\n" );
dcmotor6_set_direction( &dcmotor6, DCMOTOR6_MOTOR_BRAKE );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "The motor turns in reverse! \r\n" );
dcmotor6_set_direction( &dcmotor6, DCMOTOR6_MOTOR_REVERSE );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "The motor is disconnected (High-Z)! \r\n" );
dcmotor6_set_direction( &dcmotor6, DCMOTOR6_MOTOR_STOP );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushed