Achieve high-fidelity motion tracking with ICM-45686 and PIC32MX470F512H
Ultra-precise and stable 6-axis motion sensing solution for advanced applications

Published May 01, 2025
Click board™
6DOF IMU 27 Click
Dev. board
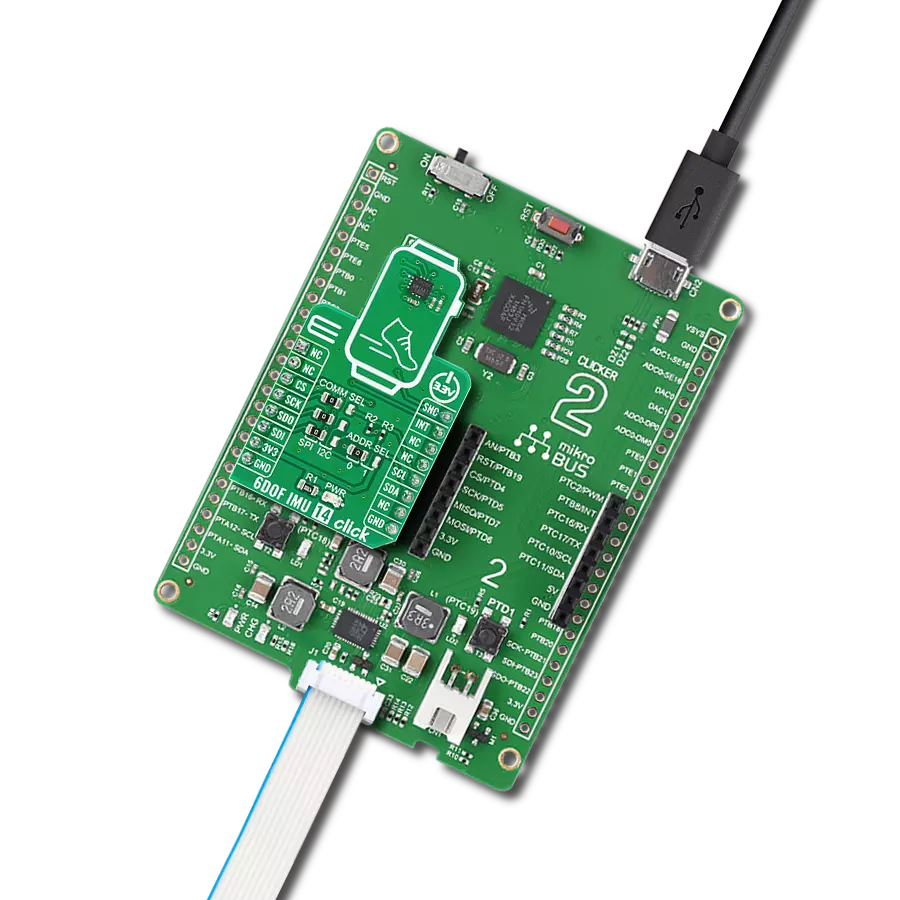
6LoWPAN clicker
Compiler
NECTO Studio
MCU
PIC32MX470F512H
Capture precise and stable 6-axis motion data with ultra-low noise and advanced processing
A
A
Hardware Overview
How does it work?
6DOF IMU 27 Click is based on the ICM-45686, a MEMS MotionTracking device from TDK InvenSense that integrates a 3-axis gyroscope and a 3-axis accelerometer in a single package. This high-performance motion tracking add-on board designed to provide accurate and reliable 6-axis motion sensing for a wide range of modern applications. The sensor is made with a dual interface architecture, combining both UI and AUX communication paths, allowing for exceptional flexibility in data acquisition. The ICM-45686 supports multiple host interfaces, including I3C, I2C, and SPI, ensuring compatibility with a variety of host MCUs. Thanks to its compact form factor and advanced features, 6DOF IMU 27 Click is an ideal solution for use in head-mounted displays, augmented and virtual reality (AR/VR) controllers, wearable technology, and various IoT-based systems that demand accurate motion tracking and robust sensor performance. The ICM-45686 is specifically designed to deliver superior performance in terms of precision and stability. It provides ultra-low noise levels for both gyroscope and accelerometer sensors, setting a new standard in its class. Its robust architecture ensures outstanding thermal stability, resistance to mechanical shocks up to 20,000g, and immunity to disturbances caused by PCB bending or out-of-band vibration noise. The sensor includes an 8Kbyte FIFO buffer, enabling efficient data management with a configurable Output Data Rate (ODR) and FIFO Data Rate (FDR), which makes it suitable for both high-speed and low-power
applications. One of the standout features of the ICM-45686 is the embedded APEX Motion Processing engine developed by InvenSense, which provides powerful onboard motion processing capabilities. Complemented by programmable digital filters and an integrated temperature sensor, this device ensures optimal performance even in challenging operating conditions. The gyroscope integrated into the ICM-45686 supports a total of eight full-scale range configurations, ranging from ±15.625 degrees per second (dps) up to ±4000dps, independently programmable for both the UI and AUX data paths. Similarly, the accelerometer offers four full-scale range options from ±2g to ±32g, also independently configurable for both paths. This Click board™ is designed in a unique format supporting the newly introduced MIKROE feature called "Click Snap." Unlike the standardized version of Click boards, this feature allows the main sensor area to become movable by breaking the PCB, opening up many new possibilities for implementation. Thanks to the Snap feature, the ICM-45686 can operate autonomously by accessing its signals directly on the pins marked 1-8. Additionally, the Snap part includes a specified and fixed screw hole position, enabling users to secure the Snap board in their desired location. This board supports communication with the host MCU through either SPI (maximum clock frequency of 24MHz) or I2C (maximum clock frequency of 1MHz) interfaces, with I2C being the default option. The communication interface is selected by adjusting
the COMM SEL jumper to the desired position. To enhance flexibility, particularly with the detachable Snap section of the Click Snap format, an additional COMM SEL jumpers are available. These jumpers functions the same as the COMM SEL, allowing for independent communication interface selection when the Snap section is used independently. To ensure proper functionality, all COMM jumpers must be set to the same interface. For those using the I2C interface, the board also provides an ADDR SEL jumper, enabling users to configure the I2C address as needed for their specific application. As mentioned, in addition to the interface pins, the board includes two configurable interrupt pins, IT1 and IT2, which triggers the host MCU whenever an interrupt event occurs, such as gesture recognition, activity classification, and pedometer because of an on-chip APEX (Advanced Pedometer and Event Detection – neXt gen) Motion Processing engine. Additionally, the board offers unsoldered AUX pins that provide access to the AUX interface, which can operate either in SPI slave mode - suitable for connecting to Optical Image Stabilization (OIS) controllers - or in I2C master mode for interfacing with external sensors. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. It also comes equipped with a library containing functions and example code that can be used as a reference for further development.

Features overview
Development board
6LoWPAN Clicker is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC microcontroller, the PIC32MX470F512H from Microchip, a USB connector, LED indicators, buttons, a mikroProg connector, and a header for interfacing with external electronics. Along with this microcontroller, the board also contains a 2.4GHz ISM band transceiver, allowing you to add wireless communication to your target application. Its compact design provides a fluid and immersive working experience, allowing access anywhere
and under any circumstances. Each part of the 6LoWPAN Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the 6LoWPAN Clicker programming method, using USB HID mikroBootloader, or through an external mikroProg connector for PIC, dsPIC, or PIC32 programmer, the Clicker board also includes a clean and regulated power supply module for the development kit. The USB Micro-B connection can provide up to 500mA of current for the Clicker board, which is more than enough to operate all onboard and additional modules, or it can power
over two standard AA batteries. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several buttons and LED indicators. 6LoWPAN Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
512
Silicon Vendor
Microchip
Pin count
64
RAM (Bytes)
131072
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the 6LoWPAN clicker as your development board.














Software Support
Library Description
6DOF IMU 27 Click demo application is developed using the NECTO Studio, ensuring compatibility with mikroSDK's open-source libraries and tools. Designed for plug-and-play implementation and testing, the demo is fully compatible with all development, starter, and mikromedia boards featuring a mikroBUS™ socket.
Example Description
This example demonstrates the use of 6DOF IMU 27 Click board by reading and displaying the accelerometer and gyroscope data (X, Y, and Z axis) as well as a temperature measurement in degrees Celsius.
Key functions:
c6dofimu27_cfg_setup- This function initializes Click configuration structure to initial values.c6dofimu27_init- This function initializes all necessary pins and peripherals used for this Click board.c6dofimu27_default_cfg- This function executes a default configuration of 6DOF IMU 27 Click board.c6dofimu27_get_int1_pin- This function returns the INT1 pin logic state.c6dofimu27_read_data- This function reads the accelerometer, gyroscope, and temperature measurement data.
Application Init
Initializes the driver and performs the Click default configuration.
Application Task
Waits for a data ready indication and then reads the accelerometer, gyroscope, and temperature measurements. The results are displayed on the USB UART every 80ms as per the accel and gyro output data rate which is set to 12.5Hz.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief 6DOF IMU 27 Click example
*
* # Description
* This example demonstrates the use of 6DOF IMU 27 Click board by reading and displaying
* the accelerometer and gyroscope data (X, Y, and Z axis) as well as a temperature measurement
* in degrees Celsius.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Waits for a data ready indication and then reads the accelerometer, gyroscope, and temperature
* measurements. The results are displayed on the USB UART every 80ms as per the accel and gyro
* output data rate which is set to 12.5 Hz.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "c6dofimu27.h"
static c6dofimu27_t c6dofimu27;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
c6dofimu27_cfg_t c6dofimu27_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
c6dofimu27_cfg_setup( &c6dofimu27_cfg );
C6DOFIMU27_MAP_MIKROBUS( c6dofimu27_cfg, MIKROBUS_1 );
err_t init_flag = c6dofimu27_init( &c6dofimu27, &c6dofimu27_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( C6DOFIMU27_ERROR == c6dofimu27_default_cfg ( &c6dofimu27 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
static c6dofimu27_data_t meas_data;
if ( !c6dofimu27_get_int1_pin ( &c6dofimu27 ) )
{
if ( C6DOFIMU27_OK == c6dofimu27_read_data ( &c6dofimu27, &meas_data ) )
{
log_printf ( &logger, " Accel X: %.2f g\r\n", meas_data.accel.x );
log_printf ( &logger, " Accel Y: %.2f g\r\n", meas_data.accel.y );
log_printf ( &logger, " Accel Z: %.2f g\r\n", meas_data.accel.z );
log_printf ( &logger, " Gyro X: %.1f dps\r\n", meas_data.gyro.x );
log_printf ( &logger, " Gyro Y: %.1f dps\r\n", meas_data.gyro.y );
log_printf ( &logger, " Gyro Z: %.1f dps\r\n", meas_data.gyro.z );
log_printf ( &logger, " Temperature: %.2f C\r\n\n", meas_data.temperature );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion