Create a reliable tool to monitor, analyze, and manage currents using ACS70331 and MK64FN1M0VDC12
Your pathway to exquisite current measurements

Published Aug 11, 2023
Click board™
Hall Current 4 Click
Dev. board
Clicker 2 for Kinetis
Compiler
NECTO Studio
MCU
MK64FN1M0VDC12
Tap into efficient current use via our data-driven solution, leading to cost savings, productivity gains, and operational excellence
A
A
Hardware Overview
How does it work?
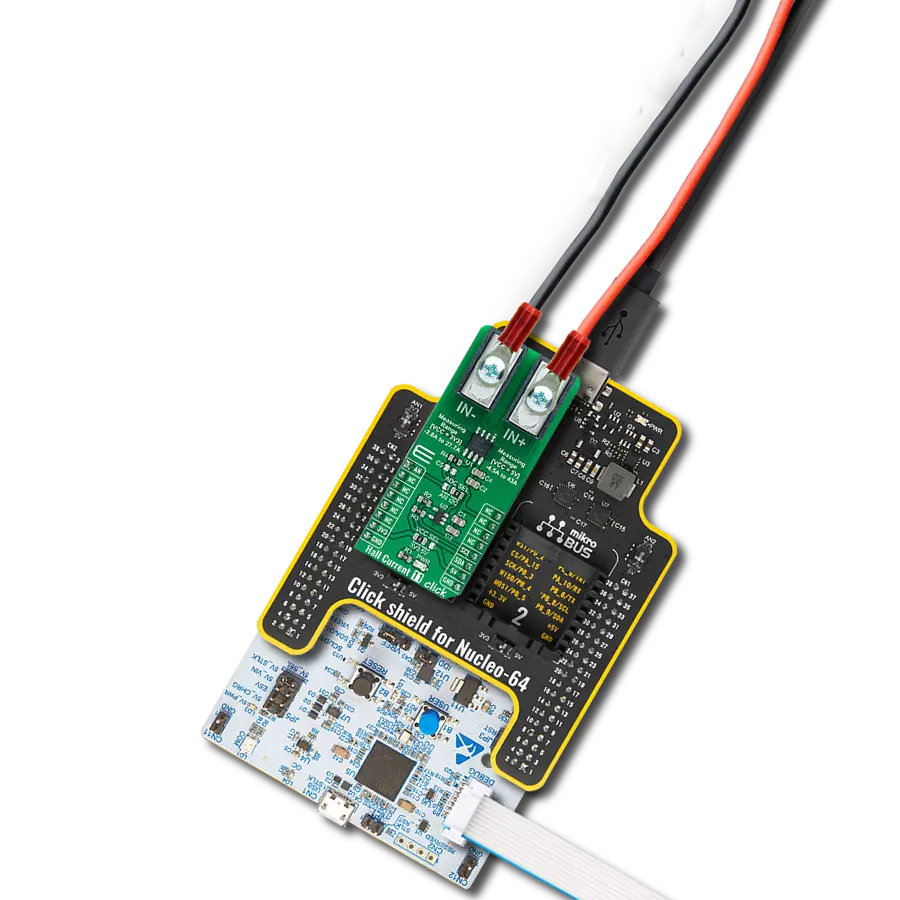
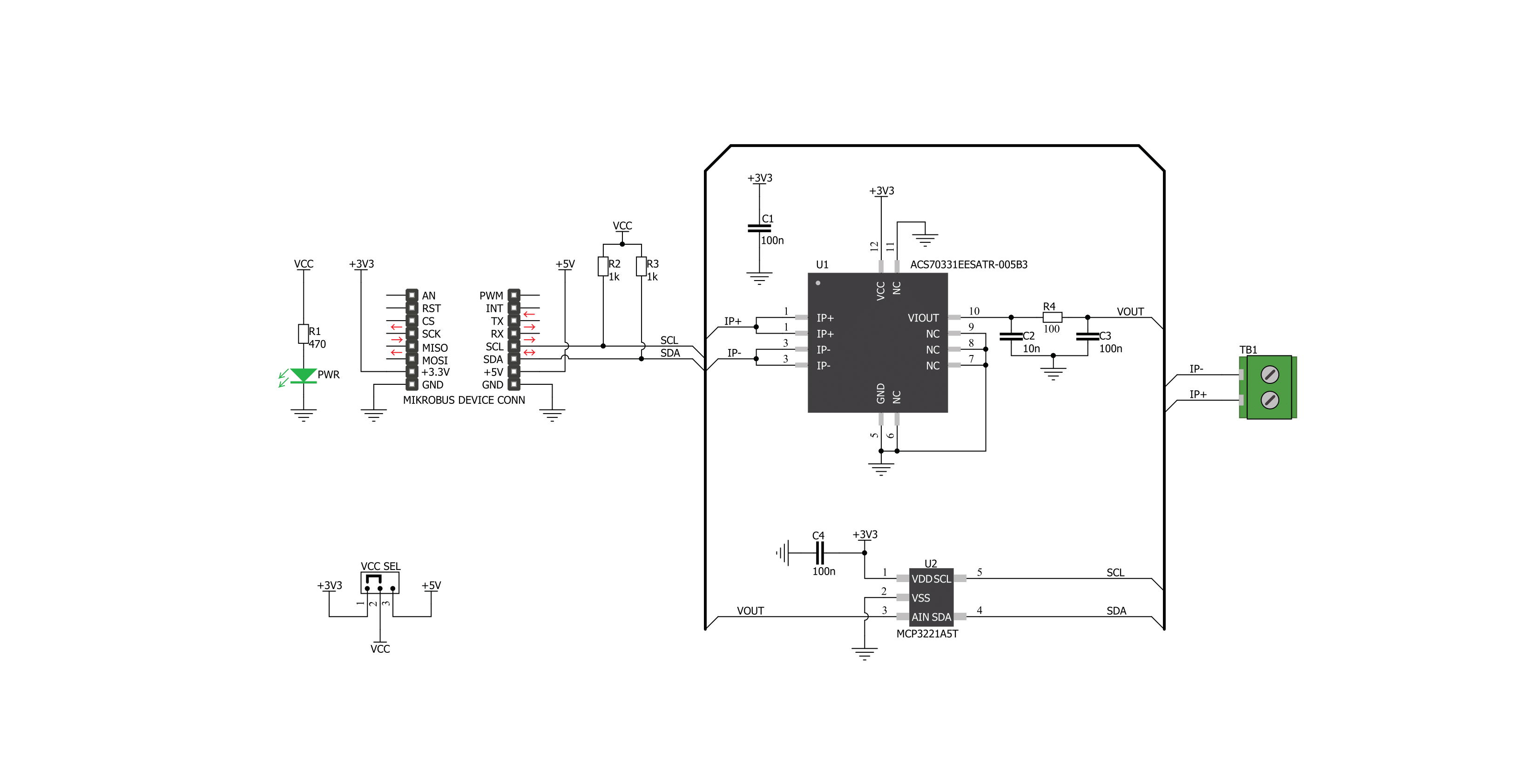
Hall Current 4 Click is based on the ACS70331, a current sensor from Allegro Microsystems, and the 12-bit ADC marked MCP3221, produced by Microchip. The ACS70331 uses GMR elements to indirectly measure the current flowing through the primary conductor of the IC by sensing the field produced by this current. This IC utilizes the field generated by the current passing through the primary conductor affects the voltage across the GMR sensor. The GMR sensor voltage changes even with a low field strength, which makes the ACS70331 very suitable for accurate
measurements of lower currents. However, the saturation happens quite soon after, making it unsuitable for higher currents. The ACS70331 has a sensitivity of 200 mV/A and can measure the current in the range from -5A to +5A. Considering that the operative range of the ACS70331 is approximately 1 MHz, the output voltage variations with the load current are quite fast with no latency. The output voltage from the ACS70331 is fed to the input of the analog-digital converter (ADC), which allows the reading of the conversion data via the I2C interface. The ACS70331 has a small primary
conductor resistance of 1.1 mΩ, resulting in low power dissipation and low-temperature rise due to current flow through the sensor. The sensor has no physical contact with the output pins on the chip as it operates exclusively by the principle of the field generated by the current, which runs through the input pins (primary conductor). The load voltage at the input pins is isolated from the rest of the chip. However, it is unsafe to use at voltages higher than 100V.

Features overview
Development board
Clicker 2 for Kinetis is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4F microcontroller, the MK64FN1M0VDC12 from NXP Semiconductors, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a JTAG programmer connector, and two 26-pin headers for interfacing with external electronics. Its compact design with clear and easily recognizable silkscreen markings allows you to build gadgets with unique functionalities and
features quickly. Each part of the Clicker 2 for Kinetis development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 2 for Kinetis programming method, using a USB HID mikroBootloader or an external mikroProg connector for Kinetis programmer, the Clicker 2 board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Micro-B cable, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or
using a Li-Polymer battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several user-configurable buttons and LED indicators. Clicker 2 for Kinetis is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
NXP
Pin count
121
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Clicker 2 for Kinetis as your development board.














Software Support
Library Description
This library contains API for Hall Current 4 Click driver.
Key functions:
hallcurrent4_get_current_data- This function reads current in mAhallcurrent4_get_raw_data- This function reads raw (ADC) current data
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief HallCurrent4 Click example
*
* # Description
* Demo application shows is reading current data in mA using Hall current 4 Click.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Configuring Clicks and log objects.
*
* ## Application Task
* Reads Current value in mA and logs this data to USBUART every 1 sec.
*
* \author Katarina Perendic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "hallcurrent4.h"
// ------------------------------------------------------------------ VARIABLES
static hallcurrent4_t hallcurrent4;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
hallcurrent4_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
hallcurrent4_cfg_setup( &cfg );
HALLCURRENT4_MAP_MIKROBUS( cfg, MIKROBUS_1 );
hallcurrent4_init( &hallcurrent4, &cfg );
}
void application_task ( void )
{
float current;
current = hallcurrent4_get_current_data( &hallcurrent4 );
log_printf( &logger, " >> Current value: %.2f mA\r\n", current );
log_printf( &logger, " ------------------------- \r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Current sensor