Guarantee dependable motion sensing and security breach notifications with PL-N823-01 and MK64FN1M0VDC12
Guarding your space: Pyroelectric watchdogs!

Published Oct 07, 2023
Click board™
PIR Click
Dev. board
Clicker 2 for Kinetis
Compiler
NECTO Studio
MCU
MK64FN1M0VDC12
Enhance your security systems and smart home devices with our pyroelectric infrared sensor, providing reliable motion detection and intruder alerts
A
A
Hardware Overview
How does it work?
PIR Click is based on the PL-N823-01, a pyroelectric infrared sensor from KEMET. Due to the absence of a lens, KEMET’s Pyro Sensor is low profile, as it does not protrude, which makes it ideal for gathering visual requirements. With KEMET’s proprietary piezoelectric ceramic material and element structure of the Pyroelectric Infrared Sensor, you can also detect humans through glass or resin. This allows more freedom in the design of the outer appearance of the end product. Such a sensor system aims to provide the reliable human detection and human scenario perception. In order to achieve this goal, a conditioning sensing circuit with a low-noise signal amplifier with adjusted amplification gain is developed. Besides, the gain amplification, the onboard circuit serves also as a proprietary 1Hz signal filter, which ensures rejection of all unwanted components of the signal. That way, a reliable movement
detection system is achieved. The output signal is routed to the AN pin of the mikroBUS™, as well as to the MCP3221 – a 12-Bit A/D Converter with I2C Interface, from microchip. That way, the user can choose whether to read the output signal via the I2C interface, or directly, by reading the voltage on the analog pin of the used MCU. Some of the numerous benefits of using this particular click, equiped with the PL-N823-01 infrared sensor, are a wide view angle up to 60 degrees ether way, detection possible through glass or resin, low power consumption, excellent radio wave performance in high-frequency band, a compact and low profile (5.0x4.8x1.7mm) and all of this is possible without a lens because it is not required. The low power consumption that we are speaking of is down in the μA range. When it comes to the performance characteristics, the operating temperature should be between -40C to +70C
and the storage temperature should be between -40C to +85C. The PIR Click board™ offers a selection between 3.3V and 5V operation, with the onboard SMD jumper, labeled as PWR SEL. This allows both 3.3V and 5V MCUs to be interfaced with this Click board™. The attached device datasheet contains an in-depth explanation of all the mentioned functions. However, Mikroe provides a library with functions that make the final code clean and readable, simplifying working with this device. These functions internally employ the aforementioned communication mechanism and expose only a simple and clean interface to the user. The provided example code demonstrates the functionality of these functions. It can be used as a reference point for a custom development.


Features overview
Development board
Clicker 2 for Kinetis is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4F microcontroller, the MK64FN1M0VDC12 from NXP Semiconductors, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a JTAG programmer connector, and two 26-pin headers for interfacing with external electronics. Its compact design with clear and easily recognizable silkscreen markings allows you to build gadgets with unique functionalities and
features quickly. Each part of the Clicker 2 for Kinetis development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 2 for Kinetis programming method, using a USB HID mikroBootloader or an external mikroProg connector for Kinetis programmer, the Clicker 2 board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Micro-B cable, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or
using a Li-Polymer battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several user-configurable buttons and LED indicators. Clicker 2 for Kinetis is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
NXP
Pin count
121
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

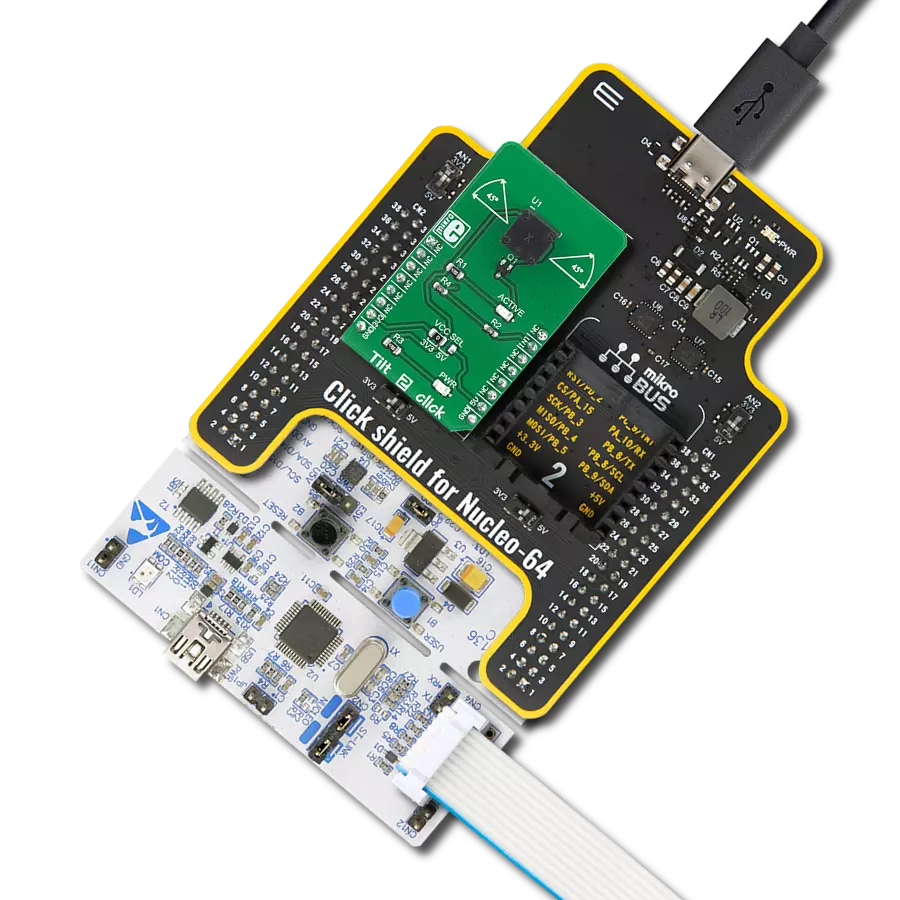
Start by selecting your development board and Click board™. Begin with the Clicker 2 for Kinetis as your development board.













Software Support
Library Description
This library contains API for PIR Click driver.
Key functions:
pir_get_adc- Reading 12bit ADC valuepir_reg_read- Reading registerpir_get_mili_volt- Reading ADC data in mili Volts
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Pir Click example
*
* # Description
* This application which generates a voltage when exposed to infrared radiation.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes device.
*
* ## Application Task
* Reads ADC data, converts it to miliVolts and logs scaled value in miliVolts.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "pir.h"
// ------------------------------------------------------------------ VARIABLES
static pir_t pir;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
pir_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
pir_cfg_setup( &cfg );
PIR_MAP_MIKROBUS( cfg, MIKROBUS_1 );
pir_init( &pir, &cfg );
}
void application_task ( void )
{
uint16_t adc_val;
float map_out;
adc_val = pir_get_adc( &pir );
map_out = pir_scale_results( &pir, adc_val, 0, 3303 );
log_printf( &logger, " Voltage: %.2f miliVolts \r\n", map_out);
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END