Building stable motion sensing solution with ICG-1020S and STM32L496AG
Helping you keep your balance in a topsy-turvy world!
Published Jul 22, 2025
Click board™
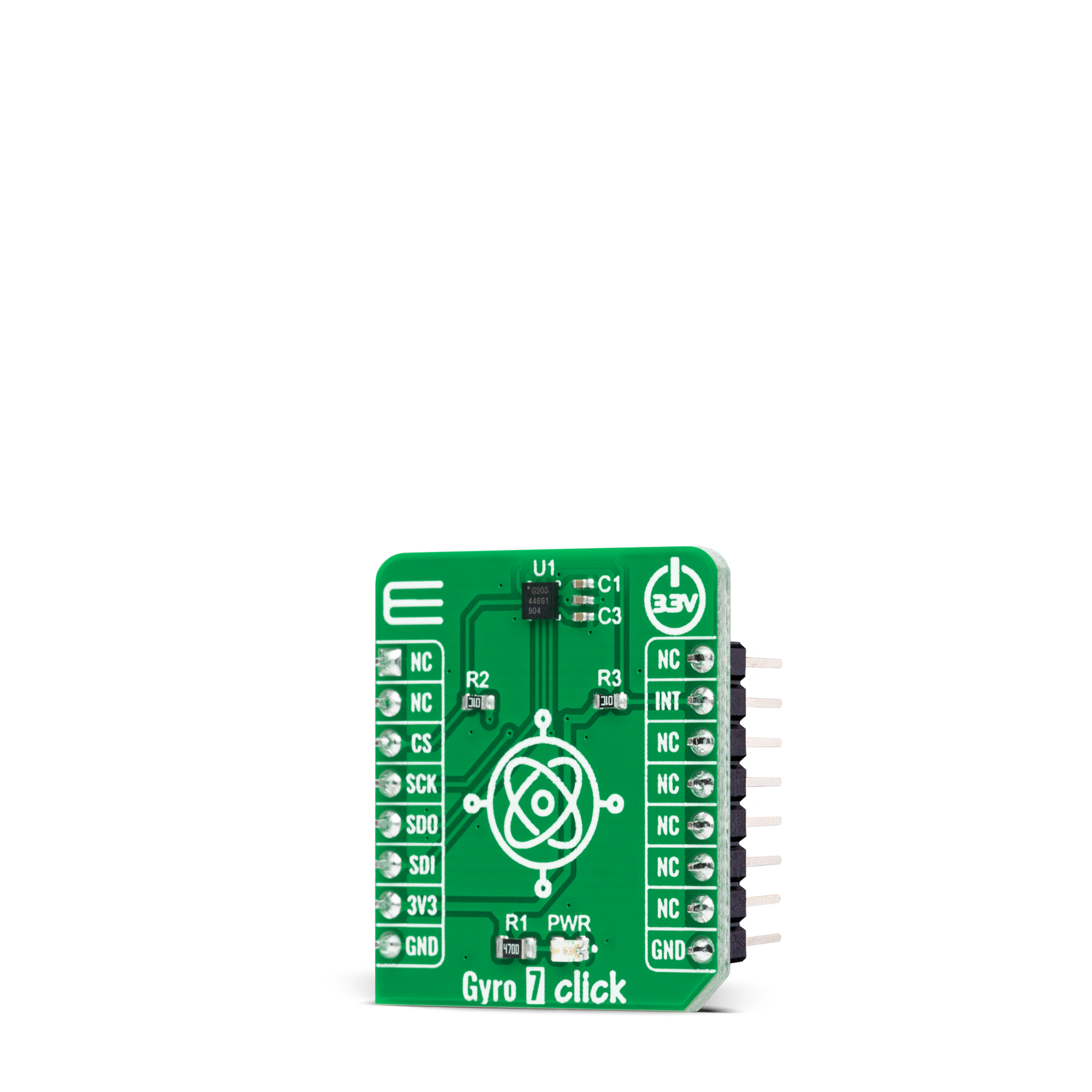
Gyro 7 Click
Dev. board
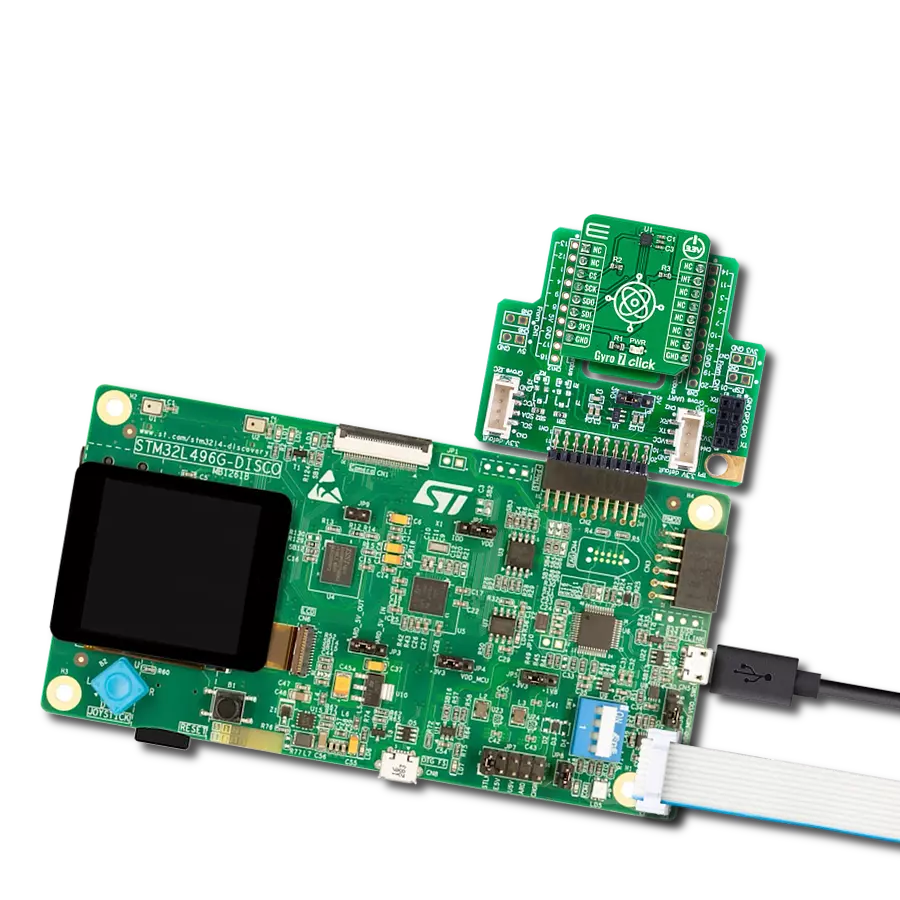
Discovery kit with STM32L496AG MCU
Compiler
NECTO Studio
MCU
STM32L496AG
Advanced solution for precise orientation and angular velocity measurement and stabilization
A
A
Hardware Overview
How does it work?
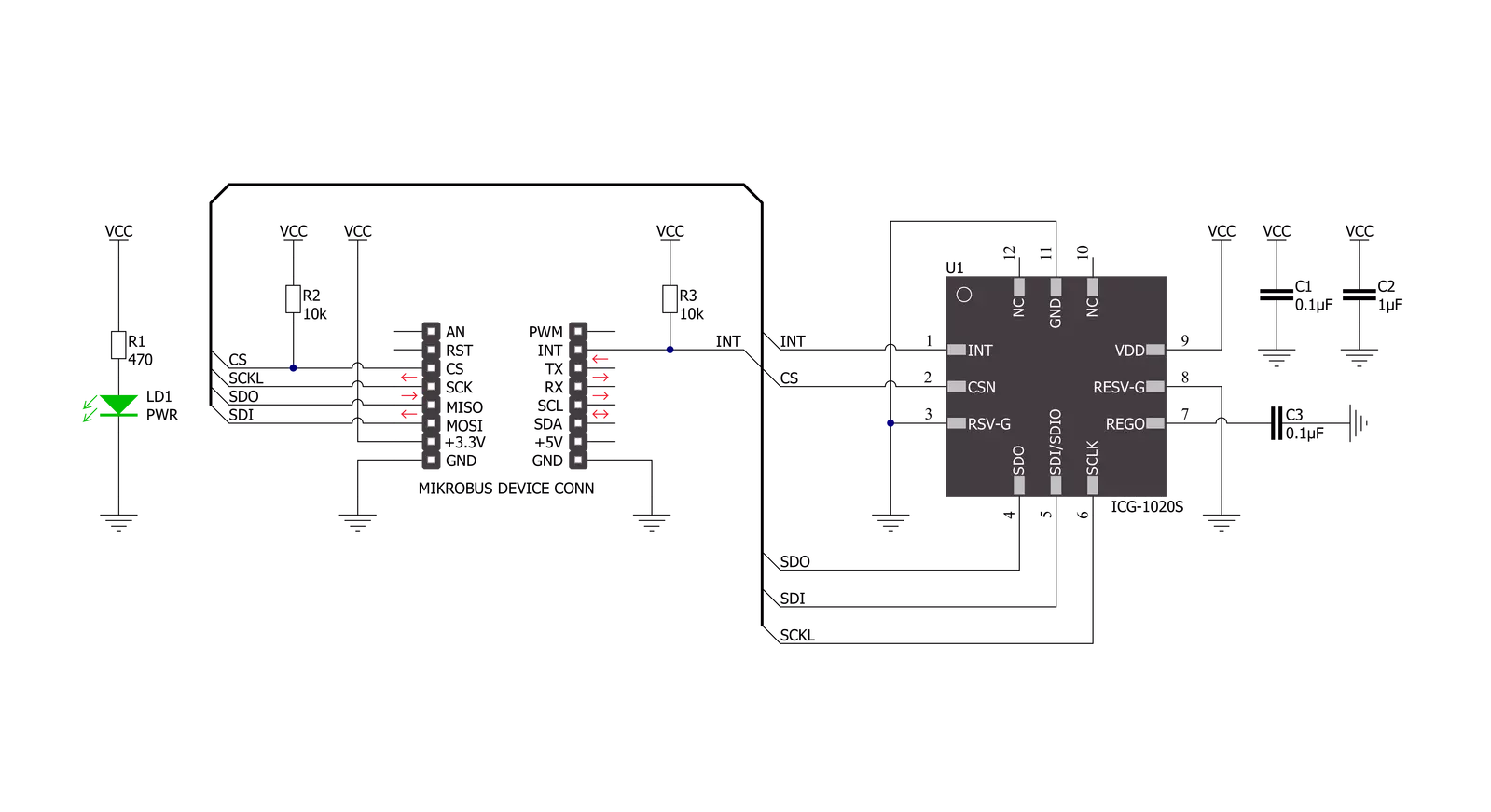
Gyro 7 Click is based on the ICG-1020S, a high-performance 2-axis gyroscope from TDK InvenSense. The ICG-1020S is highly configurable with a full-scale programmable range from ±46.5dps to ±374dps. The single structure vibratory MEMS rate gyroscope detects the X- and Y-axis rotation. When the gyroscope is rotated about any sense axes, the Coriolis effect causes a detected vibration. The resulting signal is amplified, demodulated, and filtered to produce a proportional voltage to the angular rate. With its 2-axis integration, this Click board™ allows users to design it into an optical image stabilization (OIS) application. Two-axis MEMS rate gyroscope sensor, the ICG-1020S,
comes with integrated 16-bit ADCs and signal conditioning with two axes XY configuration. After digitizing the signal, data is processed through a digital filter and output through sensor data registers. Besides, the ICG-1020S is also characterized by high resolution and low RMS noise, noise density, a fast sample rate of up to 32kHz, and low power consumption. Gyro 7 Click communicates with MCU through a register-selectable standard SPI interface that enables high clock speed up to 20MHz, supporting the two most common SPI modes, SPI Mode 0 and 3. Other blocks include onboard clocking, temperature compensation, and bias circuits.
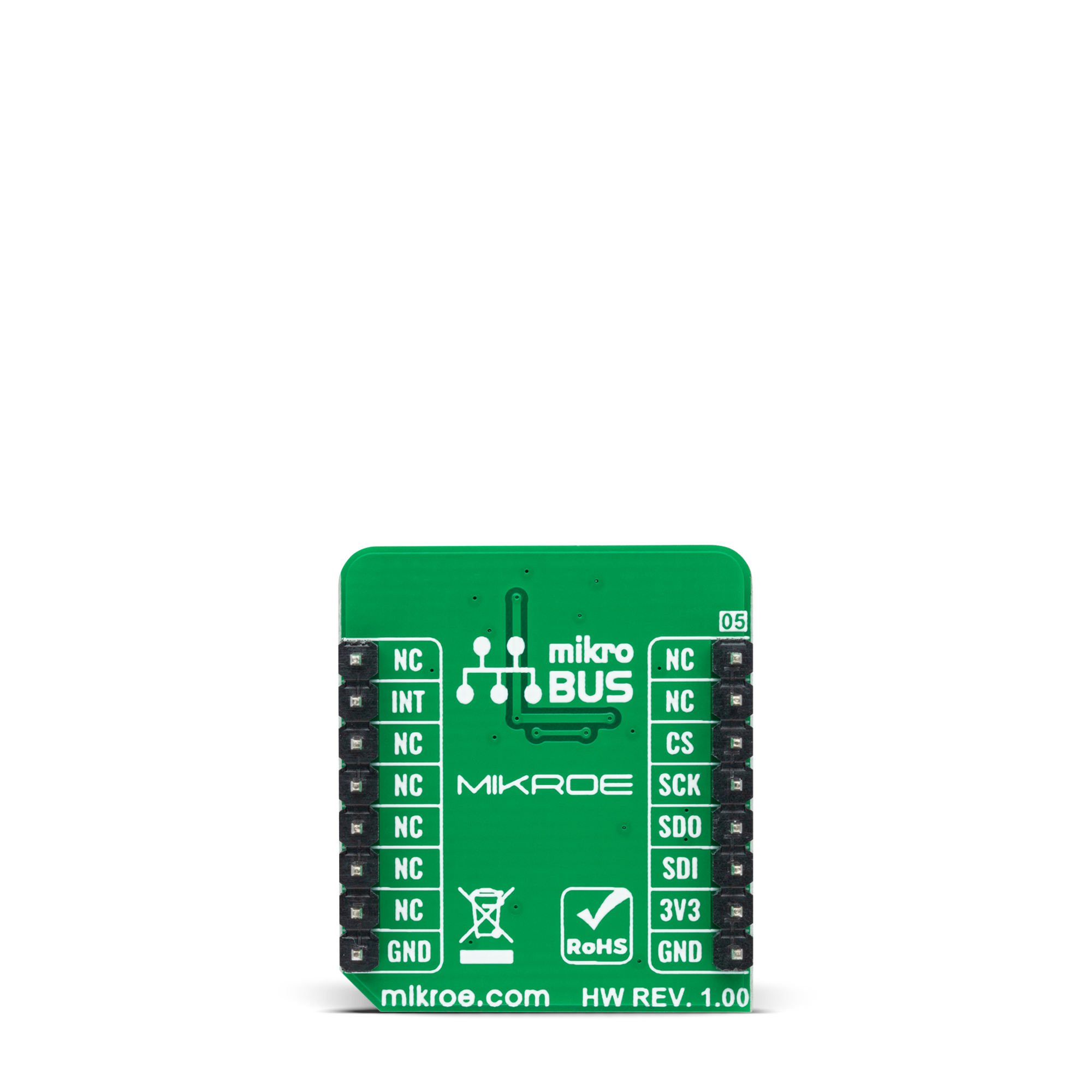
The sensor data registers contain the latest gyro data, which are read-only registers accessible via the serial interface. Data from these registers may be read anytime. It also possesses an additional interrupt signal, routed on the INT pin of the mikroBUS™ socket labeled as INT, indicating when a specific interrupt event occurs. This Click board™ can only be operated with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
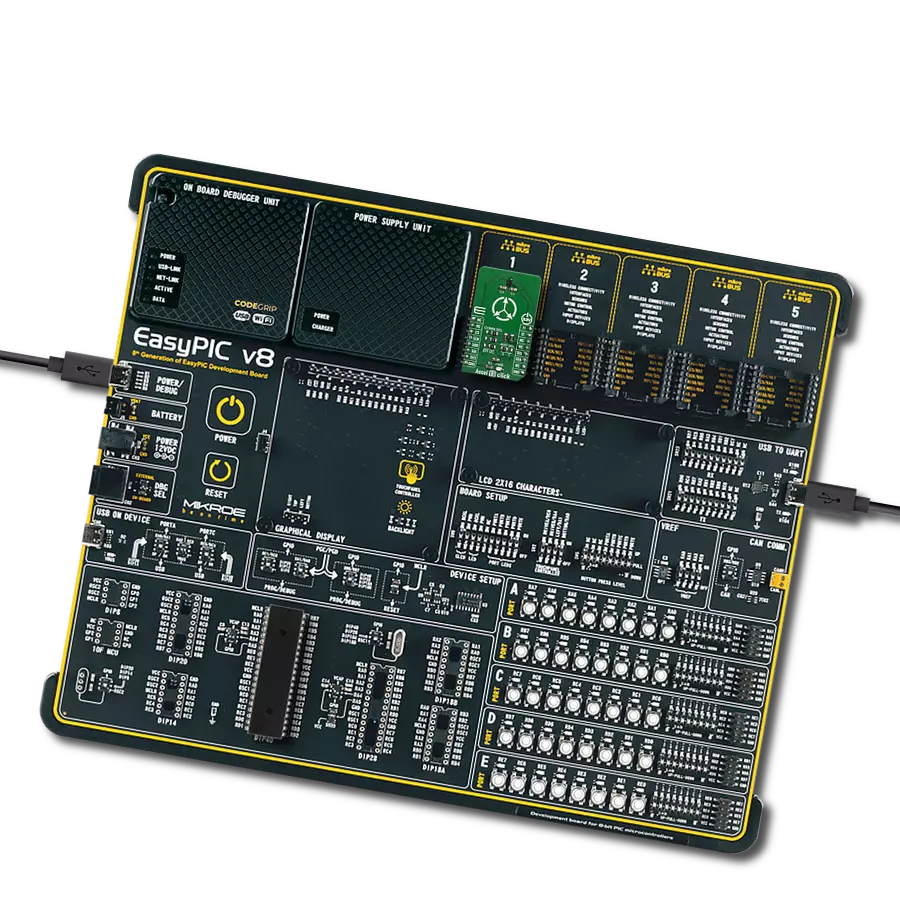
The 32L496GDISCOVERY Discovery kit serves as a comprehensive demonstration and development platform for the STM32L496AG microcontroller, featuring an Arm® Cortex®-M4 core. Designed for applications that demand a balance of high performance, advanced graphics, and ultra-low power consumption, this kit enables seamless prototyping for a wide range of embedded solutions. With its innovative energy-efficient
architecture, the STM32L496AG integrates extended RAM and the Chrom-ART Accelerator, enhancing graphics performance while maintaining low power consumption. This makes the kit particularly well-suited for applications involving audio processing, graphical user interfaces, and real-time data acquisition, where energy efficiency is a key requirement. For ease of development, the board includes an onboard ST-LINK/V2-1
debugger/programmer, providing a seamless out-of-the-box experience for loading, debugging, and testing applications without requiring additional hardware. The combination of low power features, enhanced memory capabilities, and built-in debugging tools makes the 32L496GDISCOVERY kit an ideal choice for prototyping advanced embedded systems with state-of-the-art energy efficiency.
Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
STMicroelectronics
Pin count
169
RAM (Bytes)
327680
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
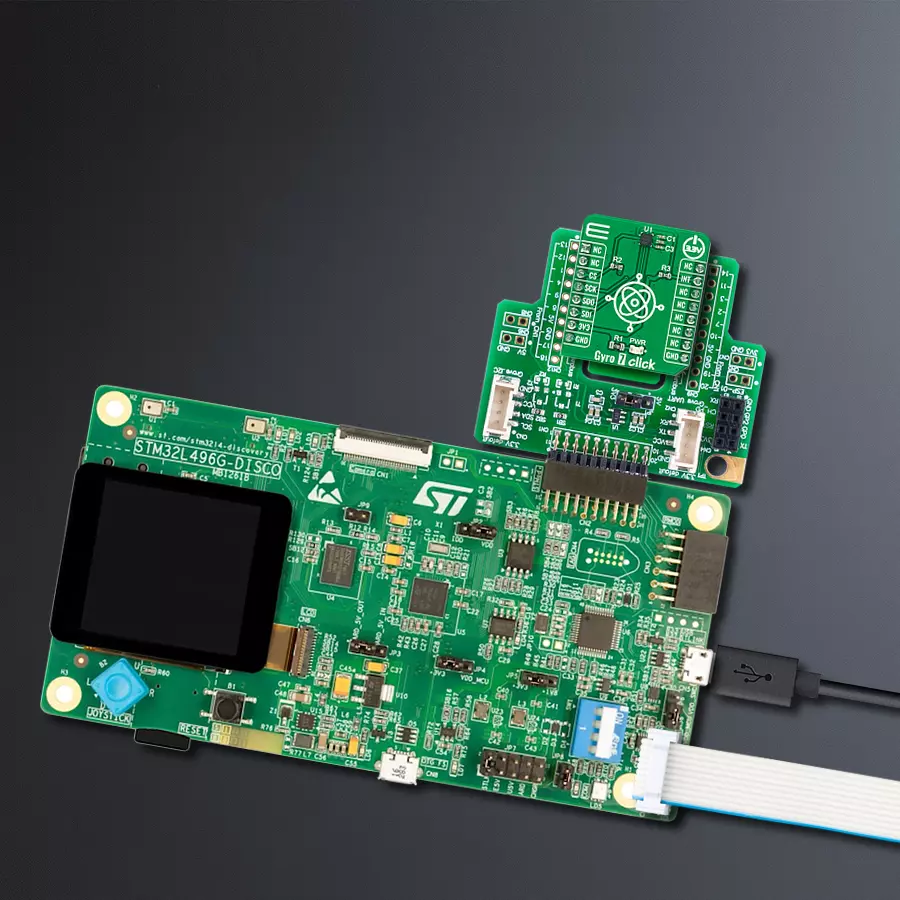
Step by step
Project assembly
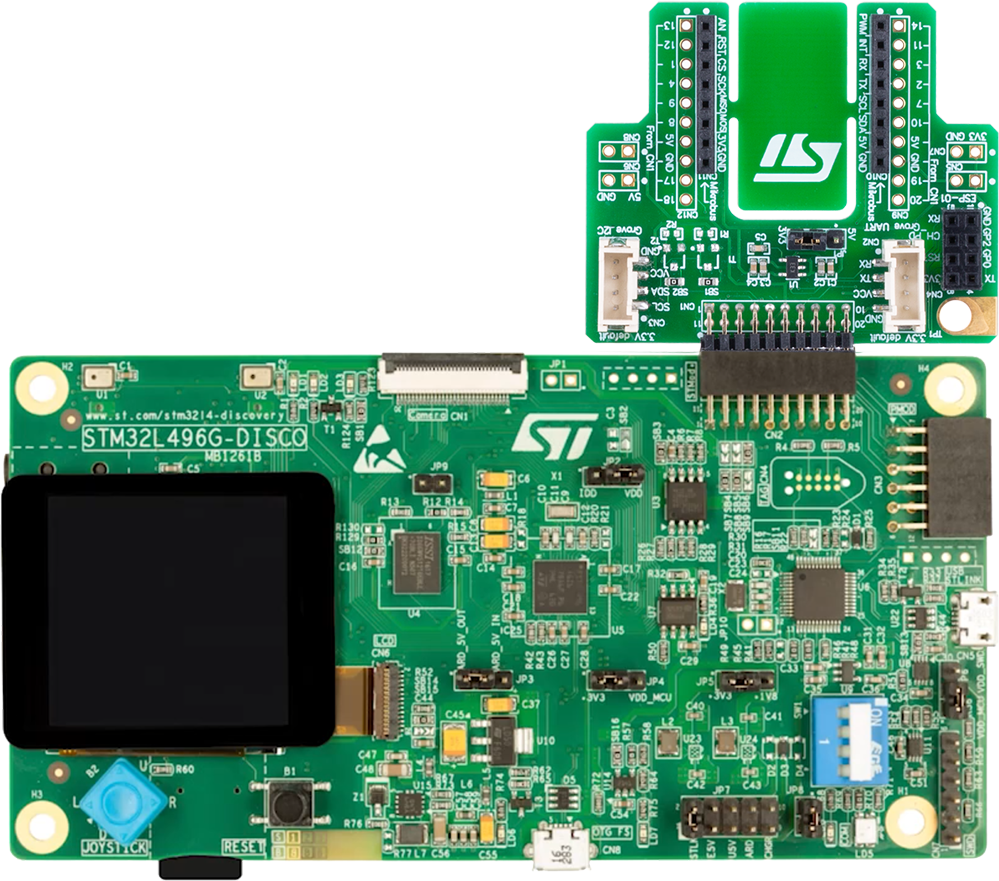
Start by selecting your development board and Click board™. Begin with the Discovery kit with STM32L496AG MCU as your development board.










Software Support
Library Description
This library contains API for Gyro 7 Click driver.
Key functions:
gyro7_get_int_pinThis function returns the INT pin logic state.gyro7_read_gyroscopeThis function reads the gyroscope's X and Y axis in degrees per second (dps).gyro7_read_temperatureThis function reads the internal temperature in Celsius.
Open Source
Code example
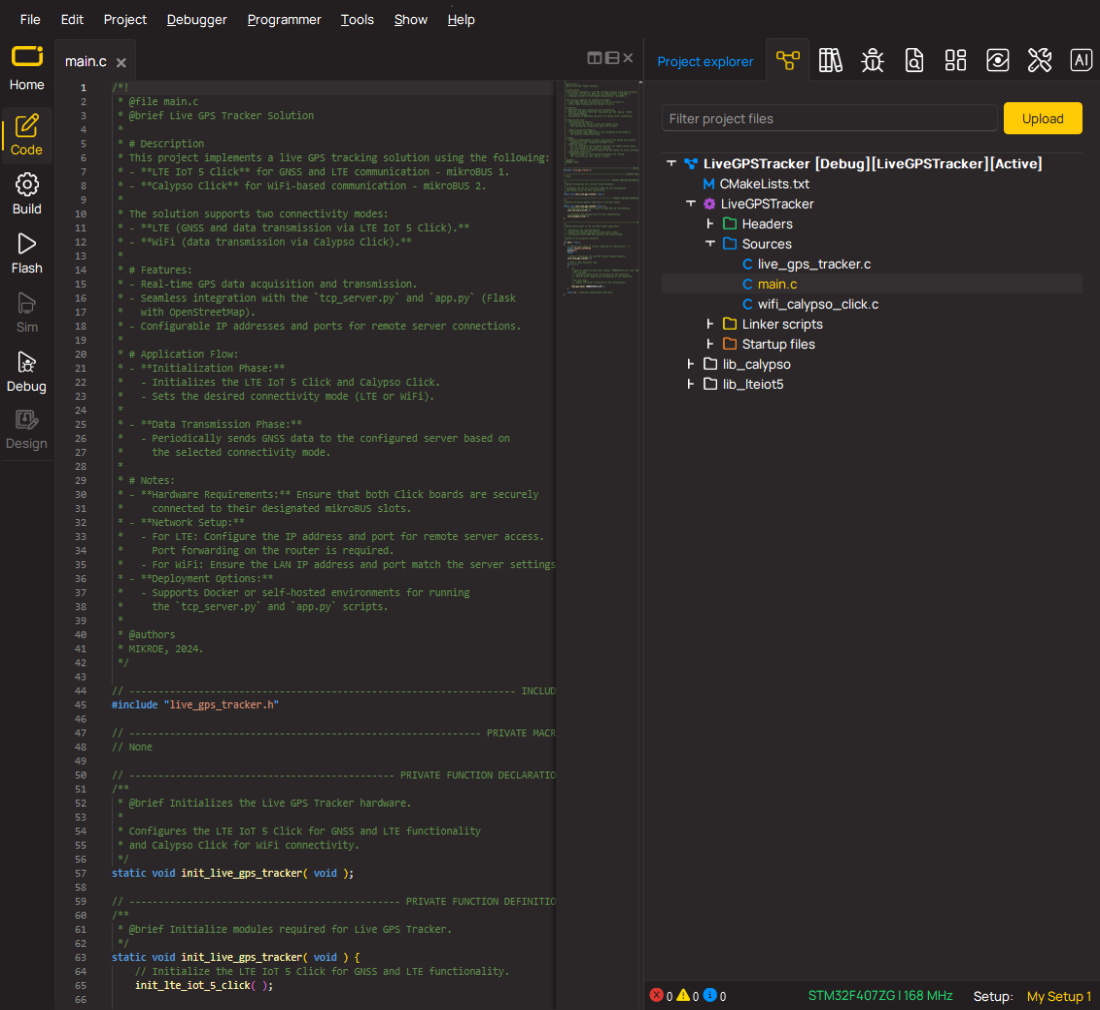
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Gyro7 Click example
*
* # Description
* This example demonstrates the use of Gyro 7 Click board by reading and displaying
* the values of X and Y axis in degrees per second and the chip internal temperature in Celsius.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration which sets the sample rate
* to 40 Hz, gyroscope resolution to 374 dps, and enables the data ready interrupt.
*
* ## Application Task
* Waits for the data ready interrupt, then reads the values of X and Y gyroscope axis as well as
* the chip internal temperature and displays the results on the USB UART. The data sample rate is
* set to 40Hz by default, therefore the data is being read approximately every 25ms.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "gyro7.h"
static gyro7_t gyro7;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
gyro7_cfg_t gyro7_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
gyro7_cfg_setup( &gyro7_cfg );
GYRO7_MAP_MIKROBUS( gyro7_cfg, MIKROBUS_1 );
if ( SPI_MASTER_ERROR == gyro7_init( &gyro7, &gyro7_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( GYRO7_ERROR == gyro7_default_cfg ( &gyro7 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( gyro7_get_int_pin ( &gyro7 ) )
{
float x_axis, y_axis, temperature;
if ( GYRO7_OK == gyro7_read_gyroscope ( &gyro7, &x_axis, &y_axis ) )
{
log_printf( &logger, " X : %.2f dps\r\n", x_axis );
log_printf( &logger, " Y : %.2f dps\r\n", y_axis );
}
if ( GYRO7_OK == gyro7_read_temperature ( &gyro7, &temperature ) )
{
log_printf( &logger, " Temperature : %.2f C\r\n\n", temperature );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion